SPI中的极性CPOL和相位CPHA
详解SPI中的极性CPOL和相位CPHA
(2) CKPHA (Clock Phase) = CPHA = PHA = Phase = (时钟)相位
(3) SCK=SCLK=SPI的时钟
(4) Edge=边沿,即时钟电平变化的时刻,即上升沿(rising edge)或者下降沿(falling edge)
- 极性=CPOL
- 相位=CPHA
- SCLK=时钟
- 第一个边沿和第二个边沿
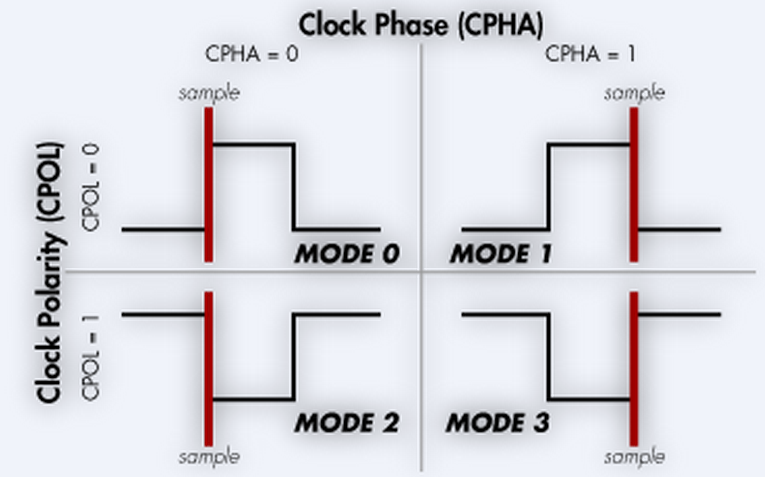
CPOL极性
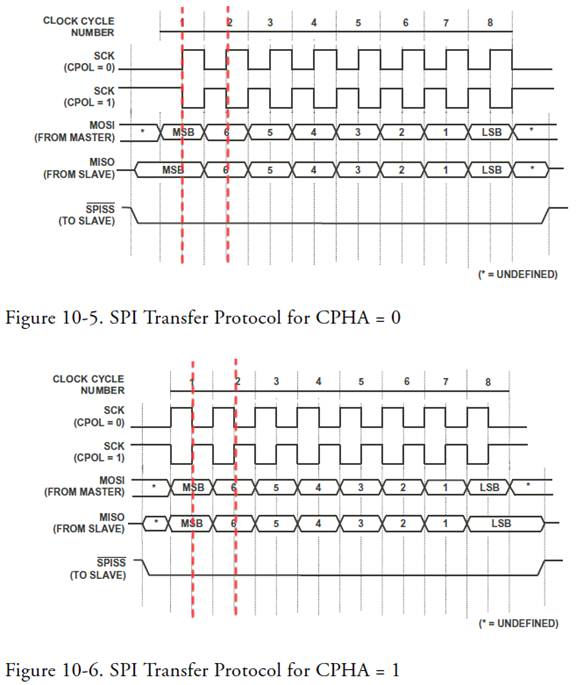
先说什么是SCLK时钟的空闲时刻,其就是当SCLK在发送8个bit比特数据之前和之后的状态,
CPOL=0,时钟空闲idle时候的电平是低电平,所以当SCLK有效的时候,就是高电平,就是所谓的active-high;
CPOL=1,时钟空闲idle时候的电平是高电平,所以当SCLK有效的时候,就是低电平,就是所谓的active-low;
CPHA相位
首先说明一点,capture strobe = latch = read = sample,都是表示数据采样,数据有效的时刻。
对于CPOL=0,idle时候的是低电平,第一个边沿就是从低变到高,所以是上升沿;
对于CPOL=1,idle时候的是高电平,第一个边沿就是从高变到低,所以是下降沿;
对于CPOL=0,idle时候的是低电平,第二个边沿就是从高变到低,所以是下降沿;
对于CPOL=1,idle时候的是高电平,第一个边沿就是从低变到高,所以是上升沿;
如何判断CPOL和CPHA
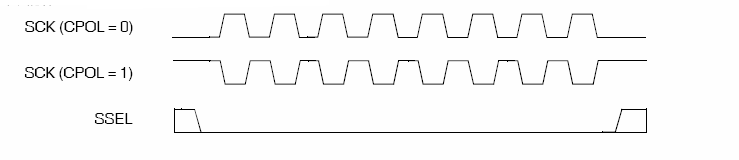
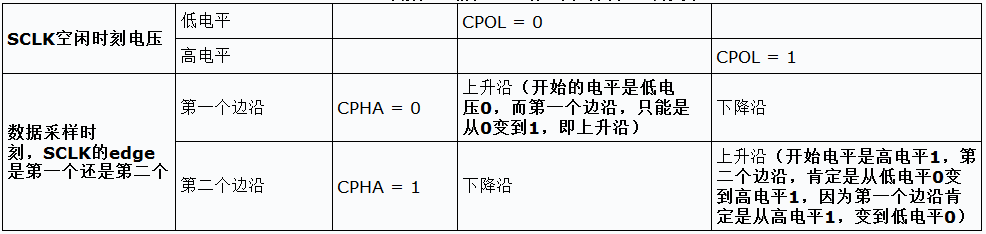
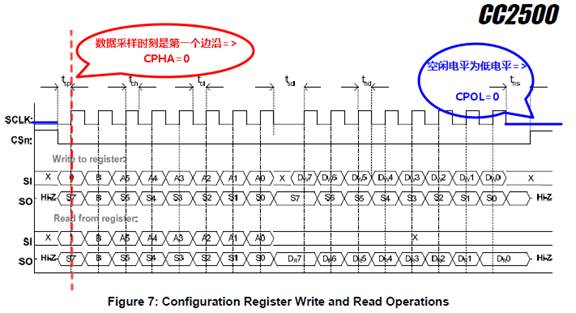
(1)如何判断CPOL:SCLK的空闲时候的电压,是0还是1,决定了CPOL是0还是1;
(2)如何判断CPHA:而数据采样时刻对应着的SCLK的电平,是第一个边沿还是第二个边沿,对应着CPHA为0还是1。
此处,再多解释一下可能会遇到的CKP和CKE,其是Microchip的PIC系列芯片中的说法。
(1)CKP是Clock Polarity Select,就是极性=CPOL:
CKP,虽然名字和CPOL不一样,但是都是指时钟相位的选择,定义也一样:
CKP: Clock Polarity Select bit
1 = Idle state for clock (CK) is a high level
0 = Idle state for clock (CK) is a low level
所以不多解释。
(2)CKE是Clock Edge Select,就是相位=CPHA:
CKE: SPI Clock Edge Select bit
1 = Transmit occurs on transition from active to Idle clock state
0 = Transmit occurs on transition from Idle to active clock state
意思是
1 =(数据)传输发生在时钟从有效状态转到空闲状态的那一时刻
0 =(数据)传输发生在时钟从空闲状态转到有效状态的那一时刻
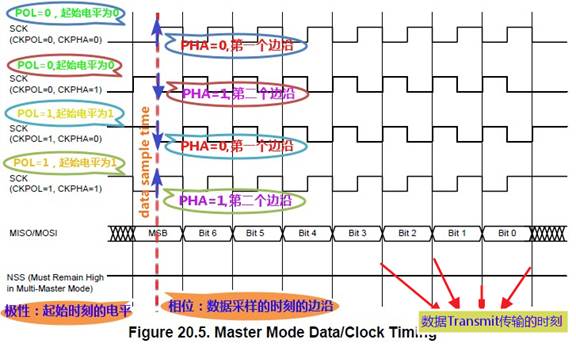
其中,数据传输的时刻,即图中标出的“数据transmit传输的时刻”,很明显,
该时刻是一个时钟和下一个时钟之间交界的地方,对应的不论是上升沿还是下降沿,
都与我们前面提到的CPHA=数据采样的时刻,的边沿方向所相反。
所以,此处的CKE,正好与CPHA相反。
所以,CKP和CKE所对应的取值的含义为:
When CKP = 0: CKE=1 => Data transmitted on rising edge of SCK, CKE=0 => Data transmitted on falling edge of SCK
When CKP = 1: CKE=1 => Data transmitted on falling edge of SCK, CKE=0 => Data transmitted on rising edge of SCK
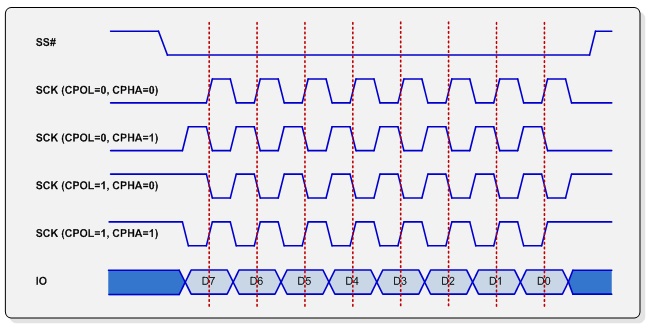
STM32F4 SPI Data clock timing diagram
Clock phase and clock polarity
Four possible timing relationships may be chosen by software, using the CPOL and CPHA bits in the SPI_CR1 register.
The CPOL (clock polarity) bit controls the steady state value of the clock when no data is being transferred.
This bit affects both master and slave modes.
If CPOL is reset, the SCK pin has a low-level idle state.
If CPOL is set, the SCK pin has a high-level idle state.
If the CPHA (clock phase) bit is set, the second edge on the SCK pin is the MSBit capture strobe.
(falling edge if the CPOL bit is reset, rising edge if the CPOL bit is set)
Data are latched on the occurrence of the second clock transition.
If the CPHA bit is reset, the first edge on the SCK pin is the MSBit capture strobe.
(falling edge if CPOL bit is set, rising edge if CPOL bit is reset)
Data are latched on the occurrence of the first clock transition.
The combination of the CPOL (clock polarity) and CPHA (clock phase) bits selects the data capture clock edge.
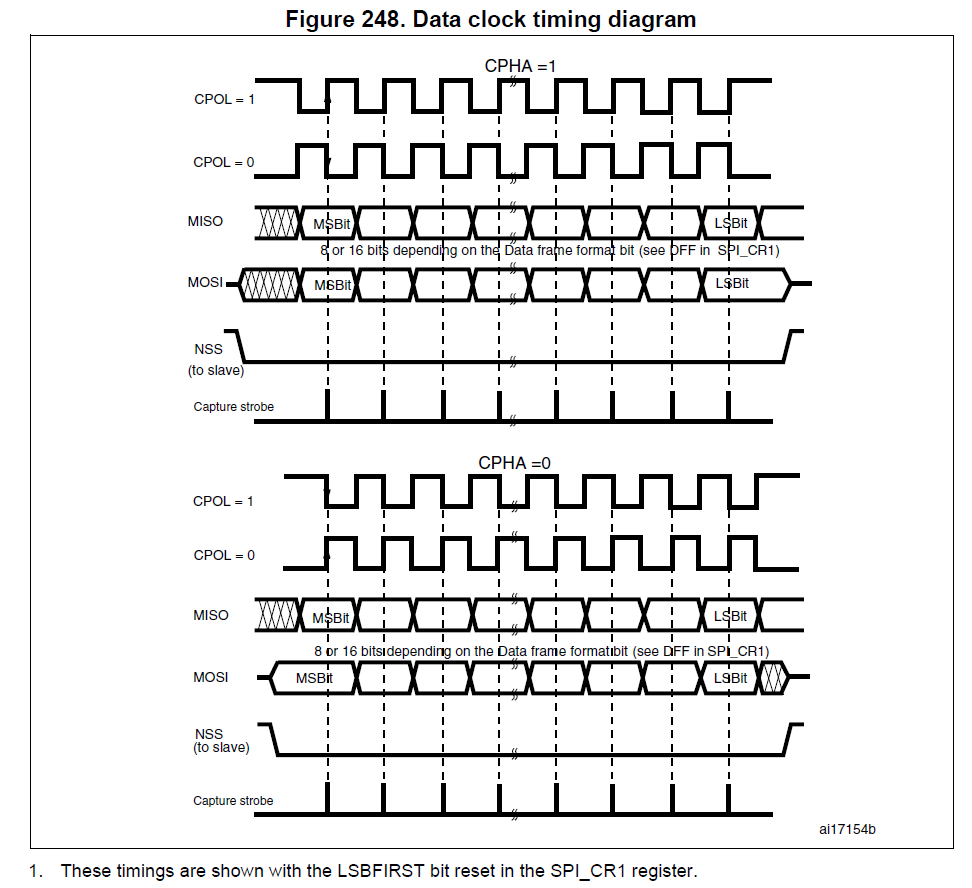
Figure 248, shows an SPI transfer with the four combinations of the CPHA and CPOL bits.
The diagram may be interpreted as a master or slave timing diagram
where the SCK pin, the MISO pin, the MOSI pin are directly connected
between the master and the slave device.
Note:
Prior to changing the CPOL/CPHA bits the SPI must be disabled by resetting the SPE bit.
Master and slave must be programmed with the same timing mode.
The idle state of SCK must correspond to the polarity selected in the SPI_CR1 register
(by pulling up SCK if CPOL=1 or pulling down SCK if CPOL=0).
The Data Frame Format (8- or 16-bit) is selected through the DFF bit in SPI_CR1 register,
and determines the data length during transmission/reception.
SPI Transfer Modes
SPI interface allows to transmit and receive data simultaneously on two lines (MOSI and MISO).
Clock polarity (CPOL) and clock phase (CPHA) are the main parameters
that define a clock format to be used by the SPI bus.
Depending on CPOL parameter, SPI clock may be inverted or non-inverted.
CPHA parameter is used to shift the sampling phase.
If CPHA=0 the data are sampled on the leading (first) clock edge.
If CPHA=1 the data are sampled on the trailing (second) clock edge,
regardless of whether that clock edge is rising or falling.
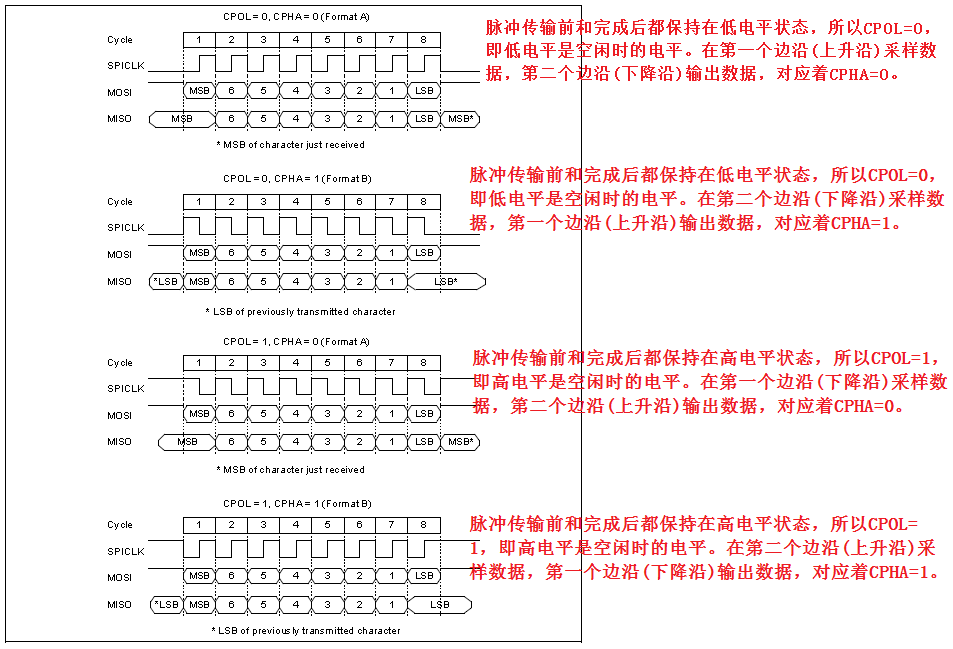
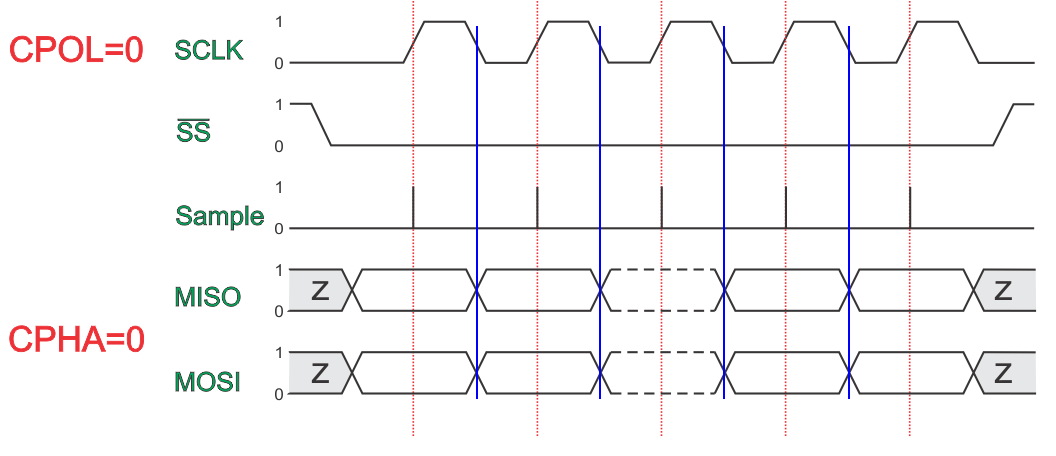
CPOL=0, CPHA=0
The data must be available before the first clock signal rising.
The clock idle state is zero.
The data on MISO and MOSI lines must be stable while the clock is high and can be changed when the clock is low.
The data is captured on the clock's low-to-high transition and propagated on high-to-low clock transition.
CPOL=0, CPHA=1
The first clock signal rising can be used to prepare the data.
The clock idle state is zero.
The data on MISO and MOSI lines must be stable while the clock is low and can be changed when the clock is high.
The data is captured on the clock's high-to-low transition and propagated on low-to-high clock transition.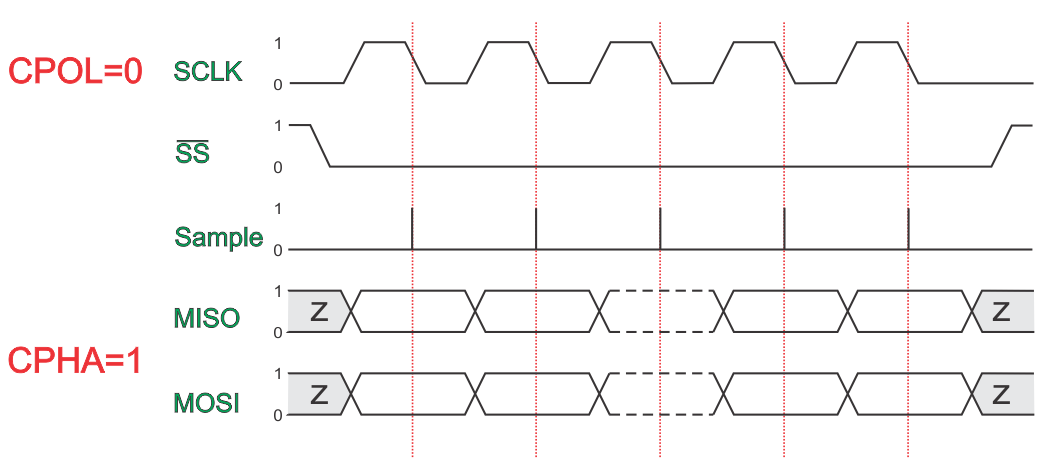
CPOL=1, CPHA=0
The data must be available before the first clock signal falling.
The clock idle state is one.
The data on MISO and MOSI lines must be stable while the clock is low and can be changed when the clock is high.
The data is captured on the clock's high-to-low transition and propagated on low-to-high clock transition.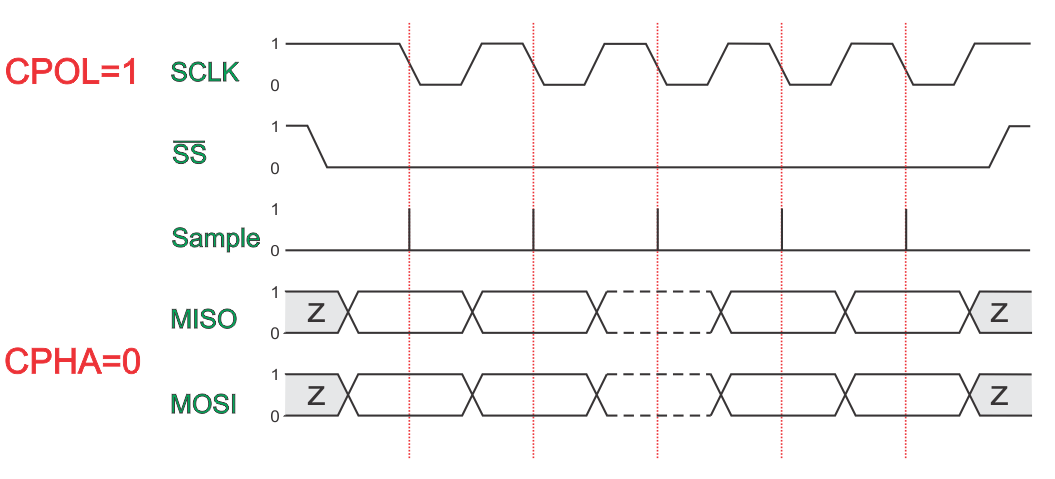
CPOL=1, CPHA=1
The first clock signal falling can be used to prepare the data.
The clock idle state is one.
The data on MISO and MOSI lines must be stable while the clock is high and can be changed when the clock is low.
The data is captured on the clock's low-to-high transition and propagated on high-to-low clock transition.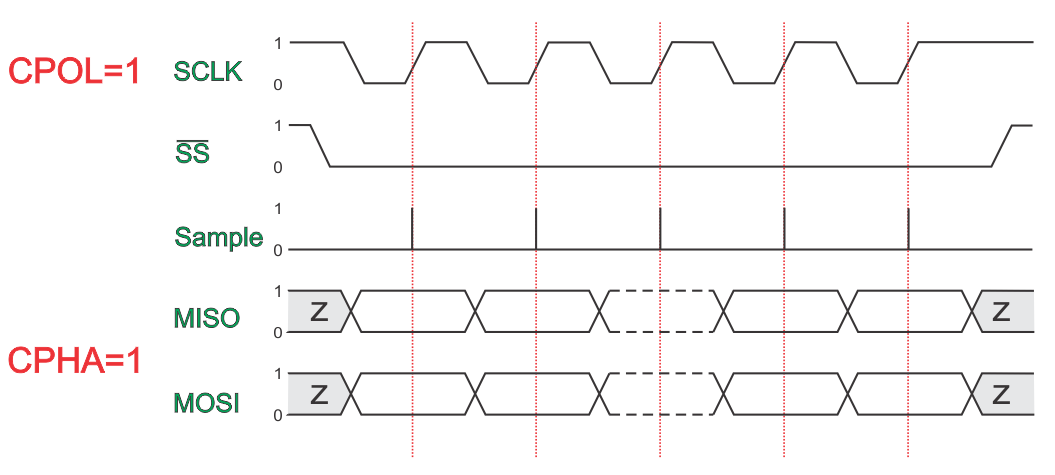
SPI Modes and Timing.
Introduction
In a lot of cases, when using SPI, we do need to use "SPI_Init_Advanced".
It has a number of parameters. Here the parameters regarding the SPI "mode" are described. The "mode" consists of
- The SPI clock (SCK) polarity (parameter clock_idle)
- The PIC SPI data out transmit edge (parameter edge)
in
- procedure SPIx_Init_Advanced(..., data_sample, clock_idle, edge: word);
The "data_sample" parameter does not belong to the actual "SPI mode", it is an extra feature of the MCU, see here.
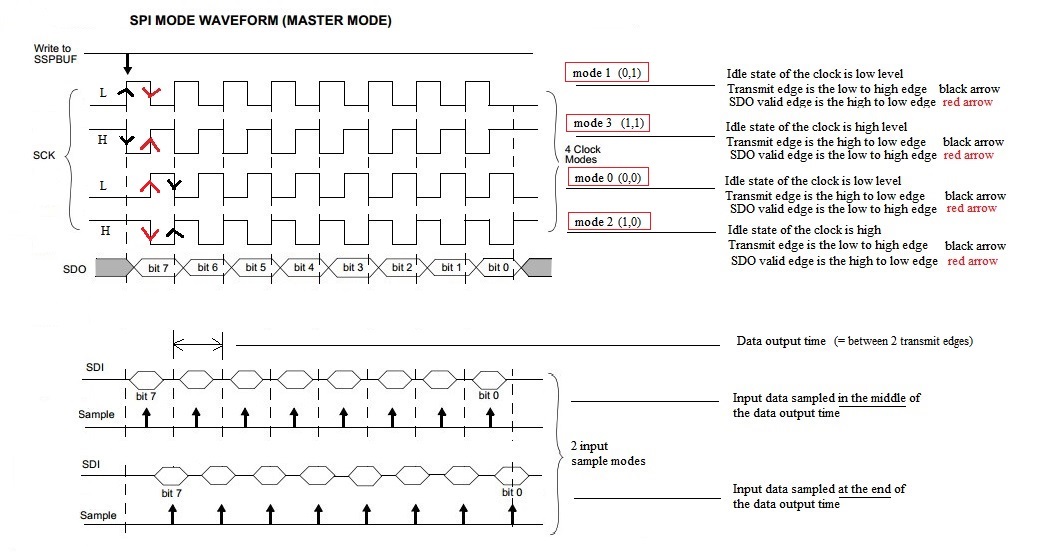
The SPI "Modes"
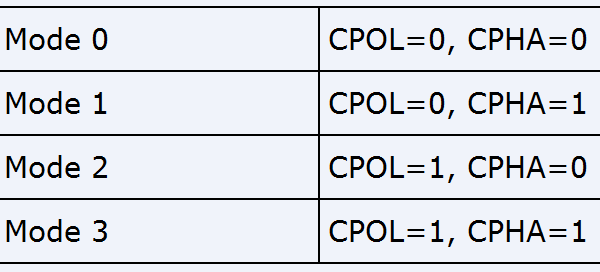
SPI knows 4 "standard" modes, reflecting the SCK's polarity (CPOL) and the SCK's phase (CPHA).
The definition is:
| SPI Mode | CPOL | CPHA |
|---|---|---|
| 0 (or 0,0) | 0 | 0 |
| 1 (or 0,1) | 0 | 1 |
| 2 (or 1,0) | 1 | 0 |
| 3 (or 1,1) | 1 | 1 |
The meaning is:
CPOL:
- 0 = Clock Idle low level
- 1 = Clock Idle high level
CPHA:
- 0 = SDO transmit edge (*) active to idle
- 1 = SDO transmit edge idle to active
(*): the transmit edge is the clock edge at which the SDO level changes
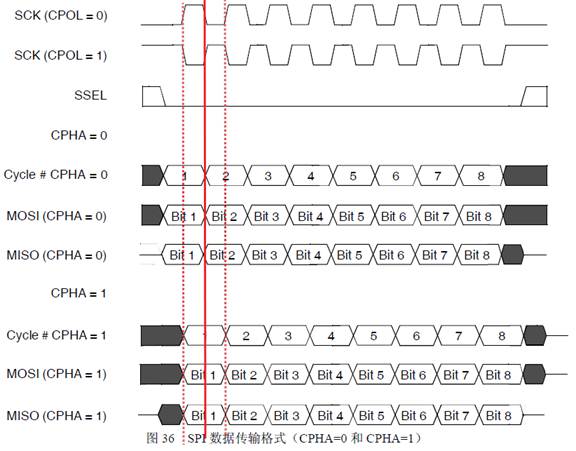
In a timing diagram this looks like(only one clock pulse shown here):
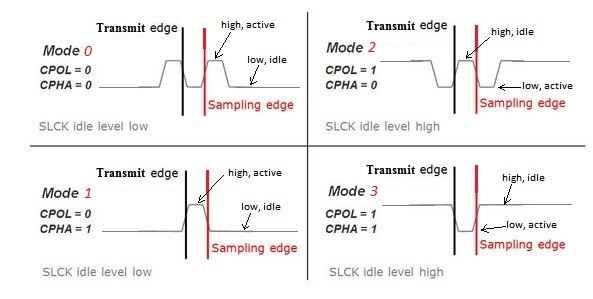
The Transmit edge is the clock edge at which the SPI output data changes,
the Sampling edge is the clock edge at which the sampling of the SPI input data takes place.
The sampling edge is normally the opposite one of the transmit edge, but see also here.
SPI and PIC/ dsPIC
The PIC MCU supports a 4 SPI modes, but the MCU registers involved are named differently and behave differently.
The 2 MCU registers are CKP (Clock Polarity) and CKE (Clock edge).
The relation between those 2 registers and the SPI modes is:
| SPI Mode | CKP | CKE |
|---|---|---|
| 0 (or 0,0) | 0 | 1 |
| 1 (or 0,1) | 0 | 0 |
| 2 (or 1,0) | 1 | 1 |
| 3 (or 1,1) | 1 | 0 |
As you can see, CKP behaves the same as CPOL, CKE is the inverse of CPHA.
This means that a simple "SPI_Set_mode" looks like this:
- procedure Set_SPI_mode(CPOL_, CPHA_: byte);
- // The 2 paremeters are:
- // CPOL: SPI clock polarity: 0 = Clock Idle LOW; 1 = Clock Idle HIGH
- // CPHA: SPI clock Phase: 0 = Transmit edge active to idle; 1 = Transmit edge Idle to active
- begin
- CKP_bit := CPOL_;
- CKE_bit := (CPHA_ xor 1) and 1; // invert bit zero
- end;
Above routine can e.g. used after a usage of an mE SPIx_Init... routine to (re)set the SPI mode.
The mE SPI library usage
In the mE SPI library the "SPI mode" is set by 2 parameters of the "SPIx_Init_Advanced" function.
The the parameters for PIC are : "clock_idle" and "transmit_edge"
The the parameters for dsPIC are: "clock_idle" and "edge"
Important: in both cases the last parameter ("transmit edge" or "edge" parameter) is
NOT the transmit edge, but the other one, called the "Sampling edge",
see here. As you can see the name of the PIC parameter is wrong (it says "transmit_edge").
Furthermore the constant values used to give the parameters their values are:
For PIC:
CPK: _SPI_CLK_IDLE_LOW and _SPI_CLK_IDLE_HIGH
CPE: _SPI_LOW_2_HIGH, _SPI_HIGH_2_LOW (**)
For dsPIC:
CPK: _SPI_CLK_IDLE_LOW and _SPI_CLK_IDLE_HIGH
CPE: _SPI_ACTIVE_2_IDLE, _SPI_IDLE_2_ACTIVE (**)
(**) Again: the "edge" is the "Sampling Edge", not the "Transmit Edge", see here.
Deriving the parameters from the device's "SPI mode"
The easiest way is using the "SPI mode" if known, the hardest is deriving the parameters from the device's timing diagram.
The table below gives the relationship between an SPI device's "SPI mode" and the parameter values to use with "SPIx_Init_Advanced":
| SPI MODE | clock idle parameter | Edge parameter = the "Sampling" edge |
|---|---|---|
| 0,0 | _SPI_CLK_IDLE_LOW | _SPI_LOW_2_HIGH (pic) : _SPI_IDLE_2_ACTIVE (dsPIC) |
| 0,1 | _SPI_CLK_IDLE_LOW | _SPI_HIGH_2_LOW (pic) : _SPI_ACTIVE_TO_IDLE (dsPIC) |
| 1,0 | _SPI_CLK_IDLE_HIGH | _SPI_HIGH_2_LOW (pic) : _SPI_IDLE_TO_ACTIVE (dsPIC) |
| 1,1 | _SPI_CLK_IDLE_HIGH | _SPI_LOW_2_HIGH (pic) : _SPI_ACTIVE_TO_IDLE (dsPIC) |
Important:
In mikroPascal the parameter "edge" represents the clock edge where in input data is sampled,
not the "transmit edge" (the clock edge at which the SDO data is changed).
The parameter "data sample" is not included in the "SPI mode",
but usually "_SPI_DATA_SAMPLE_MIDDLE" will do fine, see however also here.
Defining parameters from the device's timing diagram
This manner has to be applied if the "SPI mode" of the device at hand is not (explicitely) defined.
To find out the necessary values of the parameters we have to look to the device's SPI timing diagram we want to handle:
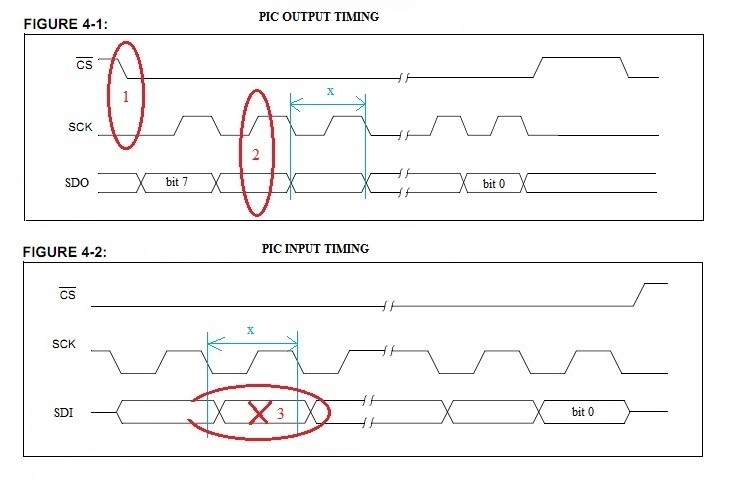
Keep in mind that in the "device" diagram the "device" timing is shown.
For the PIC timing input and output should be interchanged (which was already done in the above diagram,
it shows the timing from the PIC's perspective).
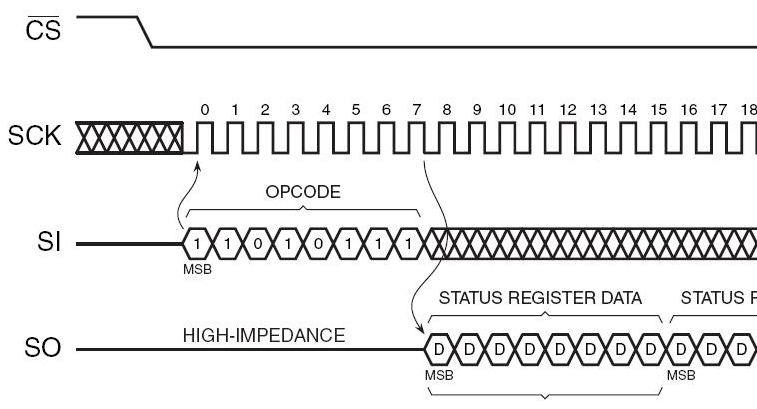
1. The "clock_idle" parameter
See 1 in the diagram. The level wanted is the SCK level at the moment notCS changes. In the diagram this level is zero, so: theclock idle is low.
This means also that (again in our case) the clock active level is high.
2. The "edge" parameter
See 2 in the diagram. The edge wanted is the one in the middle between 2 PIC output (PIC SO) datachanges (two "transmit" edges, represented by "x" in the timing diagram).
In our case we see that it is the edge from low to high, or from idle to active.
The "data_sample" parameter
The data_sample parameter is not defined in the SPI mode, it is an extra feature of the MCU.
Normally the "Sampling edge" (see here) is the opposite one of the "transmit edge".
This is achieved by setting the "data_sample" parameter to the value "_SPI_DATA_SAMPLE_MIDDLE".
The sampling moment can however be shifted to the same moment as the transmit edge
by setting the "data_sample" parameter to the value "_SPI_DATA_SAMPLE_END" value, see here).
How to define which one to use:
See 3 in the above diagram.
First define the "data output time", represented by an x in the timing diagram.
It is the time from one PIC output data (PIC SO) change to the next.
Now compare the device data out (SO = PIC SI) with the "data output time".
The data_sample value we have is the best moment in the "data output time"
the PIC should take a sample of its input data (the device output data).
In our case, the middle of the "data output time" seems to be the most appropriate (at the end would be not bad either).
Info
a. Timing diagram (derived and modified from Mchp datasheet)
This is the (master) timing diagram with the terms explained:
SPI中的极性CPOL和相位CPHA的更多相关文章
- 详解SPI中的极性CPOL和相位CPHA
SPI由于接口相对简单(只需要4根线),用途算是比较广泛,主要应用在 EEPROM,FLASH,实时时钟,AD转换器,还有数字信号处理器和数字信号解码器之间.即一个SPI的Master通过SPI与一个 ...
- 嵌入式开发之davinci--- spi 中的时钟极性CPOL和相位CPHA
PI的极性Polarity和相位Phase,最常见的写法是CPOL和CPHA,不过也有一些其他写法,简单总结如下:(1) CKPOL (Clock Polarity) = CPOL = POL = P ...
- Dubbo学习笔记6:Dubbo增强SPI与SPI中扩展点自动包装的实现原理
在Dubbo整体架构分析中介绍了Dubbo中除了Service和Config层为API外,其他各层均为SPI,为SPI意味着下面各层都是组件化可以被替换的,也就是扩展性比较强,这也是Dubbo比较好的 ...
- (转)SPI时钟极性、时钟相位
SPI协议是一个 4 线.全双工的串口协议.根据串口时钟SCLK的相位SCPH和极性SCPOL的不同,有 4 种组合. CPOL CPHA MODE0 0 0 MODE1 0 1 MODE2 1 0 ...
- ServiceLoader在SPI中的重要作用分析
对于线程上下文类加载器在之前已经对它进行了详细的理论化的学习,其中对于这个类加载器应用最多的也就是在SPI场合下用来打破双亲委托机制,如之前所描述的: 这次举一个具体的例子来进一步的加深对线程上下文类 ...
- SPI相位跟极性介绍
[详解]SPI中的极性CPOL和相位CPHA是什么以及如何设置 2012-03-0214:34:10| 分类:单片机 | 标签: |字号大中小 订阅 版本:2011-08-15 作者:crif ...
- SPI总线介绍
1. 简介 SPI, Serial Peripheral Interface, 串行外设接口, 是一种高速的.全双工.同步的通信总线SPI在芯片的管脚上只占用四根线 SPI接口主要用于MCU与各种外围 ...
- STC8A8K64S4A12通过SPI接口操作基于ST7920的LCD12864液晶模块
文章地址:https://www.cnblogs.com/jqdy/p/12665430.html 1. 硬件连接 1.1 64引脚的STC8A8K64S4A12 使用的是最小核心板,所以引脚皆引出可 ...
- SPI详解2
串行外设接口 (SPI) 总线是一种运行于全双工模式下的同步串行数据链路.用于在单个主节点和一个或多个从节点之间交换数据. SPI 总线实施简单,仅使用四条数据信号线和控制信号线(请参见图 1). 图 ...
随机推荐
- 【转】CocoaLumberjack——带颜色的Log
CHENYILONG Blog [转]CocoaLumberjack--带颜色的Log - 趣味苹果开发 - 博客园 转自:趣味苹果开发 CocoaLumberjack--带颜色的Log Coco ...
- C# p2p UDP穿越NAT,UDP打洞源码
思路如下(参照源代码): 1. frmServer启动两个网络侦听,主连接侦听,协助打洞的侦听. 2. frmClientA和frmClientB分别与frmServer的主连接保持联系. 3. 当f ...
- 洛谷 P4910 帕秋莉的手环 矩阵乘法+快速幂详解
矩阵快速幂解法: 这是一个类似斐波那契数列的矩乘快速幂,所以推荐大家先做一下下列题目:(会了,差不多就是多倍经验题了) 注:如果你不会矩阵乘法,可以了解一下P3390的题解 P1939 [模板]矩阵加 ...
- Redis常见操作命令
1.库相关 select 索引 => 选择库 dbsize => 查询当前库中Key的数量 flushdb => 清空当前库 flushall => 清空所有库(建议不要用,除 ...
- 如何生成能在没有安装opencv库及vs2010环境的电脑上运行的exe文件
项目基本算法已经完成,甲方需要一个可以运行的demo.目前,程序能在自己的电脑上正常运行.移植到其他win7系统上,运行失败. 寻找各种解决办法,baidu找到两个办法: 1.使用静态链接的方法,这种 ...
- 管中窥豹:从Page Performance看Nand Flash可靠性【转】
转自:https://blog.csdn.net/renice_ssd/article/details/53332746 如果所有的page performace在每次program时都是基本相同的, ...
- 013_Mac OS X下应该如何卸载软件和安装应用软件
一.Mac OS X下应该如何卸载软件 Mac OS X的软件安装方式有很多种,而软件卸载的情况也很不同.在Mac OS X拆除软件往往不是把软件拉到废止篓里那么简单.通常情况下要具体问题具体分析.无 ...
- tomcat报错catalina.sh: line 401: /usr/java/jdk1.7.52/bin/java: No such file or directory
将生产服务器的Tomcat目录打包过来后解压后,启动Tomcat后,发现如下问题: # ./shutdown.sh Using CATALINA_BASE: /usr/local/tomcat ...
- Codeforces 1088E Ehab and a component choosing problem
Ehab and a component choosing problem 如果有多个连接件那么这几个连接件一定是一样大的, 所以我们先找到值最大的连通块这个肯定是分数的答案. dp[ i ]表示对于 ...
- flume修改配置文件
flume修改配置文件后,flume进程会自动将配置文件更新至服务中,同时会初始化日志,重新对于metrics进行记录的. 所以拿api做监控的同学要注意这点啦