Harris Corner(Harris角检测)
在做图像匹配时,常需要对两幅图像中的特征点进行匹配。为了保证匹配的准确性,所选择的特征必须有其独特性,角点可以作为一种不错的特征。
那么为什么角点有其独特性呢?角点往往是两条边缘的交点,它是两条边缘方向变换的一种表示,因此其两个方向的梯度变换通常都比较大并且容易检测到。
这里我们理解一下Harris Corner 一种角点检测的算法
角点检测基本原理:
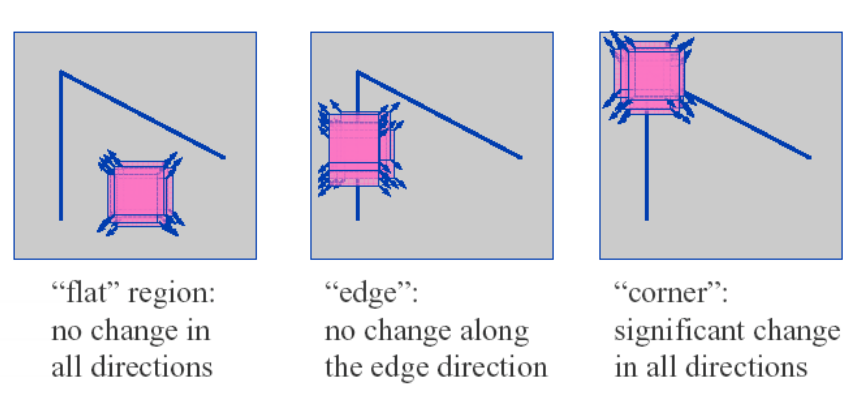
人们通常通过在一个小的窗口区域内观察点的灰度值大小来识别角点,如果往任何方向移动窗口都会引起比较大的灰度变换那么往往这就是我们要找的角点。如下图右
下面我们看一下Harris的数学公式,对于[x,y]平移[u,v]个单位后强度的变换有下式,I(x+u,y+v)是平移后的强度,I(x,y)是原图像像素。对于括号里面的值,如果是强度恒定的区域,那么它就接近于零,反之如果强度变化剧烈那么其值将非常大,所以我们期望E(u,v)很大。
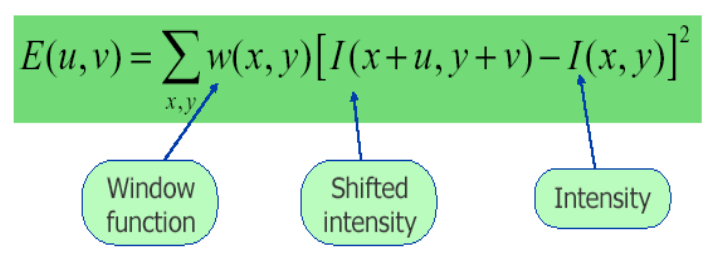
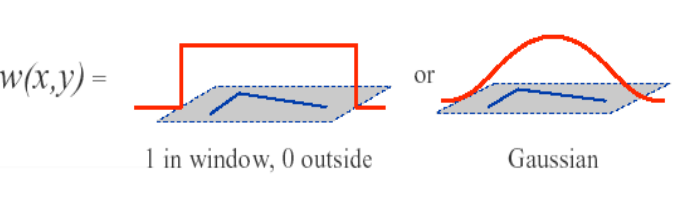
其中w是窗函数,它可以是加权函数,也可以是高斯函数
利用二维泰勒展开式我们有
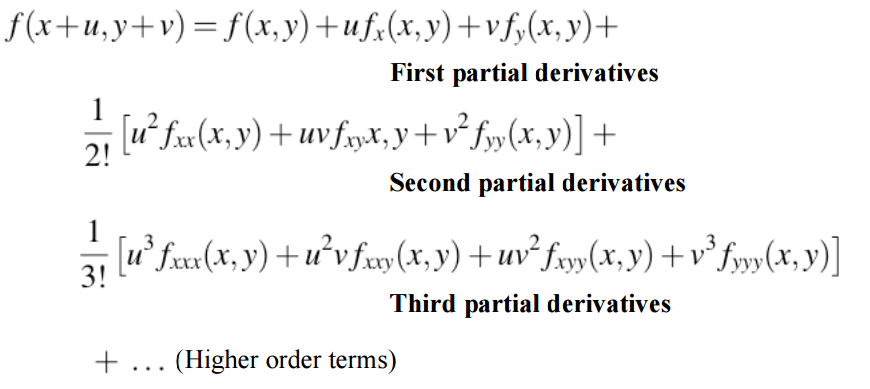
所以其中一阶可以近似为

于是我们可以给出Harris Corner的如下推导,其中Ix,Iy是x,y方向的Gradient模,乘以位移得到位移后的量
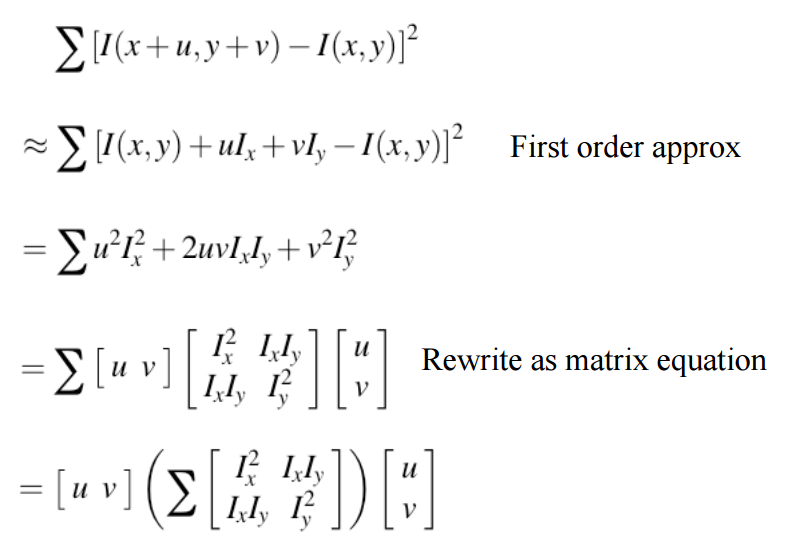
对于小的位移,我们可以用双线性插值方法近似:
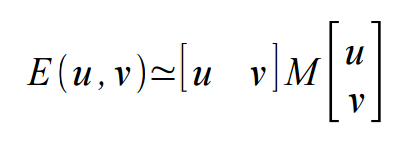
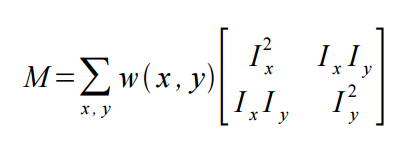
其中M为2*2矩阵如下
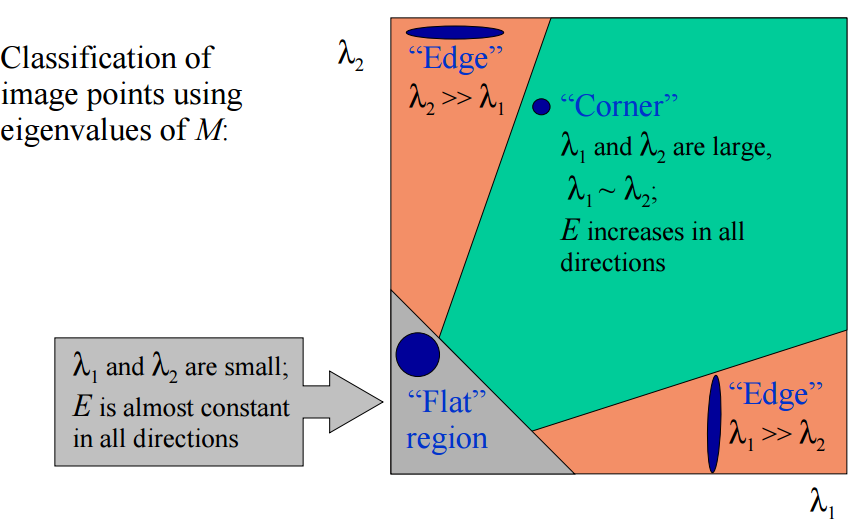
在本质上我们可以把二次项看成一个椭圆函数,我们对M进行特征值分析有λ1,λ2
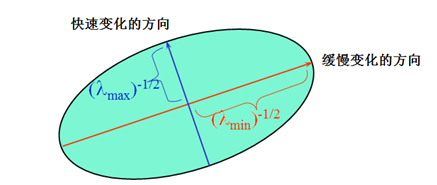
根据λ1,λ2的值我们可以把其分为三类:
1.λ1,λ2都很小且近似,E在所以方向接近于常数;
2.λ1>>λ2,或者λ2>>λ1, E将在某一方向上很大;
3.λ1,λ2都很大且近似,E将在所以方向上很大;
如图所示:
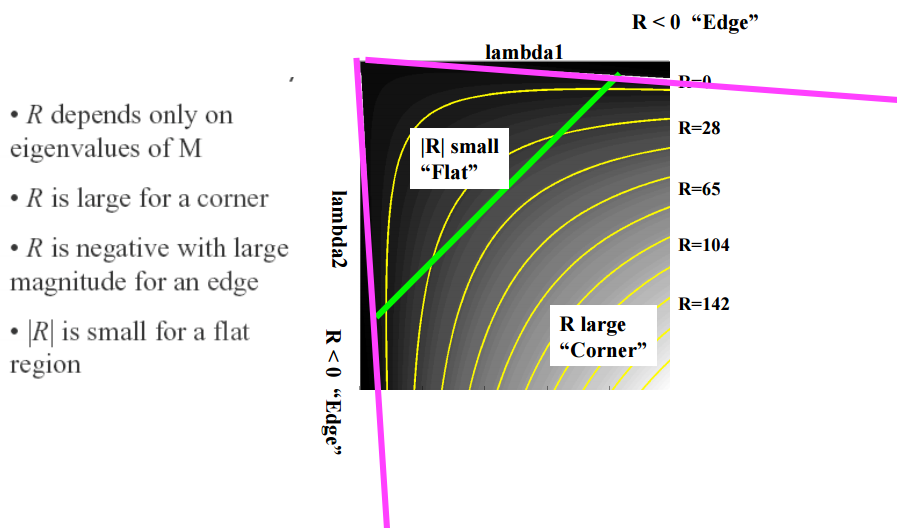
最后我们通过计算角点响应值R来判断其属于哪个区间

其中k一般为常数取在0.04-0.06间。
算法步骤:
1.计算图像x,y方向的梯度Ix,Iy

2.计算每个像素点的梯度平方

3.计算梯度在每个像素点的和

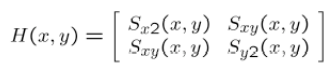
4.定义在每个像素点的矩阵H,也就是前面的M
5.计算每个像素的角点响应

6.设置阈值找出可能点并进行非极大值抑制
代码:
close all
clear all I = imread('empire.jpg');
I = rgb2gray(I);
I = imresize(I,[500,300]);
imshow(I); sigma = 1;
halfwid = sigma * 3; [xx, yy] = meshgrid(-halfwid:halfwid, -halfwid:halfwid); Gxy = exp(-(xx .^ 2 + yy .^ 2) / (2 * sigma ^ 2));
Gx = xx .* exp(-(xx .^ 2 + yy .^ 2) / (2 * sigma ^ 2));
Gy = yy .* exp(-(xx .^ 2 + yy .^ 2) / (2 * sigma ^ 2)); %%apply sobel in herizontal direction and vertical direction compute the
%%gradient
%fx = [-1 0 1;-1 0 1;-1 0 1];
%fy = [1 1 1;0 0 0;-1 -1 -1];
Ix = conv2(I,Gx,'same');
Iy = conv2(I,Gy,'same');
%%compute Ix2, Iy2,Ixy
Ix2 = Ix.*Ix;
Iy2 = Iy.*Iy;
Ixy = Ix.*Iy; %%apply gaussian filter
h = fspecial('gaussian',[6,6],1);
Ix2 = conv2(Ix2,h,'same');
Iy2 = conv2(Iy2,h,'same');
Ixy = conv2(Ixy,h,'same');
height = size(I,1);
width = size(I,2);
result = zeros(height,width);
R = zeros(height,width);
Rmax = 0;
%% compute M matrix and corner response
for i = 1:height
for j =1:width
M = [Ix2(i,j) Ixy(i,j);Ixy(i,j) Iy(i,j)];
R(i,j) = det(M) - 0.04*(trace(M)^2);
if R(i,j)> Rmax
Rmax = R(i,j);
end
end
end
%% compare whith threshold
count = 0;
for i = 2:height-1
for j = 2:width-1
if R(i,j) > 0.01*Rmax
result(i,j) = 1;
count = count +1;
end
end
end %non-maxima suppression
result = imdilate(result, [1 1 1; 1 0 1; 1 1 1]); [posc,posr] = find(result == 1);
imshow(I);
hold on;
plot(posr,posc,'r.');

本文原创,转载请注明出处
Harris Corner(Harris角检测)的更多相关文章
- 【OpenCV十六新手教程】OpenCV角检测Harris角点检测
本系列文章由@浅墨_毛星云 出品.转载请注明出处. 文章链接:http://blog.csdn.net/poem_qianmo/article/details/29356187 作者:毛星云(浅墨) ...
- OpenCV角点检测源代码分析(Harris和ShiTomasi角点)
OpenCV中常用的角点检测为Harris角点和ShiTomasi角点. 以OpenCV源代码文件 .\opencv\sources\samples\cpp\tutorial_code\Trackin ...
- Harris Corner
Harris Corner网上已经有很多的资料了,但它也是我读研究生后读的第一篇论文,对我有一种特别的意义. 这篇文章我想从几个方面来讲解Harris Corner,一是Harris Corner的思 ...
- OpenCV-Python 哈里斯角检测 | 三十七
目标 在本章中, 我们将了解"Harris Corner Detection"背后的概念. 我们将看到以下函数:cv.cornerHarris(),cv.cornerSubPix( ...
- (13)Corner Detection角点检测
import cv2 import numpy as np img=cv2.imread('opencv-corner-detection-sample.jpg') gray = cv2.cvtCol ...
- 目标检测之harr---点角检测harr
Haar特征与积分图 1. Adaboost方法的引入 1.1 Boosting方法的提出和发展 在了解Adaboost方法之前,先了解一下Boosting方法. 回答一个是与否的问题,随机猜测可以获 ...
- 角点检测和匹配——Harris算子
一.基本概念 角点corner:可以将角点看做两个边缘的交叉处,在两个方向上都有较大的变化.具体可由下图中分辨出来: 兴趣点interest point:兴趣点是图像中能够较鲁棒的检测出来的点,它不仅 ...
- OpenCV教程(43) harris角的检测(1)
计算机视觉中,我们经常要匹配两幅图像.匹配的的方式就是通过比较两幅图像中的公共特征,比如边,角,以及图像块(blob)等,来对两幅图像进行匹配. 相对于边,角更适合描述图像特征, ...
- OpenCV——Harris、Shi Tomas、自定义、亚像素角点检测
#include <opencv2/opencv.hpp> #include <iostream> using namespace cv; using namespace st ...
随机推荐
- rsyslog imfile 模块说明
stop() { echo -n $"Shutting down system logger: " killproc -p "${PIDFILE}" -d 30 ...
- Linux企业级项目实践之网络爬虫(28)——爬虫socket处理
Socket是进程之间交换数据的机制.这些进程即可以是同一台机器上的,也可以是通过网络连接起来的不同机器.一旦一个Socket连接建立,那么数据就能够双向传输,直到其中一端关闭连接. 通常,请求数据的 ...
- 高性能Java解析器实现过程详解
如果你没有指定数据或语言标准的或开源的Java解析器, 可能经常要用Java实现你自己的数据或语言解析器.或者,可能有很多解析器可选,但是要么太慢,要么太耗内存,或者没有你需要的特定功能.或者开源解析 ...
- spark1.1.0部署standalone分布式集群
配置三个节点的spark集群,集群模式为standalone模式,其中sp1节点作为主节点,sp2节点和sp3节点为从节点.***注意所有操作均为root用户. 创建3个CentOS虚拟机,如下: s ...
- P - Atlantis - hdu1542(求面积)
题意:rt 求面积......不计算重复面积(废话..)hdu1255 的弱化版,应该先做这道题在做那道题的. ******************************************** ...
- Apache Hadoop最佳实践和反模式
摘要:本文介绍了在Apache Hadoop上运行应用程序的最佳实践,实际上,我们引入了网格模式(Grid Pattern)的概念,它和设计模式类似,它代表运行在网格(Grid)上的应用程序的可复用解 ...
- wsdl文件结构分析
WSDL (Web Services Description Language,Web服务描述语言)是一种XML Application,他将Web服务描述定义为一组服务访问点,客户端可以通过这些服务 ...
- C++基础学习笔记----第十三课(操作符重载-下)
本节主要讲使用成员函数重载操作符,包括[],=,(),->四种操作符的重载以及&&和||的问题. 类的成员函数进行操作符重载 基本概念 类的成员函数也可以进行操作符的重载.类的普 ...
- Grails教程
1简介- Reference DocumentationVersion:null Table of Contents 1.1Grails 2.0有那些新特性?1.1.1面向开发的特性1.1.2核心特性 ...
- 关于kendo ui的使用改变颜色方式
1.概述: 在网上kendo ui教程中示例在演示的时候引用的css样式为kendo.common.min.css与kendo.default.min.css这两个外部样式,大家有没有发现,这两个样式 ...