VDB R&D
VDB Data value visualize: 结论从houdini得知.
API常用文字:
interior:内部
Narrow-band:窄带
background:窄带外
SDF: XY plane Data visualize:
{
(1)用法:vdb sdf levelset球,采样其体素值到对应的点位置的颜色观察。houdini节点vdb from polygons(参数上Exterior band voxels:3,Interior band voxels:3)没有开启Fill interior
则形成体素值:
interior是-0.3 (这个值是由Interior band voxels:3 得到)
Narrow-band: 从interior到narrow-band方向:-0.3 到 0
background:从narrow-band到background方向:0.3 (Exterior band voxels:3)
(2)用法:
假如要让interior成为一个梯度值,而不是恒定值,houdini做了一个牛逼的按钮,Fill interior.
interior里的体素值立马成为梯度的,大概是从-3.73过渡到narrow-band
}
FOG Volume: XY plane Data visualize:
{
(1) 普通不勾选fill interior:
interior是1
Narrow-band: 从interior到narrow-band方向:1 到 0
background:从narrow-band到background方向:0
(2) 勾选fill interior:
interior到narrow-band方向从1->0.3有个过渡
Narrow-band: 从interior到narrow-band方向:0.3 到 0
background:从narrow-band到background方向:0
}
==================================================================START======================================================
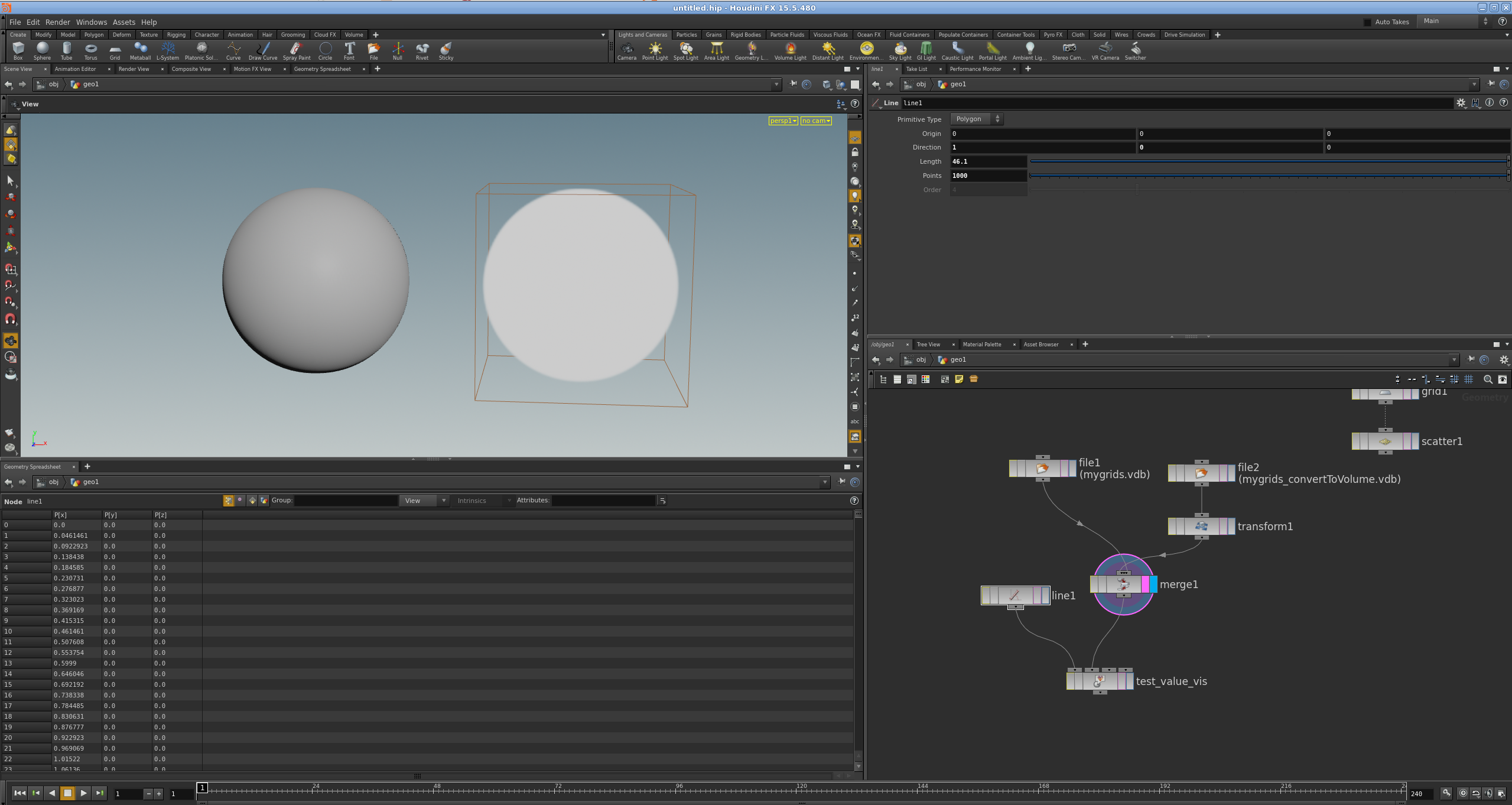
<1> ,make vdb sphere,and convert to volume
- #include <openvdb/openvdb.h>
- #include <openvdb/tools/LevelSetSphere.h>
- using namespace std;
- // Populate the given grid with a narrow-band level set representation of a sphere.
- // The width of the narrow band is determined by the grid's background value.
- // (Example code only; use tools::createSphereSDF() in production.)
- template<class GridType>
- void
- static makeSphere(GridType& grid, float radius, const openvdb::Vec3f& c)
- {
- typedef typename GridType::ValueType ValueT;
- // Distance value for the constant region exterior to the narrow band
- const ValueT outside = grid.background();
- // Distance value for the constant region interior to the narrow band
- // (by convention, the signed distance is negative in the interior of
- // a level set)
- const ValueT inside = -outside;
- // Use the background value as the width in voxels of the narrow band.
- // (The narrow band is centered on the surface of the sphere, which
- // has distance 0.)
- int padding = int(openvdb::math::RoundUp(openvdb::math::Abs(outside)));
- // The bounding box of the narrow band is 2*dim voxels on a side.
- int dim = int(radius + padding);
- // Get a voxel accessor.
- typename GridType::Accessor accessor = grid.getAccessor();
- // Compute the signed distance from the surface of the sphere of each
- // voxel within the bounding box and insert the value into the grid
- // if it is smaller in magnitude than the background value.
- openvdb::Coord ijk;
- int &i = ijk[];
- int &j = ijk[];
- int &k = ijk[];
- for (i = c[] - dim; i < c[] + dim; ++i) {
- const float x2 = openvdb::math::Pow2(i - c[]);
- for (j = c[] - dim; j < c[] + dim; ++j) {
- const float x2y2 = openvdb::math::Pow2(j - c[]) + x2;
- for (k = c[] - dim; k < c[] + dim; ++k) {
- // The distance from the sphere surface in voxels
- const float dist = openvdb::math::Sqrt(x2y2
- + openvdb::math::Pow2(k - c[])) - radius;
- // Convert the floating-point distance to the grid's value type.
- ValueT val = ValueT(dist);
- // Only insert distances that are smaller in magnitude than
- // the background value.
- if (val < inside || outside < val) continue;
- // Set the distance for voxel (i,j,k).
- accessor.setValue(ijk, val);
- }
- }
- }
- // Propagate the outside/inside sign information from the narrow band
- // throughout the grid.
- openvdb::tools::signedFloodFill(grid.tree());
- }
- template <class T>
- static void convertToVolume(T &grid)
- {
- // Convert the level set sphere to a narrow-band fog volume, in which
- // interior voxels have value 1, exterior voxels have value 0, and
- // narrow-band voxels have values varying linearly from 0 to 1.
- const float outside = grid->background();
- const float width = 2.0 * outside;
- // Visit and update all of the grid's active values, which correspond to
- // voxels on the narrow band.
- for (openvdb::FloatGrid::ValueOnIter iter = grid->beginValueOn(); iter; ++iter) {
- float dist = iter.getValue();
- iter.setValue((outside - dist) / width);
- }
- // Visit all of the grid's inactive tile and voxel values and update the values
- // that correspond to the interior region.
- for (openvdb::FloatGrid::ValueOffIter iter = grid->beginValueOff(); iter; ++iter) {
- if (iter.getValue() < 0.0) {
- iter.setValue(1.0);
- iter.setValueOff();
- } else{
- iter.setValue();
- iter.setValueOff();
- }
- }
- }
- int main()
- {
- openvdb::initialize();
- // Create a shared pointer to a newly-allocated grid of a built-in type:
- // in this case, a FloatGrid, which stores one single-precision floating point
- // value per voxel. Other built-in grid types include BoolGrid, DoubleGrid,
- // Int32Grid and Vec3SGrid (see openvdb.h for the complete list).
- // The grid comprises a sparse tree representation of voxel data,
- // user-supplied metadata and a voxel space to world space transform,
- // which defaults to the identity transform.
- openvdb::FloatGrid::Ptr grid =
- openvdb::FloatGrid::create(/*background value=*/2.0);
- // Populate the grid with a sparse, narrow-band level set representation
- // of a sphere with radius 50 voxels, located at (1.5, 2, 3) in index space.
- makeSphere(*grid, /*radius=*/50.0, /*center=*/openvdb::Vec3f(1.5, , ));
- // Associate some metadata with the grid.
- grid->insertMeta("radius", openvdb::FloatMetadata(50.0));
- // Associate a scaling transform with the grid that sets the voxel size
- // to 0.5 units in world space.
- grid->setTransform(
- openvdb::math::Transform::createLinearTransform(/*voxel size=*/0.5));
- // Identify the grid as a level set.
- grid->setGridClass(openvdb::GRID_LEVEL_SET);
- //grid->setGridClass(openvdb::GRID_FOG_VOLUME);
- // Name the grid "LevelSetSphere".
- grid->setName("LevelSetSphere");
- // Create a VDB file object.
- openvdb::io::File file("mygrids.vdb");
- // Add the grid pointer to a container.
- openvdb::GridPtrVec grids;
- // Write out the contents of the container.
- grids.push_back(grid);
- file.write(grids);
- file.close();
- // ============================================================= convert level set sphere to a fog volume sphere =====================================================
- std::cout << "read a new sdf volume and change it to fog\n";
- openvdb::io::File readFile("mygrids.vdb");
- readFile.open();
- openvdb::GridBase::Ptr readGrid;
- for(openvdb::io::File::NameIterator nameIter = readFile.beginName();nameIter!=readFile.endName();++nameIter)
- {
- if(nameIter.gridName() == "LevelSetSphere")
- {
- readGrid = readFile.readGrid(nameIter.gridName());
- } else
- {
- std::cout << "skip other grid modifile " << nameIter.gridName() <<std::endl;
- }
- }
- openvdb::FloatGrid::Ptr cast_grid = openvdb::gridPtrCast<openvdb::FloatGrid>(readGrid);
- cast_grid->setGridClass(openvdb::GRID_FOG_VOLUME);
- readFile.close();
- convertToVolume(cast_grid);
- openvdb::GridPtrVec WM_grids;
- WM_grids.push_back(cast_grid);
- openvdb::io::File WM_file("mygrids_convertToVolume.vdb");
- WM_file.write(WM_grids);
- WM_file.close();
- return ;
- }
<2> vdb from particles
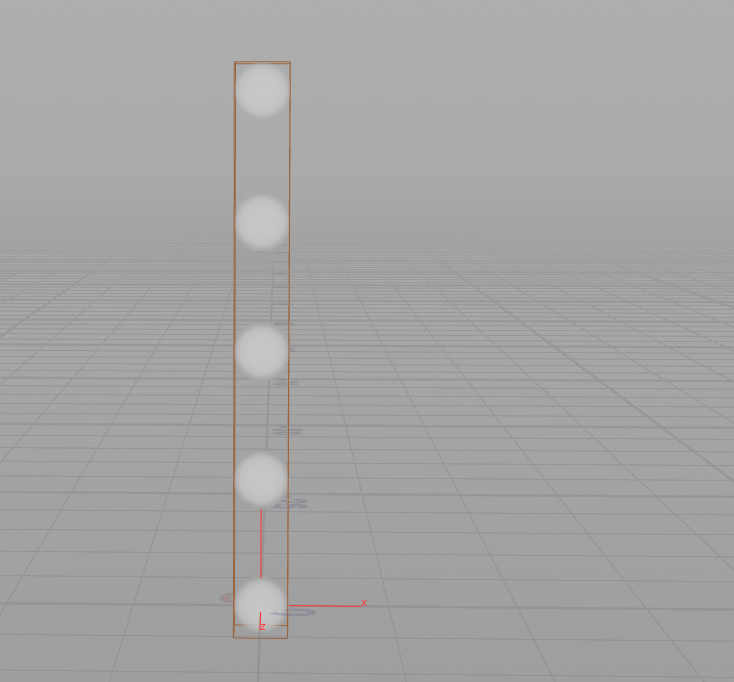
主要观察粒子的density,velocity
#include <openvdb/openvdb.h>
#include <openvdb/tools/ParticlesToLevelSet.h>
#include <iostream>
#include <vector>
- struct MyParticle
- {
- openvdb::Vec3R p, v;
- openvdb::Real r;
- };
- class MyParticleList
- {
- // change protected to the public,direct find the mRadiusScale,mVelocityScale
- public:
- openvdb::Real mRadiusScale;
- openvdb::Real mVelocityScale;
- std::vector<MyParticle> mParticleList;
- public:
- std::vector<MyParticle> &get_mPartcileList()
- {
- return mParticleList;
- }
- public:
- typedef openvdb::Vec3R PosType;
- MyParticleList(openvdb::Real rScale=, openvdb::Real vScale=)
- : mRadiusScale(rScale), mVelocityScale(vScale) {}
- void add(const openvdb::Vec3R &p, const openvdb::Real &r,
- const openvdb::Vec3R &v=openvdb::Vec3R(,,))
- {
- MyParticle pa;
- pa.p = p;
- pa.r = r;
- pa.v = v;
- mParticleList.push_back(pa);
- }
- /// @return coordinate bbox in the space of the specified transfrom
- openvdb::CoordBBox getBBox(const openvdb::GridBase& grid) {
- openvdb::CoordBBox bbox;
- openvdb::Coord &min= bbox.min(), &max = bbox.max();
- openvdb::Vec3R pos;
- openvdb::Real rad, invDx = /grid.voxelSize()[];
- for (size_t n=, e=this->size(); n<e; ++n) {
- this->getPosRad(n, pos, rad);
- const openvdb::Vec3d xyz = grid.worldToIndex(pos);
- const openvdb::Real r = rad * invDx;
- for (int i=; i<; ++i) {
- min[i] = openvdb::math::Min(min[i], openvdb::math::Floor(xyz[i] - r));
- max[i] = openvdb::math::Max(max[i], openvdb::math::Ceil( xyz[i] + r));
- }
- }
- return bbox;
- }
- //typedef int AttributeType;
- // The methods below are only required for the unit-tests
- openvdb::Vec3R pos(int n) const {return mParticleList[n].p;}
- openvdb::Vec3R vel(int n) const {return mVelocityScale*mParticleList[n].v;}
- openvdb::Real radius(int n) const {return mRadiusScale*mParticleList[n].r;}
- //////////////////////////////////////////////////////////////////////////////
- /// The methods below are the only ones required by tools::ParticleToLevelSet
- /// @note We return by value since the radius and velocities are modified
- /// by the scaling factors! Also these methods are all assumed to
- /// be thread-safe.
- /// Return the total number of particles in list.
- /// Always required!
- size_t size() const { return mParticleList.size(); }
- /// Get the world space position of n'th particle.
- /// Required by ParticledToLevelSet::rasterizeSphere(*this,radius).
- void getPos(size_t n, openvdb::Vec3R&pos) const { pos = mParticleList[n].p; }
- void getPosRad(size_t n, openvdb::Vec3R& pos, openvdb::Real& rad) const {
- pos = mParticleList[n].p;
- rad = mRadiusScale*mParticleList[n].r;
- }
- void getPosRadVel(size_t n, openvdb::Vec3R& pos, openvdb::Real& rad, openvdb::Vec3R& vel) const {
- pos = mParticleList[n].p;
- rad = mRadiusScale*mParticleList[n].r;
- vel = mVelocityScale*mParticleList[n].v;
- }
- // The method below is only required for attribute transfer
- void getAtt(size_t n, openvdb::Index32& att) const { att = openvdb::Index32(n); }
- };
Particles IO
Buiding the density,and write it out.
- int main()
- {
- const float voxelSize = 0.2f, halfWidth = 2.0f;
- openvdb::FloatGrid::Ptr density_grid = openvdb::createLevelSet<openvdb::FloatGrid>(voxelSize, halfWidth);
- MyParticleList pa(,); // this multiply is radius scale , velocity scale
- // This particle radius = 1 < 1.5 i.e. it's below the Nyquist frequency and hence ignored
- pa.add(openvdb::Vec3R( , , ), , openvdb::Vec3R( , , ));
- pa.add(openvdb::Vec3R( , , ), , openvdb::Vec3R( , , ));
- pa.add(openvdb::Vec3R( , , ), , openvdb::Vec3R( , , ));
- pa.add(openvdb::Vec3R( , , ), , openvdb::Vec3R( , , ));
- pa.add(openvdb::Vec3R( , , ), , openvdb::Vec3R( , , ));
- openvdb::tools::ParticlesToLevelSet<openvdb::FloatGrid> raster(*density_grid);
- raster.rasterizeTrails(pa, 0.75);//scale offset between two instances
- // always prune to produce a valid narrow-band level set.
- raster.finalize(true);
- density_grid->setGridClass(openvdb::GRID_LEVEL_SET);
- density_grid->setName("density");
- convertToVolume(density_grid);
- // Create a VDB file object.
- openvdb::io::File file("mygrids.vdb");
- // Add the grid pointer to a container.
- openvdb::GridPtrVec grids;
- grids.push_back(density_grid);
- // Write out the contents of the container.
- file.write(grids);
- file.close();
- }
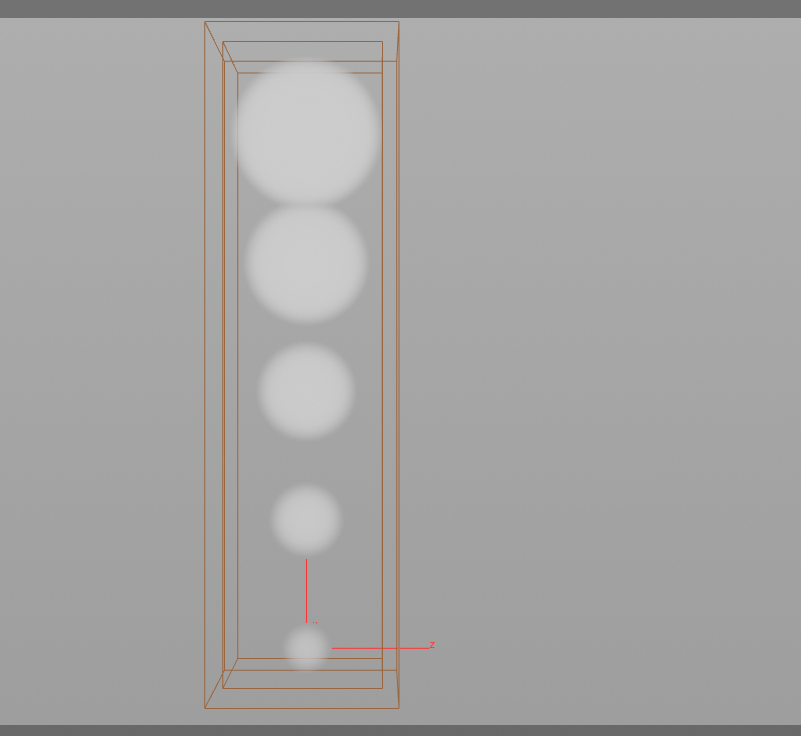
particles to volume
一个更好的方法Buiding the density.and write it out
- // Note densityGrid allocation memory in this function and transform same as densityGrid
- void buildingDensityGrid(openvdb::FloatGrid::Ptr &densityGrid,
- openvdb::math::Transform::Ptr &transform,MyParticleList &pa,bool isRasterToSphere = true)
- {
- float backGround = 0.1f;
- float voxelSize = 0.1;
- transform = openvdb::math::Transform::createLinearTransform(voxelSize);
- densityGrid = openvdb::FloatGrid::create(backGround);
- std::cout << "set density grid class type\n";
- densityGrid->setGridClass(openvdb::GRID_LEVEL_SET);
- densityGrid->setTransform(transform);
- openvdb::tools::ParticlesToLevelSet<openvdb::FloatGrid> raster(*densityGrid);
- if(isRasterToSphere)
- {
- raster.rasterizeSpheres(pa,pa.mRadiusScale);
- } else{
- raster.rasterizeTrails(pa,0.75);
- }
- raster.finalize(true);
- std::cout << "raster to end\n";
- }
- int main()
- {
- MyParticleList pa(,);
- pa.add(openvdb::Vec3R( , , ), , openvdb::Vec3R( , , ));
- pa.add(openvdb::Vec3R( , , ), , openvdb::Vec3R( , , ));
- pa.add(openvdb::Vec3R( , , ), , openvdb::Vec3R( , , ));
- pa.add(openvdb::Vec3R( , , ), , openvdb::Vec3R( , , ));
- pa.add(openvdb::Vec3R( , , ), , openvdb::Vec3R( , , ));
- openvdb::FloatGrid::Ptr densityGrid;
- openvdb::math::Transform::Ptr transform;
- buildingDensityGrid(densityGrid,transform,pa);
- densityGrid->setName("density");
- convertToVolume(densityGrid);
- // Create a VDB file object.
- std::cout << "write vdb \n";
- openvdb::io::File file("mygrids.vdb");
- // Add the grid pointer to a container.
- openvdb::GridPtrVec grids;
- grids.push_back(densityGrid);
- // Write out the contents of the container.
- file.write(grids);
- file.close();
- }
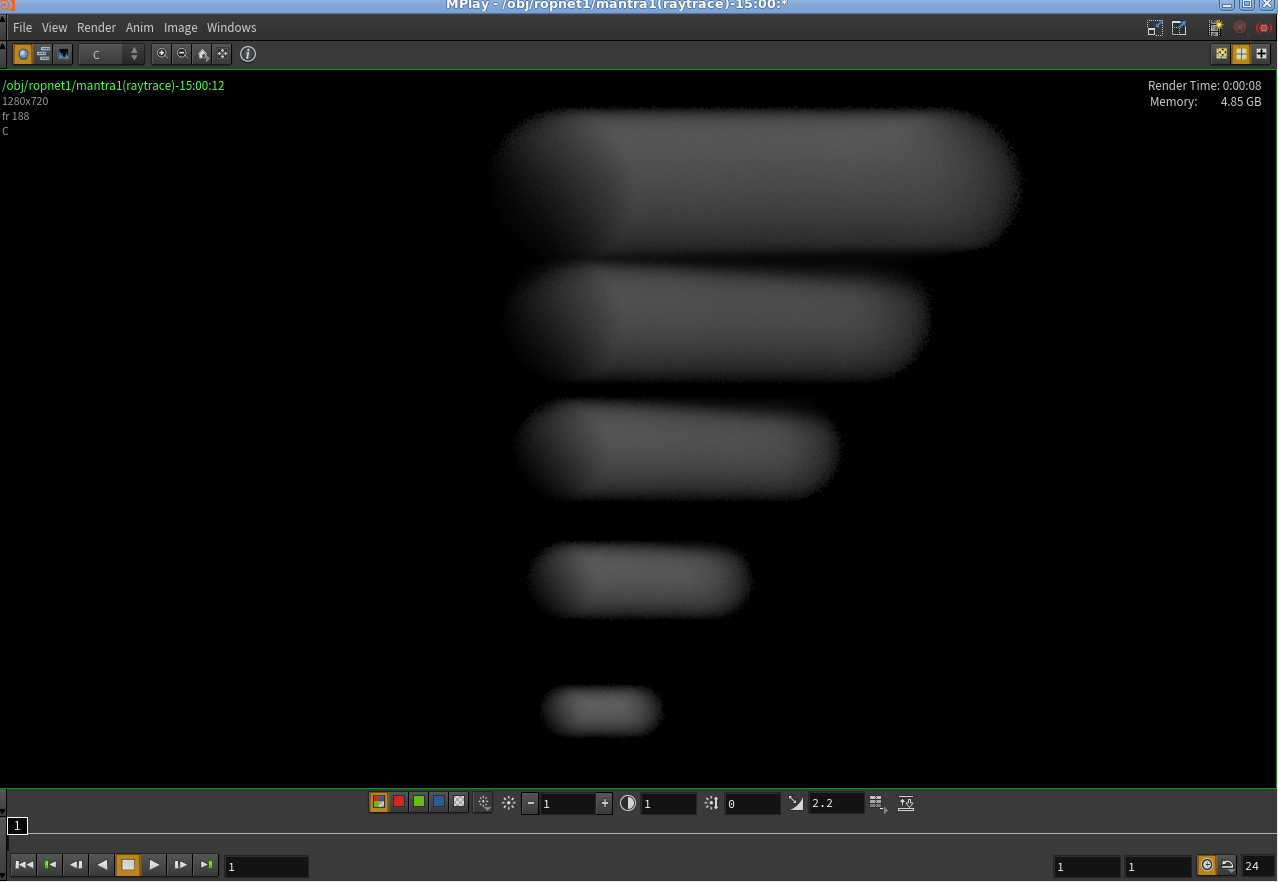
接下来VelocityBuilding,直接写了个包裹库,并且在houdini测试了下openvdb::Vec3sGrid的运动模糊。
GLY_OpenVdbWrapper.h
- //
- // Created by gearslogy on 4/13/17.
- //
- #ifndef ARNOLDVDBPOINTS_GLY_OPENVDBWAPPER_H
- #define ARNOLDVDBPOINTS_GLY_OPENVDBWAPPER_H
- #include <memory>
- #include <openvdb/openvdb.h>
- #include <openvdb/tools/ParticlesToLevelSet.h>
- #include <openvdb/tools/LevelSetUtil.h>
- #include <openvdb/tools/TopologyToLevelSet.h>
- // DEFINE OUR PARTICLES STRUCT
- namespace TopVertex
- {
- struct MyParticle
- {
- openvdb::Vec3R p, v;
- openvdb::Real r; // per particle has own radius
- };
- class MyParticleList
- {
- // change protected to the public,direct find the mRadiusScale,mVelocityScale
- public:
- openvdb::Real mRadiusScale;
- openvdb::Real mVelocityScale;
- std::vector<MyParticle> mParticleList;
- typedef openvdb::Vec3R PosType;
- MyParticleList(openvdb::Real rScale=, openvdb::Real vScale=)
- : mRadiusScale(rScale), mVelocityScale(vScale) {}
- void add(const openvdb::Vec3R &p, const openvdb::Real &r,
- const openvdb::Vec3R &v=openvdb::Vec3R(,,))
- {
- MyParticle pa;
- pa.p = p;
- pa.r = r;
- pa.v = v;
- mParticleList.push_back(pa);
- }
- /// @return coordinate bbox in the space of the specified transfrom
- openvdb::CoordBBox getBBox(const openvdb::GridBase& grid) {
- openvdb::CoordBBox bbox;
- openvdb::Coord &min= bbox.min(), &max = bbox.max();
- openvdb::Vec3R pos;
- openvdb::Real rad, invDx = /grid.voxelSize()[];
- for (size_t n=, e=this->size(); n<e; ++n) {
- this->getPosRad(n, pos, rad);
- const openvdb::Vec3d xyz = grid.worldToIndex(pos);
- const openvdb::Real r = rad * invDx;
- for (int i=; i<; ++i) {
- min[i] = openvdb::math::Min(min[i], openvdb::math::Floor(xyz[i] - r));
- max[i] = openvdb::math::Max(max[i], openvdb::math::Ceil( xyz[i] + r));
- }
- }
- return bbox;
- }
- //typedef int AttributeType;
- // The methods below are only required for the unit-tests
- openvdb::Vec3R pos(int n) const {return mParticleList[n].p;}
- openvdb::Vec3R vel(int n) const {return mVelocityScale*mParticleList[n].v;}
- openvdb::Real radius(int n) const {return mRadiusScale*mParticleList[n].r;}
- //////////////////////////////////////////////////////////////////////////////
- /// The methods below are the only ones required by tools::ParticleToLevelSet
- /// @note We return by value since the radius and velocities are modified
- /// by the scaling factors! Also these methods are all assumed to
- /// be thread-safe.
- /// Return the total number of particles in list.
- /// Always required!
- size_t size() const { return mParticleList.size(); }
- /// Get the world space position of n'th particle.
- /// Required by ParticledToLevelSet::rasterizeSphere(*this,radius).
- void getPos(size_t n, openvdb::Vec3R&pos) const { pos = mParticleList[n].p; }
- void getPosRad(size_t n, openvdb::Vec3R& pos, openvdb::Real& rad) const {
- pos = mParticleList[n].p;
- rad = mRadiusScale*mParticleList[n].r;
- }
- void getPosRadVel(size_t n, openvdb::Vec3R& pos, openvdb::Real& rad, openvdb::Vec3R& vel) const {
- pos = mParticleList[n].p;
- rad = mRadiusScale*mParticleList[n].r;
- vel = mVelocityScale*mParticleList[n].v;
- }
- // The method below is only required for attribute transfer
- void getAtt(size_t n, openvdb::Index32& att) const { att = openvdb::Index32(n); }
- };
- }
- //
- namespace TopVertex
- {
- class GLY_OpenVdbWrapper
- {
- public:
- // Rater point parm
- struct RasterParms
- {
- float backGround;
- float voxelSize;
- float halfWidth;
- };
- // define some variable type
- using Ptr = std::shared_ptr<GLY_OpenVdbWrapper>;
- using RasterT = openvdb::tools::ParticlesToLevelSet<openvdb::FloatGrid, openvdb::Index32>;
- enum POINT_RASTER_TYPE{RS_Sphere=0x0,RS_trailer=0x1};
- // define a static pointer to our class
- static GLY_OpenVdbWrapper* creator();
- //
- GLY_OpenVdbWrapper();
- ~GLY_OpenVdbWrapper();
- // SAMPLE POINTS API
- void samplePointsSetPoints(const std::vector<openvdb::Vec3R> &posList);
- void samplePointsSetPoints(double *array,int rawSize);
- void samplePointsSetRadius(double *array,int rawSize);
- void samplePointsSetRadius(const std::vector<openvdb::Real> &radiusList);
- void samplePointsSetVelocity(const std::vector<openvdb::Vec3R> &vel);
- void samplePointsSetVelocity(double *array,int rawsize);
- void samplePointsSetRadiusScale(double radius);
- void samplePointsSetVelocityScale(double v);
- void samplePointsAppendPoint(openvdb::Vec3R p,openvdb::Vec3R v,openvdb::Real radius);
- void samplePointsRasterDensityGrid(POINT_RASTER_TYPE type,openvdb::FloatGrid::Ptr &gridPtr,RasterParms &rasterParm);
- void samplePointsRasterVelocityGrid(openvdb::math::Transform::Ptr &density_transform,openvdb::Vec3SGrid::Ptr &velocityGrid);
- private:
- class SamplePoints;
- std::unique_ptr<SamplePoints> mPimplSamplePoints;
- };
- }
- #endif //ARNOLDVDBPOINTS_GLY_OPENVDBWAPPER_H
GLY_OpenVdbWrapper.cpp
- //
- // Created by gearslogy on 4/13/17.
- //
- #include "GLY_OpenVdbWrapper.h"
- #include <assert.h>
- #include <algorithm>
- using namespace TopVertex;
- //=======================================SamplePoints details=================================
- //
- class GLY_OpenVdbWrapper::SamplePoints
- {
- public:
- SamplePoints():mParticleListPtr(new MyParticleList(,))
- {
- }
- ~SamplePoints()
- {
- std::cout << "Release SamplePoints memory\n";
- }
- void setRadiusScale(double radius)
- {
- mParticleListPtr->mRadiusScale = radius;
- }
- void setVelocityScale(double v)
- {
- mParticleListPtr->mVelocityScale = v;
- }
- void setPoints(const std::vector<openvdb::Vec3R> &posList)
- {
- auto &pa = mParticleListPtr->mParticleList;
- pa.resize(posList.size());
- for(int i=;i<posList.size();i++)
- {
- pa[i].p = posList[i];
- }
- }
- void setPoints(double *array,int rawsize)
- {
- assert(rawsize%==);
- auto &pa = mParticleListPtr->mParticleList;
- pa.resize(rawsize/);
- for(int i=;i<rawsize/;i++)
- {
- double x = array[i];
- double y = array[i+];
- double z = array[i+];
- auto t = openvdb::Vec3R(x,y,z);
- pa[i].p = t;
- }
- }
- void setRadius(const std::vector<openvdb::Real> &radiusList)
- {
- assert(radiusList.size()==mParticleListPtr->mParticleList.size());
- auto &pa = mParticleListPtr->mParticleList;
- for(int i=;i<pa.size();i++)
- {
- pa[i].r = radiusList[i];
- }
- }
- void setRadius(double *array,int pointsNum)
- {
- assert(pointsNum==mParticleListPtr->mParticleList.size());
- auto &pa = mParticleListPtr->mParticleList;
- for(int i=;i<pa.size();i++)
- {
- pa[i].r = array[i];
- }
- }
- void setVelocity(const std::vector<openvdb::Vec3R> &vel)
- {
- assert(vel.size() == mParticleListPtr->mParticleList.size());
- auto &pa = mParticleListPtr->mParticleList;
- for(int i=;i<vel.size();i++)
- {
- pa[i].v = vel[i];
- }
- }
- void setVelocity(double *array,int rawsize)
- {
- assert(rawsize%==);
- auto &pa = mParticleListPtr->mParticleList;
- for(int i=;i<rawsize/;i++)
- {
- double x = array[i];
- double y = array[i+];
- double z = array[i+];
- auto t = openvdb::Vec3R(x,y,z);
- pa[i].v = t;
- }
- }
- void appendPoint(openvdb::Vec3R p,openvdb::Vec3R v,openvdb::Real radius)
- {
- mParticleListPtr->add(p,radius,v);
- }
- void clearPoints(){mParticleListPtr->mParticleList.clear();}
- void rasterDensity(POINT_RASTER_TYPE type,openvdb::FloatGrid::Ptr &gridPtr,RasterParms &rasterParm)
- {
- std::cout << "Start process samplePoints Raster Density\n";
- float backGround = rasterParm.backGround;
- float voxelSize = rasterParm.voxelSize;
- float halfWidth = rasterParm.halfWidth;
- openvdb::math::Transform::Ptr transform = openvdb::math::Transform::createLinearTransform(voxelSize);
- //gridPtr = openvdb::FloatGrid::create(backGround); //this is simple and can work
- gridPtr = openvdb::createLevelSet<openvdb::FloatGrid>(voxelSize, halfWidth);
- gridPtr->setGridClass(openvdb::GRID_LEVEL_SET);
- gridPtr->setTransform(transform);
- openvdb::tools::ParticlesToLevelSet<openvdb::FloatGrid,openvdb::Index> raster(*gridPtr);
- if(type==0x0) // RS_Sphere
- {
- raster.rasterizeSpheres(*mParticleListPtr);
- } else
- {
- raster.rasterizeTrails(*mParticleListPtr,0.75);
- }
- raster.finalize(true);
- openvdb::tools::sdfToFogVolume(*gridPtr);
- gridPtr->setName("density");
- mId=raster.attributeGrid();
- }
- void rasterVelocityGrid(openvdb::math::Transform::Ptr &density_transform,openvdb::Vec3SGrid::Ptr &gridPtr)
- {
- typedef typename openvdb::Int32Grid::TreeType::ValueConverter<openvdb::Vec3s >::Type TreeTypeWarpVec;
- typedef typename openvdb::Grid<TreeTypeWarpVec> GridType;
- typename TreeTypeWarpVec::Ptr tree(
- new TreeTypeWarpVec(mId->tree(), openvdb::Vec3s(,,) , openvdb::TopologyCopy()));
- //typename GridType::Ptr velocity_grid(GridType::create(tree)); //为grid开辟内存*/
- gridPtr = openvdb::Vec3SGrid::create(tree);
- gridPtr->setVectorType(openvdb::VecType());
- // MY Method
- openvdb::Coord ijk;
- openvdb::Vec3SGrid::Accessor vel_accessor = gridPtr->getAccessor();
- for(auto iter = mId->beginValueOn();iter.test();++iter)
- {
- auto d = *iter;
- //std::cout << " D:..." <<d <<std::endl;
- ijk = iter.getCoord();
- openvdb::math::Vec3s vel = mParticleListPtr->vel(d);
- vel*=;
- vel_accessor.setValue(ijk,vel);
- }
- gridPtr->setName("vel");
- gridPtr->setTransform(density_transform);
- }
- private:
- std::unique_ptr<MyParticleList > mParticleListPtr;
- RasterT::AttGridType::Ptr mId; //remeber the id of point in voxel
- };
- //
- //============================================GLY_OpenVdbWrapper==================================================
- // GLY_OpenVdbWrapper Details
- GLY_OpenVdbWrapper::GLY_OpenVdbWrapper():mPimplSamplePoints(new GLY_OpenVdbWrapper::SamplePoints())
- {
- }
- GLY_OpenVdbWrapper::~GLY_OpenVdbWrapper()
- {
- std::cout << "Release Wrapper memory\n";
- }
- void GLY_OpenVdbWrapper::samplePointsSetPoints(const std::vector<openvdb::Vec3R> &posList)
- {
- mPimplSamplePoints->setPoints(posList);
- }
- void GLY_OpenVdbWrapper::samplePointsSetPoints(double *array,int rawSize)
- {
- mPimplSamplePoints->setPoints(array,rawSize);
- }
- void GLY_OpenVdbWrapper::samplePointsSetRadius(double *array, int rawSize) {
- mPimplSamplePoints->setRadius(array,rawSize);
- }
- void GLY_OpenVdbWrapper::samplePointsSetRadius(const std::vector<openvdb::Real> &radiusList) {
- mPimplSamplePoints->setRadius(radiusList);
- }
- void GLY_OpenVdbWrapper::samplePointsSetVelocity(const std::vector<openvdb::Vec3R> &vel) {
- mPimplSamplePoints->setVelocity(vel);
- }
- void GLY_OpenVdbWrapper::samplePointsSetVelocity(double *array, int rawsize) {
- mPimplSamplePoints->setVelocity(array,rawsize);
- }
- void GLY_OpenVdbWrapper::samplePointsSetRadiusScale(double radius) {
- mPimplSamplePoints->setRadiusScale(radius);
- }
- void GLY_OpenVdbWrapper::samplePointsSetVelocityScale(double v) {
- mPimplSamplePoints->setVelocityScale(v);
- }
- void GLY_OpenVdbWrapper::samplePointsAppendPoint(openvdb::Vec3R p, openvdb::Vec3R v, openvdb::Real radius)
- {
- mPimplSamplePoints->appendPoint(p,v,radius);
- }
- GLY_OpenVdbWrapper* GLY_OpenVdbWrapper::creator() {
- return new GLY_OpenVdbWrapper;
- }
- void GLY_OpenVdbWrapper::samplePointsRasterDensityGrid(POINT_RASTER_TYPE type, openvdb::FloatGrid::Ptr &gridPtr,
- RasterParms &rasterParm) {
- mPimplSamplePoints->rasterDensity(type,gridPtr,rasterParm);
- }
- void GLY_OpenVdbWrapper::samplePointsRasterVelocityGrid(openvdb::math::Transform::Ptr &density_transform,
- openvdb::Vec3SGrid::Ptr &velocityGrid)
- {
- mPimplSamplePoints->rasterVelocityGrid(density_transform,velocityGrid);
- }
main.cpp:
- //
- // Created by gearslogy on 4/14/17.
- //
- #include "GLY_OpenVdbWrapper.h"
- using namespace std;
- using namespace TopVertex;
- int main()
- {
- GLY_OpenVdbWrapper::Ptr wrapper(GLY_OpenVdbWrapper::creator());
- wrapper->samplePointsAppendPoint(openvdb::Vec3R(, , ), openvdb::Vec3R( , , ) ,);
- wrapper->samplePointsAppendPoint(openvdb::Vec3R(, , ), openvdb::Vec3R( , , ) ,1.5);
- wrapper->samplePointsAppendPoint(openvdb::Vec3R(, , ), openvdb::Vec3R( , , ) ,2.0);
- wrapper->samplePointsAppendPoint(openvdb::Vec3R(, , ), openvdb::Vec3R( , , ) ,2.5);
- wrapper->samplePointsAppendPoint(openvdb::Vec3R(, , ), openvdb::Vec3R( , , ) ,3.0);
- // create grid named "density"
- openvdb::FloatGrid::Ptr densityGrid;
- GLY_OpenVdbWrapper::RasterParms parms;
- parms.backGround = 0.1;
- parms.voxelSize = 0.1;
- parms.halfWidth = 0.5;
- wrapper->samplePointsRasterDensityGrid(GLY_OpenVdbWrapper::RS_Sphere,densityGrid,parms);
- // Create velocity Grid "velocity"
- openvdb::Vec3SGrid::Ptr velocityGrid;
- auto densityTransform = densityGrid->transformPtr();
- wrapper->samplePointsRasterVelocityGrid(densityTransform,velocityGrid);
- // IO Operator
- openvdb::io::File file("mygrids.vdb");
- openvdb::GridPtrVec grids;
- grids.push_back(densityGrid);
- grids.push_back(velocityGrid);
- file.write(grids);
- file.close();
- }
Test plugin for katana:
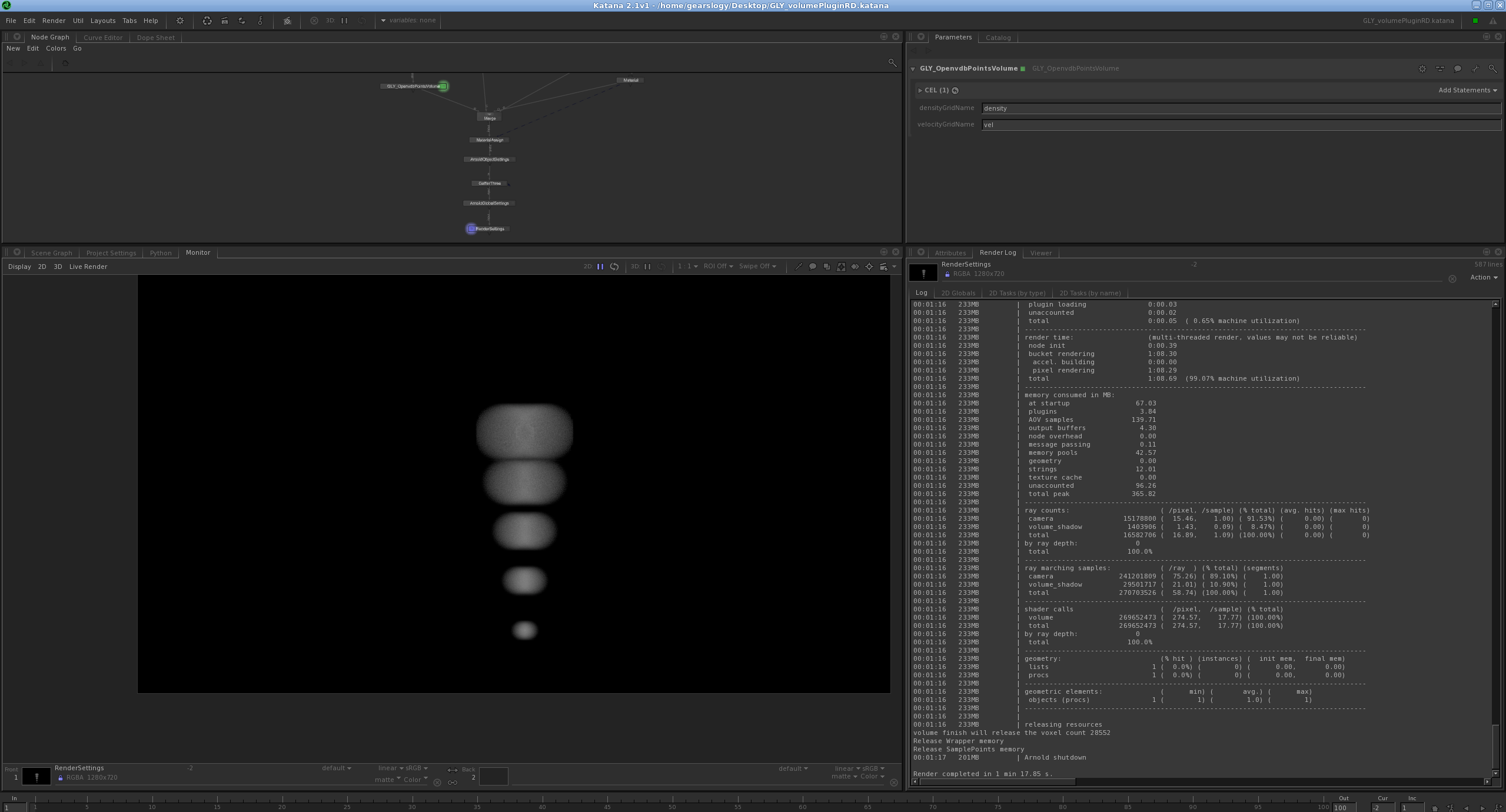
Update katana plugin:
升级了光线求交,直接快的飞起来
Arnold粒子体积渲染(Arnold particles volume rendering):
插件loading模式:AlembicAPI->OpenvdbAPI->ArnoldAPI
然后KatanaAPI再写个插件 读取这个ArnoldAPI写出来的proc,

update volume:
重要的事情不说两遍,static 关键字在一个so上被一个进程,2个instance调用,全局的static object内存地址是他妈一样的,也就是说是共享的地址。会导致你假如创建两个instance,你却希望有两份不一样的全局变量内容,结果,太感人了,确实是错的,是一样的。
如果独立进程,独立instance调用so上的全局变量,ok没问题。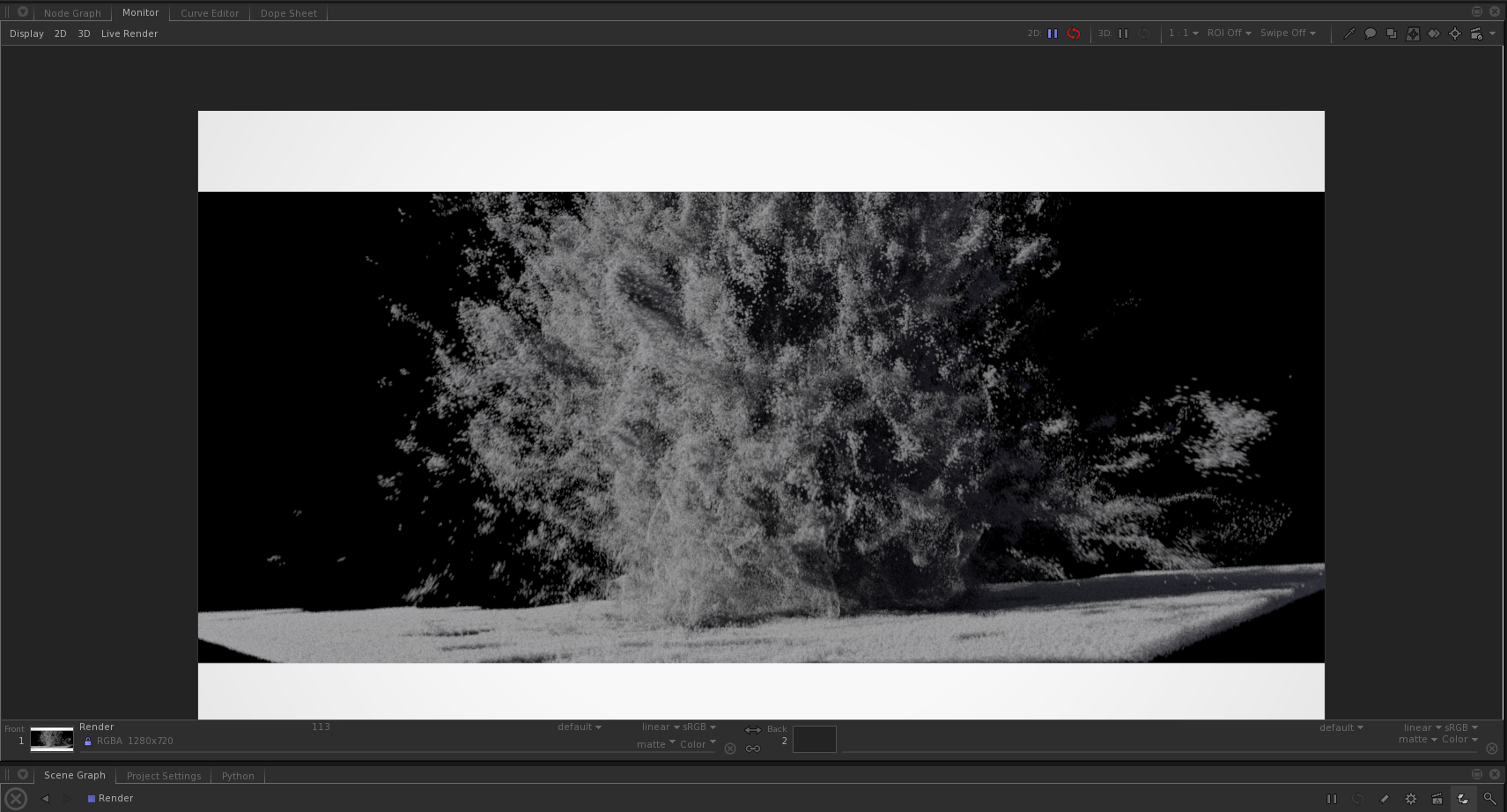
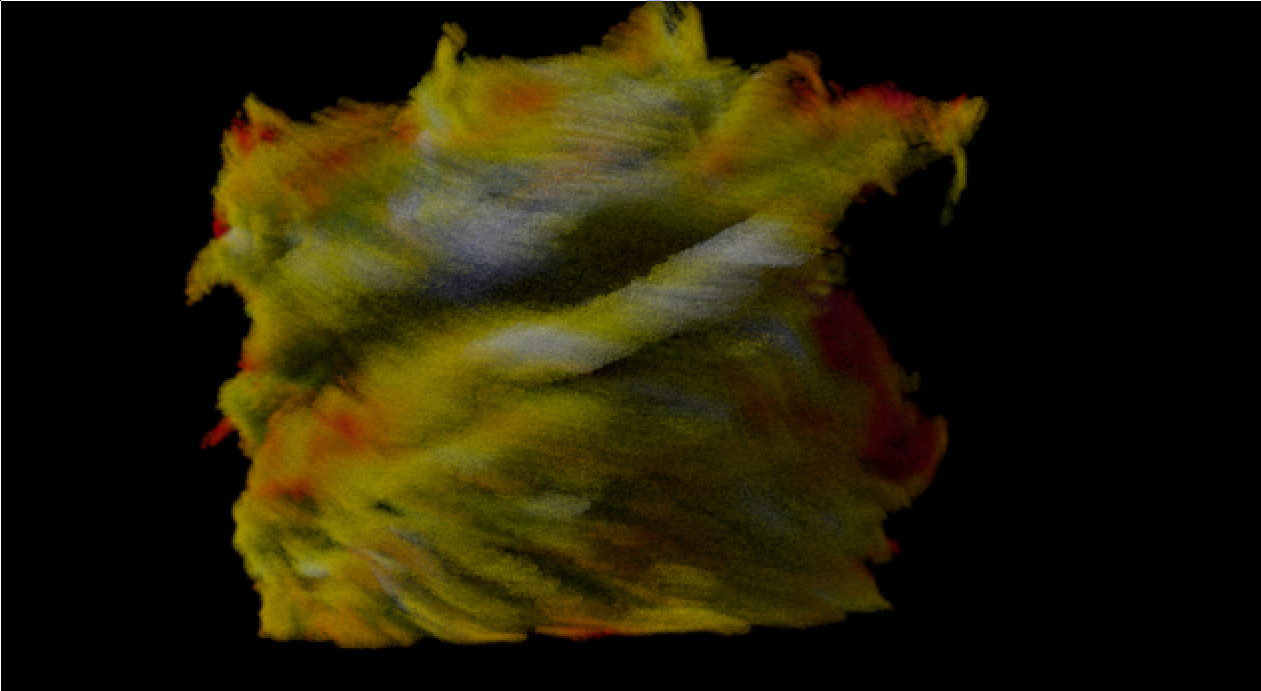
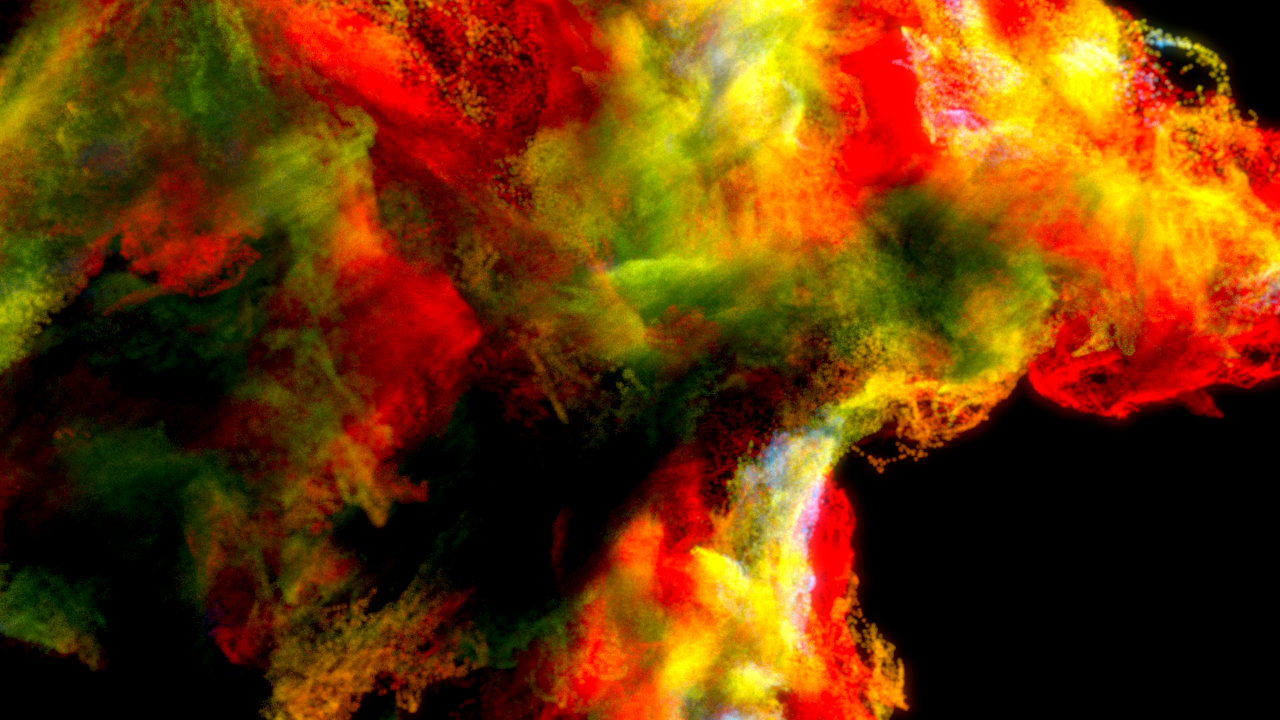
Rendering the cd field:
VDB R&D的更多相关文章
- openstack搭建之-cinder配置(12)
一. base节点配置 mysql -u root -proot CREATE DATABASE cinder; GRANT ALL PRIVILEGES ON cinder.* TO 'cinder ...
- openstack实验环境搭建
Openstack实验文档 一.base节点 1.1配置网络 vim /etc/sysconfig/network-scripts/ifcfg-eth0 1.2关闭防火墙和selinux system ...
- S1_搭建分布式OpenStack集群_10 cinder 存储节点配置
一.安装配置lvm2安装LVM包:# yum install -y lvm2 启动LVM元数据服务,并将其配置为在系统启动时启动:# systemctl enable lvm2-lvmetad.ser ...
- [原]CentOS7安装Rancher2.1并部署kubernetes (二)---部署kubernetes
################## Rancher v2.1.7 + Kubernetes 1.13.4 ################ ##################### ...
- 利用python进行数据分析2_数据采集与操作
txt_filename = './files/python_baidu.txt' # 打开文件 file_obj = open(txt_filename, 'r', encoding='utf-8' ...
- Django项目:CRM(客户关系管理系统)--81--71PerfectCRM实现CRM项目首页
{#portal.html#} {## ————————46PerfectCRM实现登陆后页面才能访问————————#} {#{% extends 'king_admin/table_index.h ...
- 【翻译】Awesome R资源大全中文版来了,全球最火的R工具包一网打尽,超过300+工具,还在等什么?
0.前言 虽然很早就知道R被微软收购,也很早知道R在统计分析处理方面很强大,开始一直没有行动过...直到 直到12月初在微软技术大会,看到我软的工程师演示R的使用,我就震惊了,然后最近在网上到处了解和 ...
- 应用r.js来优化你的前端
r.js是requireJS的优化(Optimizer)工具,可以实现前端文件的压缩与合并,在requireJS异步按需加载的基础上进一步提供前端优化,减小前端文件大小.减少对服务器的文件请求.要使用 ...
- 使用R画地图数据
用R画地图数据 首先,从这里下载中国地图的GIS数据,这是一个压缩包,完全解压后包含三个文件(bou2_4p.dbf.bou2_4p.shp和bou2_4p.shx),将这三个文件解压到同一个目录下. ...
随机推荐
- BZOJ2815 拓扑排序 + LCA
https://www.lydsy.com/JudgeOnline/problem.php?id=2815 作为一个DAG图,结点之间又有这么明显的等级之分,很容易想到的是拓扑排序. 但是不管是正向的 ...
- MySQL数据库优化_索引
1.添加索引后减少查询需要的行数,提高查询性能 (1) 建表 CREATE TABLE `site_user` ( `id` ) NOT NULL AUTO_INCREMENT COMMENT '自增 ...
- Kafka各个版本差异汇总
Kafka各个版本差异汇总 从0.8.x,0.9.x,0.10.0.x,0.10.1.x,0.10.2.x,0.11.0.x,1.0.x或1.1.x升级到2.0.0 Kafka 2.0.0引入了线 ...
- springMVC的全局拦截器
先说说为什么要使用springMVC的全局拦截器,比如 当我们在访问接口的时候,我们一般都会先判断这个用户是否登陆,我们就要在每个接口的前面都要判断一下,想想是不是很蛋疼,那工作量... 这时候,我们 ...
- MySQL数据类型1
1.float.double.decimal类型用法详解 三者的区别介绍 float:浮点型,含字节数为4,32bit,数值范围为-3.4E38~3.4E38(7个有效位) double:双精度实型, ...
- redis安全问题【原】
前提 假设redis安装在 IP 地址为 192.168.0.123 的linux服务器 . 我的本机Win10操作系统 IP地址为 192.168.0.45 , 有一套java客户端代码可调用lin ...
- 让Windows Server 2008r2 IIS7.5 ASP.NET 支持10万并发请求
由于之前使用的是默认配置,服务器最多只能处理5000个同时请求,今天下午由于某种情况造成同时请求超过5000,从而出现了上面的错误. 为了避免这样的错误,我们根据相关文档调整了设置,让服务器从设置上支 ...
- JAVA方法调用中的解析与分派
JAVA方法调用中的解析与分派 本文算是<深入理解JVM>的读书笔记,参考书中的相关代码示例,从字节码指令角度看看解析与分派的区别. 方法调用,其实就是要回答一个问题:JVM在执行一个方法 ...
- C#基础_MD5
MD5加密 1创建Md5 2.开始加密,需要将字符转换为字节数组 3.返回一个加密好的字节数组 4.将字节数组中每个元素按照指定的编码格式解析成字符串 1 static void Main(strin ...
- 【noip 2016】普及组
T1.买铅笔 题目链接 #include<cstdio> #include<algorithm> #include<cstring> using namespace ...