(一):细说贝叶斯滤波:Bayes filters
认知计算,还要从贝叶斯滤波的基本思想讲起,本文主要是对《Probabilistic Robotics》中贝叶斯滤波器部分的详细讲解。
这一部分,我们先回顾贝叶斯公式的数学基础,然后再来介绍贝叶斯滤波器。
(一). 概率基础回顾
我们先来回顾一下概率论里的基本知识:
1. \( X \): 表示一个随机变量,如果它有有限个可能的取值\( \{x_1, x_2, \cdots, x_n \} \).
2. \( p(X=x_i) \):表示变量\( X \)的值为 \( x_i \)的概率。
3. \( p(\cdot) \):称为概率质量函数(probability mass function).
例如:一个家里有3个房间,机器人在各个房间的概率为 \( p(room)=\{0.1, 0.3, 0.6\} \).
4. 如果\( X \)在连续空间取值,\( p(x) \)称为概率密度函数(probability density function),
$$p (x \in (a,b)) = \int\limits_a^b {p(x)dx} $$
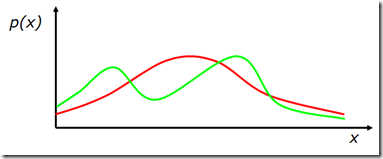
图1. 概率密度函数曲线示例
5. 联合概率:$ p(X=x ~~\textrm{and} ~~Y=y) = p(x,y) $,称为联合概率密度分布。如果$X$和$Y$是相互独立的随机变量,$p(x,y)=p(x)p(y)$。
6. 条件概率:$ p(X=x|Y=y) $ 是在已知$Y=y$的条件下,计算$X=x$的概率。
$$ p(x|y)=p(x,y)/p(y)$$
$$ p(x,y)=p(x|y)p(y)=p(y|x)p(x)$$
如果$x$和$y$相互独立,则:
$$ p(x|y)=p(x)$$
7. 全概率公式:
离散情况下:
$$p(x) = \sum\limits_y {p(x,y)}=\sum\limits_y {p(x|y)p(y)} $$
连续情况下:
$$p(x) = \int {p(x,y)\;dy} = \int {p(x|y)p(y)\;dy} $$
(二). 贝叶斯公式
2.1 贝叶斯公式
基于条件概率公式和全概率公式,我们可以导出贝叶斯公式:
$$\begin{array}{c}
P(x,y) = P(x|y)P(y) = P(y|x)P(x)\\
\Rightarrow \\
P(x\,\left| {\,y} \right.) = \frac{{P(y|x)\,\,P(x)}}{{P(y)}} = \frac{{{\textrm{causal knowledge}} \cdot {\textrm{prior knowledge}}}}{{{\textrm{prior knowledge}}}}
\end{array}$$
- 这里面$x$一般是某种状态;$y$一般是代表某种观测。
- 我们称${P(y|x)}$为causal knowledge,意即由$x$的已知情况,就可以推算$y$发生的概率,例如在图2的例子中,已知如果门开着,则$z=0.5m$的概率为0.6;如果门关着,则$z=0.5m$的的概率为0.3。
- 我们称${P(x)}$为prior knowledge,是对$x$的概率的先验知识。例如在图2的例子中,可设门开或关的概率各占$50\%$.
- ${P(x|y)}$是基于观测对状态的诊断或推断。贝叶斯公式的本质就是利用causal knowledge和prior knowledge来进行状态推断或推理。
例1: :
:
在图2所示的例子中,机器人根据观测的到门的距离,估算门开或关的概率,若测量到门的距离为$z=0.5m$,则可用条件概率描述门开着的概率:
$$P(\textrm{open}|z=0.6) = ?$$
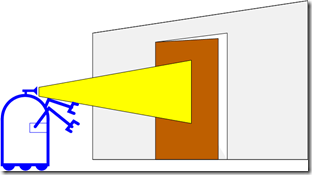
图 2.机器人根据观测计算门开或关的概率
$$\begin{array}{l}
P(open|z=0.5) = {\textstyle{{P(z|open)P(open)} \over {P(z)}}}{~~~~\rm{ <--贝叶斯公式 }}\\
= \frac{{P(z|open)P(open)}}{{P(z|open)p(open) + P(z|\neg open)p(\neg open)}}{~~~~\rm{ <--全概率公式 }}\\
= \frac{{0.6 \cdot 0.5}}{{0.6 \cdot 0.5 + 0.3 \cdot 0.5}} = 2/3
\end{array}$$
2.2 贝叶斯公式的计算
可以看到贝叶斯公式的分母项${P(y)}$,同${P(x|y)}$无关,所以可以把它作为归一化系数看待:
$$\begin{array}{l}
P(x\,\left| {\,y} \right.) = \frac{{P(y|x)\,\,P(x)}}{{P(y)}} = \eta \;P(y|x)\,P(x)\\
\eta = P{(y)^{ - 1}} = \frac{1}{{\sum\limits_x {P(y|x)} P(x)}}
\end{array}$$
所以基于causal knowledge和prior knowledge进行条件概率计算的过程如下:
Algorithm:
$\begin{array}{l}
\forall x:{\rm{au}}{{\rm{x}}_{x|y}} = P(y|x)\,\,P(x)\\
\eta = \frac{1}{{\sum\limits_x {{\rm{au}}{{\rm{x}}_{x|y}}} }}\\
\forall x:P(x|y) = \eta \;{\rm{au}}{{\rm{x}}_{x|y}}
\end{array}$
2.3 贝叶斯公式中融合多种观测
在很多应用问题中,我们会用多种观测信息对一个状态进行猜测和推理,贝叶斯公式中是如何融合多种观测的呢?
我们简单推导一下:
$$\begin{array}{l}
P(x|y,z){\rm{ = }}\frac{{P(x,y,z)}}{{P(y,z)}}\\
= \frac{{P(y|x,z)p(x,z)}}{{P(y,z)}}\\
= \frac{{P(y|x,z)p(x|z)p(z)}}{{P(y|z)p(z)}}\\
= \frac{{P(y|x,z)p(x|z)}}{{P(y|z)}}
\end{array}$$
所以有:
$$P(x|y,z) = \frac{{P(y|x,z)\,\,P(x|z)}}{{P(y|z)}}$$
2.4 贝叶斯递推公式
由此,我们来推导贝叶斯滤波的递推公式:
$P(x|z_1, \ldots ,z_n) =?$
我们把$z_n$看做$y$,把$z_1, \ldots, z_{n-1}$看做$z$,代入上面的公式:
$$P(x|z_1, \ldots ,z_n) = \frac{{P(z_n|x,z_1, \ldots ,z_{n – 1})\;P(x|z1, \ldots ,z_{n – 1})}}{{P(z_n|z_1, \ldots ,z_{n – 1})}}$$
再由Markov属性,在$x$已知的情况下,$z_n$同$\{z_1, \ldots ,z_{n – 1}\}$无关,所以:
$$\begin{array}{c}
P(x|z_1, \ldots ,z_n) = \frac{{P(z_n|x,z_1, \ldots ,z_{n – 1})\;P(x|z1, \ldots ,z_{n – 1})}}{{P(z_n|z_1, \ldots ,z_{n – 1})}}\\
=\frac{{P(z_n|x)\;P(x|z1, \ldots ,z_{n – 1})}}{{P(z_n|z_1, \ldots ,z_{n – 1})}}
\end{array}$$
从而我们得到贝叶斯的递推公式:
$$\begin{array}{*{20}{l}}
{P(x|{z_1}, \ldots ,{z_n})}&{ = \frac{{P({z_n}|x)\;P(x|{z_1}, \ldots ,{z_{n{\rm{ - }}1}})}}{{P({z_n}|{z_1}, \ldots ,{z_{n - 1}})}}}\\
{}&{ = {\eta _n}\;P({z_n}|x)\;P(x|{z_1}, \ldots ,{z_{n - 1}})}\\
{}&\begin{array}{l}
= {\eta _n}\;P({z_n}|x)\;{\eta _{n - 1}}P({z_{n - 1}}|x)P(x|{z_1}, \ldots ,{z_{n - 2}})\\
= {\eta _1} \cdots {\eta _n}\;\prod\limits_{i = 1...n} {P({z_i}|x)} \;P(x)
\end{array}
\end{array}$$
例2:在例1的基础上,如果机器人第二次测量到门的距离仍然为0.5米, 计算门开着的概率。
$\begin{array}{lllll}
P(open|{z_2},{z_1}) & = \;\;\frac{{P({z_2}|open)\;P(open|{z_1})}}{{P({z_2}|open)\;P(open|{z_1}) + P({z_2}|\neg open)\;P(\neg open|{z_1})}}\\
& = \;\;\frac{{0.6 \cdot \frac{2}{3}}}{{0.6 \cdot \frac{2}{3} + 0.3 \cdot \frac{1}{3}}}\;\; = \;\;\frac{{0.4}}{{0.5}}\;\; = \;\;0.8
\end{array}$
所以,第二次z=0.5m的观测增大了对门开着的概率的置信程度。
(三). 如何融入动作?
在实际问题中,对象总是处在一个动态变化的环境中,例如:
- 机器人自身的动作影响了环境状态
- 其它对象,比如人的动作影响了环境状态
- 或者就是简单的环境状态随着时间发生了变化。
如何在Bayes模型中来描述动作的影响呢?
- 首先,动作所带来的影响也总是具有不确定性的
- 其次,相比于观测,动作一般会使得对象的状态更为模糊(或更不确定)。
我们用$u$来描述动作,在$x'$状态下,执行了动作$u$之后,对象状态改变为$x$的概率表述为:
$$P(x|u,x’)$$
动作对状态的影响一般由状态转移模型来描述。如图3所示,表示了“关门”这个动作对状态影响的转移模型。这个状态转移模型表示:关门这个动作有0.1的失败概率,所以当门是open状态时,执行“关门”动作,门有0.9的概率转为closed状态,有0.1的概率保持在open状态。门是closed的状态下,执行“关门”动作,门仍然是关着的。
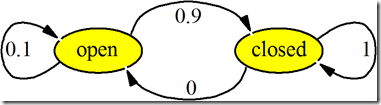
图3. “关门”动作的状态转移模型
执行某一动作后,计算动作后的状态概率,需要考虑动作之前的各种状态情况,把所有情况用全概率公式计算:
- 连续情况下:
$$P(x|u) = \int {P(x|u,x')P(x')dx'} $$
- 离散情况下:
$$P(x|u) = \sum {P(x|u,x')P(x')} $$
例3:在例2的基础上,如果按照图3所示的状态转移关系,机器人执行了一次关门动作, 计算动作后门开着的概率?
$$\begin{array}{lllll}
P(open|u) & = \sum {P(open|u,x')P(x')} \\
& \,\, = P(open|u,open)P(open)\\
& \quad + P(open|u,closed)P(closed)\\
& {\kern 1pt} \; = \frac{1}{{10}} * 0.8 + \frac{0}{1} * 0.2 = 0.08\\
\end{array}$$
$$\begin{array}{lllll}
P(closed|u) & = \sum {P(closed|u,x')P(x')} \\
& \,\, = P(closed|u,open)P(open)\\
& \quad + P(closed|u,closed)P(closed)\\
& {\kern 1pt} \; = \frac{9}{{10}} * 0.8 + \frac{1}{1} * 0.2 = 0.92
\end{array}$$
所以,执行一次关门动作后,门开着的概率变为了0.08.
(四). 贝叶斯滤波算法
4.1 算法设定
由上述推导和示例,我们可以给出贝叶斯滤波的算法,算法的输入输出设定如下。
- 系统输入
- 1到$t$时刻的状态观测和动作:${d_t} = \{ {u_1},{z_1}\; \ldots ,{u_t},{z_t}\} $
- 观测模型:$P(z|x)$
- 动作的状态转移模型:$P(x|u,x’)$
- 系统状态的先验概率分布$P(x)$.
- 期望输出
- 计算状态的后延概率,称为状态的置信概率:$Bel({x_t}) = P({x_t}|{u_1},{z_1}\; \ldots ,{u_t},{z_t})$
4.2 算法基本假设
贝叶斯滤波的基本假设:
1. Markov性假设: $t$时刻的状态由$t-1$时刻的状态和$t$时刻的动作决定。$t$时刻的观测仅同$t$时刻的状态相关,如图4所示:
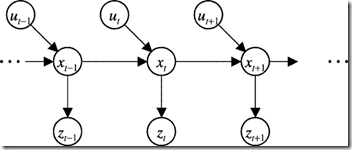
图4. Markov模型
$p({z_t}|{x_{0:t}},{z_{1:t}},{u_{1:t}})\,\,\, = \,\,\,p({z_t}|{x_t})$
$p({x_t}|{x_{1:t - 1}},{z_{1:t}},{u_{1:t}})\,\,\, = \,\,\,p({x_t}|{x_{t - 1}},{u_t})$
2. 静态环境,即对象周边的环境假设是不变的
3. 观测噪声、模型噪声等是相互独立的
4.3 Bayes滤波算法
基于上述设定和假设,我们给出贝叶斯滤波算法的推导过程:
$Bel({x_t}) = P({x_t}|{u_1},{z_1}\; \ldots ,{u_t},{z_t})$
$ = \eta \;{\kern 1pt} P({z_t}|{x_t},{u_1},{z_1}, \ldots ,{u_t})\;P({x_t}|{u_1},{z_1},\; \ldots ,{u_t}) ~~~~~~\rm{<—Bayes}$
$ = \eta \;{\kern 1pt} P({z_t}|{x_t})\;P({x_t}|{u_1},{z_1},\; \ldots ,{u_t})~~~~~~\rm{<—Markov}$
$ \!=\! \eta P({z_t}|{x_t})\int {P({x_t}|{u_1},{z_1},\! \ldots ,{u_t},{x_{t - 1}})} P({x_{t - 1}}|{u_1},{z_1}, \ldots ,{u_t})d{x_{t - 1}})~\rm{<—Total Prob}.$
$ = \eta P({z_t}|{x_t})\int {P({x_t}|{u_t},{x_{t - 1}})} P({x_{t - 1}}|{u_1},{z_1}, \ldots ,{u_t})d{x_{t - 1}})\; \rm{<—Markov}$
$ = \eta P({z_t}|{x_t})\int {P({x_t}|{u_t},{x_{t - 1}}){\mkern 1mu} } P({x_{t - 1}}|{u_1},{z_1}, \ldots ,{z_{t - 1}})d{x_{t - 1}})\; \rm{<—Markov}$
$ = \eta P({z_t}|{x_t})\int {P({x_t}|{u_t},{x_{t - 1}})} Bel({x_{t - 1}})\;d{x_{t - 1}}$
其中第一步采用贝叶斯公式展开,第二步使用Markov性质($z_t$仅由$x_t$决定);第三步使用全概率公式对$x_{t-1}$进行展开;第四步继续使用Markov性质($x_t$仅由$x_{t-1}$和$u_t$决定);第五步继续使用Markov性质,因为$x_{t-1}$同$u_t$无关,最终得到$Bel(x_t)$的递推公式。
可见递推公式中分为两个步骤,$\int {P({x_t}|{u_t},{x_{t - 1}})} Bel({x_{t - 1}})\;d{x_{t - 1}}$部分是基于$x_{t-1}, u_t$预测$x_t$的状态;$\eta P({z_t}|{x_t})$部分是基于观测$z_t$更新状态$x_t$.
4.3 Bayes滤波算法流程
所以,Bayes滤波的算法流程图如图5所示。如果$d$是观测,则进行一次状态更新,如果$d$是动作,则进行一次状态预测。
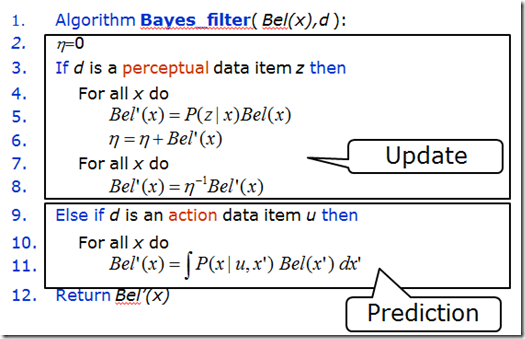
图5. Bayes滤波的算法流程
我们看到,在进行状态预测时,需要对所有可能的$x’$状态进行遍历,使得基本的Bayes模型在计算上成本是较高的。
4.3 Bayes滤波算法的应用
Bayes滤波方法是很多实用算法的基础,例如:
- Kalman滤波
- 扩展Kalman滤波
- 信息滤波
- 粒子滤波
等,我们在下一节介绍Kalman滤波。
参考文献
[1]. Sebastian Thrun, Wolfram Burgard, Dieter Fox, Probabilistic Robotics, 2002, The MIT Press.
(一):细说贝叶斯滤波:Bayes filters的更多相关文章
- 托马斯·贝叶斯 (Thomas Bayes)
朴素贝叶斯 Day15,开始学习朴素贝叶斯,先了解一下贝爷,以示敬意. 托马斯·贝叶斯 (Thomas Bayes),英国神学家.数学家.数理统计学家和哲学家,1702年出生于英国伦敦,做过神甫: ...
- 朴素贝叶斯 Naive Bayes
2017-12-15 19:08:50 朴素贝叶斯分类器是一种典型的监督学习的算法,其英文是Naive Bayes.所谓Naive,就是天真的意思,当然这里翻译为朴素显得更学术化. 其核心思想就是利用 ...
- (main)贝叶斯统计 | 贝叶斯定理 | 贝叶斯推断 | 贝叶斯线性回归 | Bayes' Theorem
2019年08月31日更新 看了一篇发在NM上的文章才又明白了贝叶斯方法的重要性和普适性,结合目前最火的DL,会有意想不到的结果. 目前一些最直觉性的理解: 概率的核心就是可能性空间一定,三体世界不会 ...
- 机器学习算法实践:朴素贝叶斯 (Naive Bayes)(转载)
前言 上一篇<机器学习算法实践:决策树 (Decision Tree)>总结了决策树的实现,本文中我将一步步实现一个朴素贝叶斯分类器,并采用SMS垃圾短信语料库中的数据进行模型训练,对垃圾 ...
- 从贝叶斯到粒子滤波——Round 2
上一篇博文已经讲了贝叶斯滤波的原理以及公式的推导:http://www.cnblogs.com/JunhaoWu/p/bayes_filter.html 本篇文章将从贝叶斯滤波引入到粒子滤波,讲诉粒子 ...
- 从贝叶斯到粒子滤波——Round 1
粒子滤波确实是一个挺复杂的东西,从接触粒子滤波到现在半个多月,博主哦勒哇看了N多篇文章,查略了嗨多资料,很多内容都是看了又看,细细斟酌.今日,便在这里验证一下自己的修炼成果,请各位英雄好汉多多指教. ...
- 【机器学习速成宝典】模型篇05朴素贝叶斯【Naive Bayes】(Python版)
目录 先验概率与后验概率 条件概率公式.全概率公式.贝叶斯公式 什么是朴素贝叶斯(Naive Bayes) 拉普拉斯平滑(Laplace Smoothing) 应用:遇到连续变量怎么办?(多项式分布, ...
- 神经网络中的BP神经网络和贝叶斯
1 贝叶斯网络在地学中的应用 1 1.1基本原理及发展过程 1 1.2 具体的研究与应用 4 2 BP神经网络在地学中的应用 6 2.1BP神经网络简介 6 2.2基本原理 7 2.3 在地学中的具体 ...
- NLP系列(2)_用朴素贝叶斯进行文本分类(上)
作者:龙心尘 && 寒小阳 时间:2016年1月. 出处: http://blog.csdn.net/longxinchen_ml/article/details/50597149 h ...
随机推荐
- Maven解决依赖冲突
依赖冲突 若项目中多个Jar同时引用了相同的Jar时,会产生依赖冲突,但Maven采用了两种避免冲突的策略,因此在Maven中是不存在依赖冲突的. 短路优先 本项目-->A.jar-->B ...
- sychronized
说一下 synchronized 底层实现原理? synchronized可以保证方法或者代码块在运行时, 同一时刻只有一个方法可以进入到临界区, 同时它还可以保证共享变量的内存可见性. Java中每 ...
- Linux的基础——虚拟机的克隆
1.虚拟机的安装 虚拟机的安装在另一个文档 安装jdk(在另外一个文档中) 2.虚拟机的克隆 准备工作:一台装有Linux系统的主机(已经配置好jdk) 选择主机进行克隆 注意:这里一定要选择创建完整 ...
- 微信小程序切换选中状态
实现的主要思路是根据每一项的index值,动态改变idx值,当index==idx值的时候,添加点击选中样式的类名. wxml: <scroll-view scroll-x="tru ...
- Google Chrome浏览器必备的20个插件
Google Chrome浏览器虽然与火狐浏览器有所区别,不过他们都是很开放的浏览器产品,所以也有许多有用的插件,这些插件对于日常生活与网络冲浪都很有用,比如网银,炒股等. Google Chrome ...
- mysql8.0----mysqldump抛出:Unknown table 'COLUMN_STATISTICS' in information_schema (1109)
问题:我尝试使用mysqldump时,得到以下错误: 复制 $> mysqldump --single-transaction --h -u user -p db > db.sql my ...
- C#多线程开发-线程同步 02
上一篇文章主要带领大家认识了线程,也了解到了线程的基本用法和状态,接下来就让我们一起学习下什么是线程同步. 线程中异常的处理 在线程中始终使用try/catch代码块是非常重要的,因为不可能在线程代码 ...
- 堆栈相关的经典题(c++)
1.定义队列 typedef struct node{ int data; struct node * next; }Node; typedef struct linkQueue { Node * f ...
- Java中Scanner用法总结
最近在做OJ类问题的时候,经常由于Scanner的使用造成一些细节问题导致程序不通过(最惨的就是网易笔试,由于sc死循环了也没发现,导致AC代码也不能通过...),因此对Scanner进行了一些总结整 ...
- Python之requests模块-request api
requests所有功能都能通过"requests/api.py"中的方法访问.它们分别是: requests.request(method, url, **kwargs) req ...