【九】强化学习之TD3算法四轴飞行器仿真---PaddlePaddlle【PARL】框架
相关文章:
【一】飞桨paddle【GPU、CPU】安装以及环境配置+python入门教学
代码链接:码云:https://gitee.com/dingding962285595/parl_work ;github:https://github.com/PaddlePaddle/PARL
本节码源链接:https://github.com/PaddlePaddle/RLSchool
1.RLSchool:强化学习模拟环境集合
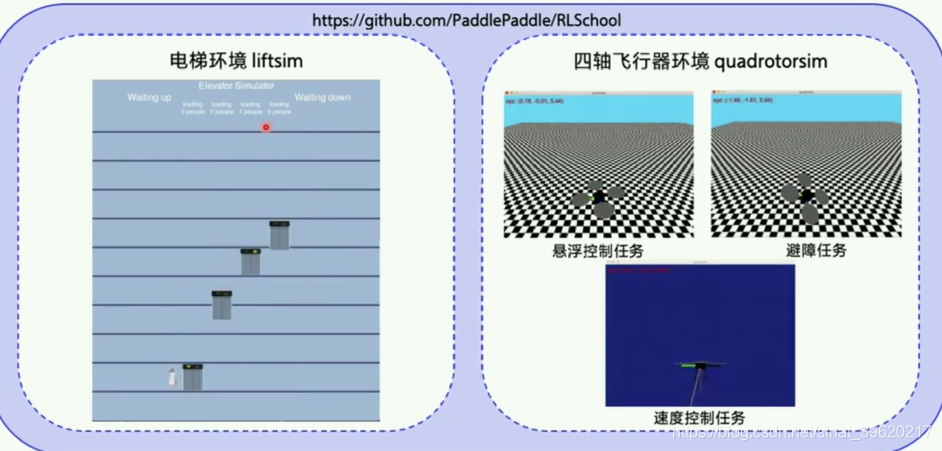
悬浮控制任务:
●保持四轴飞行器悬停不掉落
●环境:
●水平地板100 x 100
●飞行器自身
●初始状态:
●起始坐标(0, 0, 5)
●随机角度和随机速度
●停止条件:
●撞到地板
●超过1000个step
●Reward:
●悬停越久越好
●能量损耗越小越好
●离初始位置越近越好
2.安装
```
pip install rlschool
```
## 测试环境可视化功能
```sh
# 避障任务, 'no_collision'
python -m rlschool.quadrotor.env
# 速度控制任务, 'velocity_control'
python -m rlschool.quadrotor.env velocity_control
# 悬浮控制任务, 'hovering_control'
python -m rlschool.quadrotor.env hovering_control
```
环境正确安装后,飞行器飞行渲染效果如下:
* 避障任务
<img src="demo/demo_no_collision.gif" width="400"/>
* 速度控制任务
<img src="demo/demo_velocity_control.gif" width="400"/>
* 悬浮控制任务
<img src="demo/demo_hovering_control.gif" width="400"/>3.环境创建及使用
四轴飞行器环境遵循标准的[Gym][gym] APIs接口来创建、运行和渲染环境。目前,四轴飞行器支持3种任务:避障任务、速度控制任务、悬浮控制任务。任务由创建环境时的`task`参数设定。
创建避障任务的示例代码如下:
```python
from rlschool import make_env
env = make_env("Quadrotor", task="no_collision", map_file=None, simulator_conf=None)
env.reset()
```当参数`map_file`为默认值`None`时,模拟器世界是将使用100x100的平底作为地图。一旦飞行器落下,即认为击中障碍物,环境终止。地图文件是如[default_map.txt][map_example]格式的文本文件,其中每个数字表示对应位置障碍墙的高度。`-1`标记了飞行器的初识位置。需要时,可以设定`map_file`为用户自己生成的地图配置文件。
当参数`simulator_conf`是默认值`None`时,将会使用默认的模拟器配置[config.json][default_sim_conf]。如果用户需要自主设定四轴飞行器的动力学参数,可以将`simulator_conf`设定为新的_config.json_的路径。
创建速度控制任务的示例代码如下:
```python
from rlschool import make_env
env = make_env("Quadrotor", task="velocity_control", seed=0)
env.reset()
```其中,`seed`参数是用来采样目标速度序列的随机种子,不同随机种子将生成不同的速度控制任务。
创建悬浮控制任务的示例代码如下:
```python
from rlschool import make_env
env = make_env("Quadrotor", task="hovering_control")
env.reset()
```3.1 动作空间
四轴飞行器的动作代表施加在4个螺旋桨发动机的4个电压值,安装默认配置文件[config.json](default_sim_conf),电压的范围在`[0.10, 15.0]`。
用户可以通过一些特殊的动作理解控制电压如何操作四轴飞行器,例如,动作`[1.0, 1.0, 1.0, 1.0]`将使无初速度的飞行器垂直向上或向下运动。
```python
from rlschool import make_env
env = make_env("Quadrotor", task="no_collision")
env.reset()
env.render()
reset = False
while not reset:
state, reward, reset, info = env.step([1.0, 1.0, 1.0, 1.0])
env.render()
```3.2 状态
四轴飞行器的状态可以分为3类:传感器测量数据,飞行状态和任务相关状态。可以通过`env.step`返回的第四个量`info`获得Python字典形式的状态值。
3.2.1 传感器测量数据
* `acc_x`: 加速度计在x轴方向上的测量值。
* `acc_y`: 加速度计在y轴方向上的测量值。
* `acc_z`: 加速度计在z轴方向上的测量值。
* `gyro_x`: 陀螺仪在x轴方向上的测量值。
* `gyro_y`: 陀螺仪在y轴方向上的测量值。
* `gyro_z`: 陀螺仪在z轴方向上的测量值。
* `z`: 气压计测量的高度数据,为方便认为是到地面的距离。
* `pitch`: 飞行器绕y轴的逆时针转动角度。
* `roll`: 飞行器绕x轴的逆时针转动角度。
* `yaw`: 飞行器绕z轴的逆时针转动角度。
这里需要说明的是,`pitch`, `roll`, `yaw`是陀螺仪测量的角速度随时间的积累值,因此算作传感器测量。
3.2.2 飞行器状态
* `b_v_x`: 在飞行器坐标系下的x轴方向速度。
* `b_v_y`: 在飞行器坐标系下的y轴方向速度。
* `b_v_z`: 在飞行器坐标系下的z轴方向速度。
3.2.3 任务相关状态
对速度控制任务,有如下额外状态:
* `next_target_g_v_x`: 任务设定的下一时刻目标速度在x轴的分量。
* `next_target_g_v_y`: 任务设定的下一时刻目标速度在y轴的分量。
* `next_target_g_v_z`: 任务设定的下一时刻目标速度在z轴的分量。
4.算法的收敛问题分析
4.1. 常规方法:
首先对于四轴飞行器的控制我们应利用 4 个维度的动作输出,以控制 4 个电机
但是这样的方法收敛速度非常慢
原因:这种情况下 4 个输出不但要学习环境的反馈变化,还要学习 4 者之间的搭配,所以导致学习时间非常长,达到收敛通常需要 100w steps 左右。
4.2. PARL思路探讨:
在本文中,让 DDPG 算法直接进行 5 个维度的输出,其中一个维度作为主控,同时控制 4 个电机的主电压,另外 4 个维度作为微调,对 4 个电机的电压做修正,其中设定输出电压为:主控电压+0.1*修正电压
最后效果非常好,5w-6w steps 左右就可以达到很好的收敛。
4.2.1 主程序train.py
import os
import numpy as np
import parl
from parl import layers
from paddle import fluid
from parl.utils import logger
from parl.utils import ReplayMemory # 经验回放
#from parl.utils import action_mapping
from parl.env.continuous_wrappers import ActionMappingWrapper # 将神经网络输出映射到对应的实际动作取值范围内
from rlschool import make_env # 使用 RLSchool 创建飞行器环境
from quadrotor_model import QuadrotorModel
from quadrotor_agent import QuadrotorAgent
from parl.algorithms import DDPG
GAMMA = 0.99 # reward 的衰减因子,一般取 0.9 到 0.999 不等
TAU = 0.001 # target_model 跟 model 同步参数 的 软更新参数
ACTOR_LR = 0.0002 # Actor网络更新的 learning rate
CRITIC_LR = 0.001 # Critic网络更新的 learning rate
MEMORY_SIZE = 1e6 # replay memory的大小,越大越占用内存
MEMORY_WARMUP_SIZE = 1e4 # replay_memory 里需要预存一些经验数据,再从里面sample一个batch的经验让agent去learn
REWARD_SCALE = 0.01 # reward 的缩放因子
BATCH_SIZE = 256 # 每次给agent learn的数据数量,从replay memory随机里sample一批数据出来
TRAIN_TOTAL_STEPS = 1e6 # 总训练步数
TEST_EVERY_STEPS = 1e4 # 每个N步评估一下算法效果,每次评估5个episode求平均reward
def run_episode(env, agent, rpm):
obs = env.reset()
total_reward, steps = 0, 0
while True:
steps += 1
batch_obs = np.expand_dims(obs, axis=0)
action = agent.predict(batch_obs.astype('float32'))
action = np.squeeze(action)
# Add exploration noise, and clip to [-1.0, 1.0]
action = np.clip(np.random.normal(action, 1.0), -1.0, 1.0)
next_obs, reward, done, info = env.step(action)
rpm.append(obs, action, REWARD_SCALE * reward, next_obs, done)
if rpm.size() > MEMORY_WARMUP_SIZE:
batch_obs, batch_action, batch_reward, batch_next_obs, \
batch_terminal = rpm.sample_batch(BATCH_SIZE)
critic_cost = agent.learn(batch_obs, batch_action, batch_reward,
batch_next_obs, batch_terminal)
obs = next_obs
total_reward += reward
if done:
break
return total_reward, steps
# 评估 agent, 跑 5 个episode,总reward求平均
def evaluate(env, agent, render=False):
eval_reward = []
for i in range(5):
obs = env.reset()
total_reward, steps = 0, 0
while True:
batch_obs = np.expand_dims(obs, axis=0)
action = agent.predict(batch_obs.astype('float32'))
action = np.squeeze(action)
action = np.clip(action, -1.0, 1.0) ## special
next_obs, reward, done, info = env.step(action)
obs = next_obs
total_reward += reward
steps += 1
if render:
env.render()
if done:
break
eval_reward.append(total_reward)
return np.mean(eval_reward)
# 创建飞行器环境
env = make_env("Quadrotor", task="hovering_control")
# 将神经网络输出(取值范围为[-1, 1])映射到对应的实际动作取值范围内
#env = ActionMappingWrapper(env) #TODO:!!!!这一步会报错
env.reset()
obs_dim = env.observation_space.shape[0]
act_dim = env.action_space.shape[0]
# 使用parl框架搭建Agent:QuadrotorModel, DDPG, QuadrotorAgent三者嵌套
model = QuadrotorModel(act_dim)
algorithm = DDPG(
model, gamma=GAMMA, tau=TAU, actor_lr=ACTOR_LR, critic_lr=CRITIC_LR)
agent = QuadrotorAgent(algorithm, obs_dim, act_dim)
# parl库也为DDPG算法内置了ReplayMemory,可直接从 parl.utils 引入使用
rpm = ReplayMemory(int(MEMORY_SIZE), obs_dim, act_dim)
test_flag = 0
total_steps = 0
'''
testing = 1 #添加的
if(not testing): '''
while total_steps < TRAIN_TOTAL_STEPS:
train_reward, steps = run_episode(env, agent, rpm)
total_steps += steps
#logger.info('Steps: {} Reward: {}'.format(total_steps, train_reward))
if total_steps // TEST_EVERY_STEPS >= test_flag:
while total_steps // TEST_EVERY_STEPS >= test_flag:
test_flag += 1
evaluate_reward = evaluate(env, agent)
logger.info('Steps {}, Test reward: {}'.format(total_steps,
evaluate_reward))
# 保存模型
ckpt = 'model_dir/steps_{}.ckpt'.format(total_steps)
agent.save(ckpt)
'''###添加的 TODO:参考添加的加载模型
else:
# 加载模型
save_path = 'model_dir/steps_10095.ckpt'
agent.restore(save_path)
evaluate_reward = evaluate(env, agent, render=False)
logger.info('Test reward: {}'.format(evaluate_reward))
'''
4.2.2 加载模型,训练,测试------(包含测试)
该模块参考:https://blog.csdn.net/qq_42067550/article/details/106984355
# 加载模型
# save_path = 'model_dir_3/steps_1000000.ckpt'
# agent.restore(save_path)
# parl库也为DDPG算法内置了ReplayMemory,可直接从 parl.utils 引入使用
rpm = ReplayMemory(int(MEMORY_SIZE), obs_dim, act_dim)
test_flag = 0
total_steps = 0
testing = 1
if (not testing):
while total_steps < TRAIN_TOTAL_STEPS:
train_reward, steps = run_episode(env, agent, rpm)
total_steps += steps
# logger.info('Steps: {} Reward: {}'.format(total_steps, train_reward))
if total_steps // TEST_EVERY_STEPS >= test_flag:
while total_steps // TEST_EVERY_STEPS >= test_flag:
test_flag += 1
evaluate_reward = evaluate(env, agent)
logger.info('Steps {}, Test reward: {}'.format(total_steps,
evaluate_reward))
# 保存模型
ckpt = 'model_dir_1/steps_{}.ckpt'.format(total_steps)
agent.save(ckpt)
else:
# 加载模型
save_path = 'steps_50000.ckpt'
agent.restore(save_path)
evaluate_reward = evaluate(env, agent, render=False)
logger.info('Test reward: {}'.format(evaluate_reward))
4.2.3神经网络model
import paddle.fluid as fluid
import parl
from parl import layers
class ActorModel(parl.Model):
def __init__(self, act_dim):
hidden_dim_1, hidden_dim_2 = 64, 64
self.fc1 = layers.fc(size=hidden_dim_1, act='tanh')
self.fc2 = layers.fc(size=hidden_dim_2, act='tanh')
self.fc3 = layers.fc(size=act_dim, act='tanh')
def policy(self, obs):
x = self.fc1(obs)
x = self.fc2(x)
return self.fc3(x)
class CriticModel(parl.Model):
def __init__(self):
hidden_dim_1, hidden_dim_2 = 64, 64
self.fc1 = layers.fc(size=hidden_dim_1, act='tanh')
self.fc2 = layers.fc(size=hidden_dim_2, act='tanh')
self.fc3 = layers.fc(size=1, act=None)
def value(self, obs, act):
x = self.fc1(obs)
concat = layers.concat([x, act], axis=1)
x = self.fc2(concat)
Q = self.fc3(x)
Q = layers.squeeze(Q, axes=[1])
return Q
class QuadrotorModel(parl.Model):
def __init__(self, act_dim):
self.actor_model = ActorModel(act_dim)
self.critic_model = CriticModel()
def policy(self, obs):
return self.actor_model.policy(obs)
def value(self, obs, act):
return self.critic_model.value(obs, act)
def get_actor_params(self):
return self.actor_model.parameters()4.2.4 agent模块
import numpy as np
import parl
from parl import layers
from paddle import fluid
class QuadrotorAgent(parl.Agent):
def __init__(self, algorithm, obs_dim, act_dim=4):
assert isinstance(obs_dim, int)
assert isinstance(act_dim, int)
self.obs_dim = obs_dim
self.act_dim = act_dim
super(QuadrotorAgent, self).__init__(algorithm)
# Attention: In the beginning, sync target model totally.
self.alg.sync_target(decay=0)
def build_program(self):
self.pred_program = fluid.Program()
self.learn_program = fluid.Program()
with fluid.program_guard(self.pred_program):
obs = layers.data(
name='obs', shape=[self.obs_dim], dtype='float32')
self.pred_act = self.alg.predict(obs)
with fluid.program_guard(self.learn_program):
obs = layers.data(
name='obs', shape=[self.obs_dim], dtype='float32')
act = layers.data(
name='act', shape=[self.act_dim], dtype='float32')
reward = layers.data(name='reward', shape=[], dtype='float32')
next_obs = layers.data(
name='next_obs', shape=[self.obs_dim], dtype='float32')
terminal = layers.data(name='terminal', shape=[], dtype='bool')
_, self.critic_cost = self.alg.learn(obs, act, reward, next_obs,
terminal)
def predict(self, obs):
obs = np.expand_dims(obs, axis=0)
act = self.fluid_executor.run(
self.pred_program, feed={'obs': obs},
fetch_list=[self.pred_act])[0]
return act
def learn(self, obs, act, reward, next_obs, terminal):
feed = {
'obs': obs,
'act': act,
'reward': reward,
'next_obs': next_obs,
'terminal': terminal
}
critic_cost = self.fluid_executor.run(
self.learn_program, feed=feed, fetch_list=[self.critic_cost])[0]
self.alg.sync_target()
return critic_cost
5. 仿真结果:
代码详细解析和结果见-链接:https://aistudio.baidu.com/aistudio/projectdetail/1705633

【九】强化学习之TD3算法四轴飞行器仿真---PaddlePaddlle【PARL】框架的更多相关文章
- 【算法总结】强化学习部分基础算法总结(Q-learning DQN PG AC DDPG TD3)
总结回顾一下近期学习的RL算法,并给部分实现算法整理了流程图.贴了代码. 1. value-based 基于价值的算法 基于价值算法是通过对agent所属的environment的状态或者状态动作对进 ...
- 强化学习(十七) 基于模型的强化学习与Dyna算法框架
在前面我们讨论了基于价值的强化学习(Value Based RL)和基于策略的强化学习模型(Policy Based RL),本篇我们讨论最后一种强化学习流派,基于模型的强化学习(Model Base ...
- 强化学习-时序差分算法(TD)和SARAS法
1. 前言 我们前面介绍了第一个Model Free的模型蒙特卡洛算法.蒙特卡罗法在估计价值时使用了完整序列的长期回报.而且蒙特卡洛法有较大的方差,模型不是很稳定.本节我们介绍时序差分法,时序差分法不 ...
- 【强化学习】DQN 算法改进
DQN 算法改进 (一)Dueling DQN Dueling DQN 是一种基于 DQN 的改进算法.主要突破点:利用模型结构将值函数表示成更加细致的形式,这使得模型能够拥有更好的表现.下面给出公式 ...
- 强化学习(十八) 基于模拟的搜索与蒙特卡罗树搜索(MCTS)
在强化学习(十七) 基于模型的强化学习与Dyna算法框架中,我们讨论基于模型的强化学习方法的基本思路,以及集合基于模型与不基于模型的强化学习框架Dyna.本文我们讨论另一种非常流行的集合基于模型与不基 ...
- [Reinforcement Learning] 强化学习介绍
随着AlphaGo和AlphaZero的出现,强化学习相关算法在这几年引起了学术界和工业界的重视.最近也翻了很多强化学习的资料,有时间了还是得自己动脑筋整理一下. 强化学习定义 先借用维基百科上对强化 ...
- 强化学习(八):Eligibility Trace
Eligibility Traces Eligibility Traces是强化学习中很基本很重要的一个概念.几乎所有的TD算法可以结合eligibility traces获得更一般化的算法,并且通常 ...
- 基于Keras的OpenAI-gym强化学习的车杆/FlappyBird游戏
强化学习 课程:Q-Learning强化学习(李宏毅).深度强化学习 强化学习是一种允许你创造能从环境中交互学习的AI Agent的机器学习算法,其通过试错来学习.如上图所示,大脑代表AI Agent ...
- 李宏毅强化学习完整笔记!开源项目《LeeDeepRL-Notes》发布
Datawhale开源 核心贡献者:王琦.杨逸远.江季 提起李宏毅老师,熟悉强化学习的读者朋友一定不会陌生.很多人选择的强化学习入门学习材料都是李宏毅老师的台大公开课视频. 现在,强化学习爱好者有更完 ...
- 强化学习调参技巧二:DDPG、TD3、SAC算法为例:
1.训练环境如何正确编写 强化学习里的 env.reset() env.step() 就是训练环境.其编写流程如下: 1.1 初始阶段: 先写一个简化版的训练环境.把任务难度降到最低,确保一定能正常训 ...
随机推荐
- Java 模拟数据库连接池的实现
前面学习过等待 - 通知机制,现在我们在其基础上添加一个超时机制,模拟从连接池中获取.使用和释放连接的过程.客户端获取连接的过程被设定为等待超时模式,即如果在 1000 毫秒内无法获取到可用连接,将会 ...
- Leaflet 地图偏移 地图纠偏
(地图瓦片纠偏最好的方法在这:https://www.cnblogs.com/s0611163/p/15606460.html) 地图区域是一个市,偏移量可以近似认为是固定不变的,通过修改Leafle ...
- Codeforces Round #739 (Div. 3) 个人题解(A~F2)
比赛链接:Here 1560A. Dislike of Threes Description 找出第 $k$ 大的不可被 $3$ 整除以及非 $3$ 结尾的整数 直接枚举出前 1000 个符合条件的数 ...
- mybatis-plus数据批量插入
为了提高数据处理效率,大量数据需要插入数据时可以采用批量数据插入的策略提高数据插入的效率. 如下是实现方法 1.代码结构 2.实体类 package little.tiger.one.applicat ...
- 存储密码-ssh添加秘钥
- mixin混合
多个组件有相同的逻辑,抽离出来 mixin并不是完美的解决方案,会有一些问题 vue3提出composition api旨在解决这些问题
- 使用 Sealos 将 ChatGLM3 接入 FastGPT,打造完全私有化 AI 客服
FastGPT 是一款专为客服问答场景而定制的开箱即用的 AI 知识库问答系统.该系统具备可视化工作流功能,允许用户灵活地设计复杂的问答流程,几乎能满足各种客服需求. 在国内市场环境下,离线部署对于企 ...
- 开源项目《Elight.MVC-ASP.NET》的研究学习
一 观看效果 将源码下载来后,发现不能直接运行,读了一下md文件,发现还要做自己一些改动. 由于我本机是sqlserver, 所以我改了下 appsetting.json 里要使用的数据库,然后 ...
- java基础-流程控制-day04
目录 1. if单分支 2. if else 多分支 3. if else双分支 4. 随机生成一定区间的整数 5 switch语句 6. while循环 7. for循环 8. break cont ...
- java基础-运算符--day03
目录 1. 算数运算符 2.+号 3. ++ 4. = 赋值操作 5. 关系运算 6. 逻辑运算 7. 三元运算 8 位运算 1. 算数运算符 / 处以 % 取余 public class TestO ...