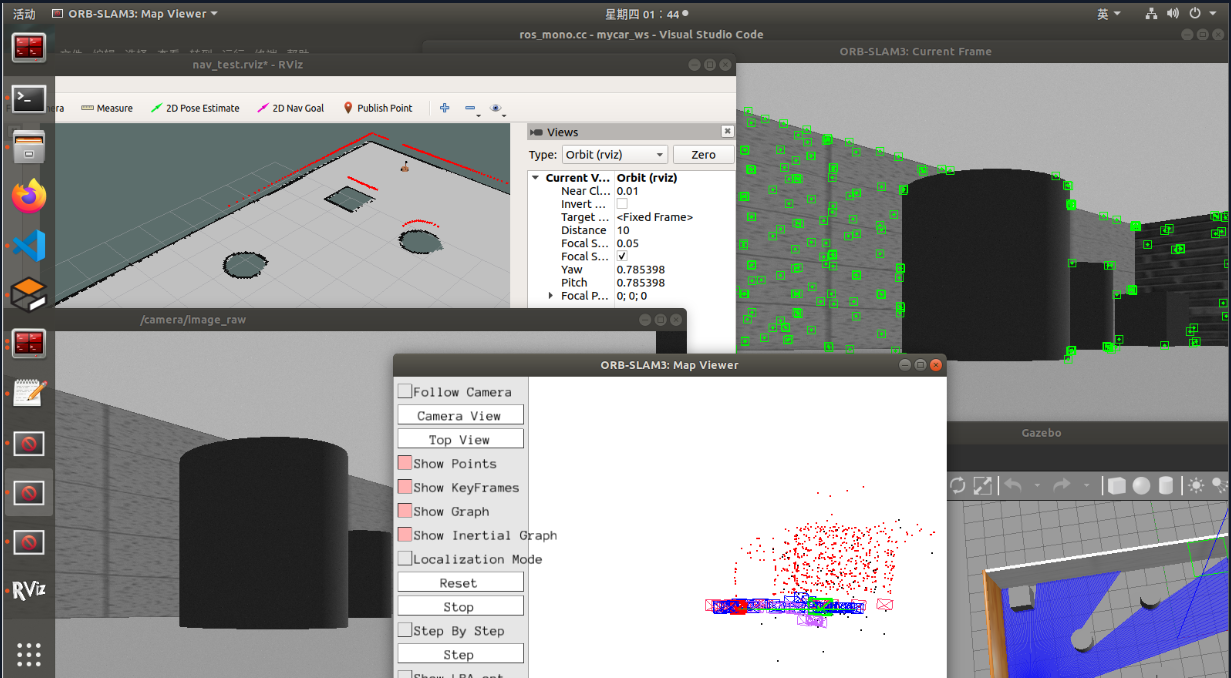
Gazebo、Rviz 结合 ORB-SLAM3 实现运动规划及定位
基于以下内容,详见博客链接
参考链接
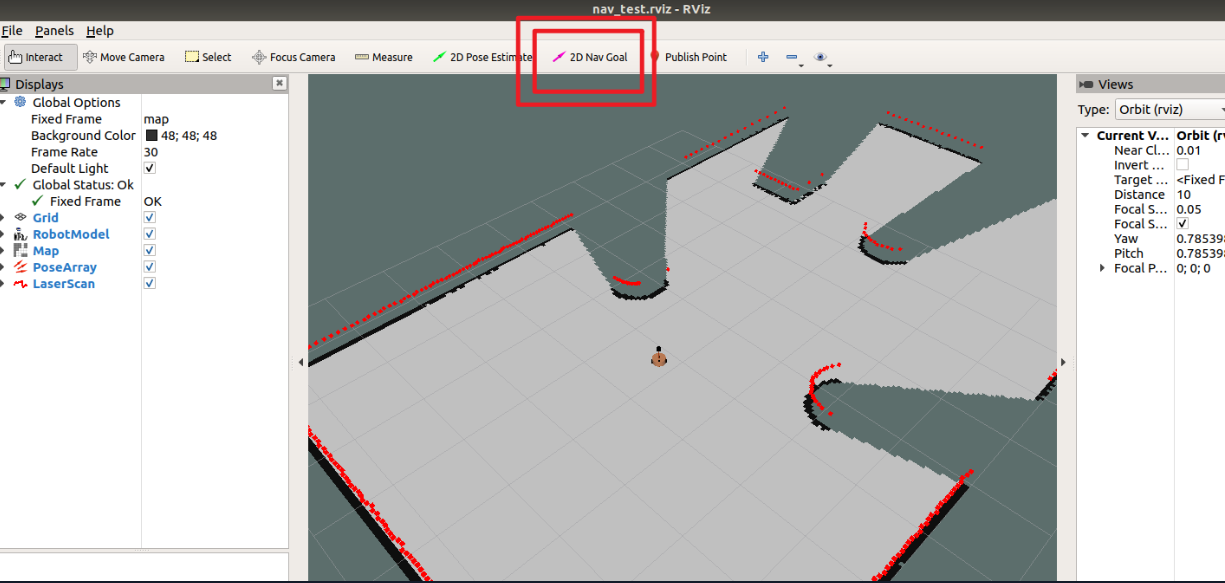
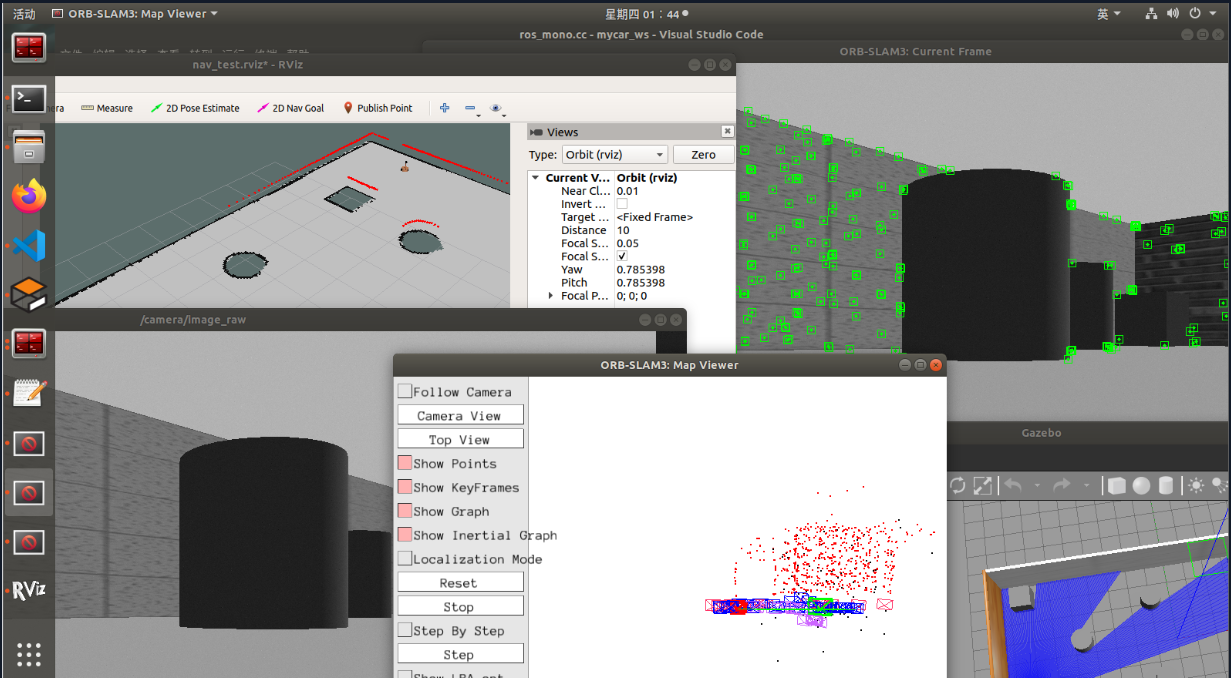
成果图
STEP1: 安装摄像头驱动
(1)笔记本摄像头
sudo apt-get install ros-melodic-uvc-camera
(2)USB摄像头
sudo apt-get install ros-melodic-usb-cam
STEP2: 安装image相关功能包
sudo apt-get install ros-melodic-image-*
sudo apt-get install ros-melodic-rqt-image-view
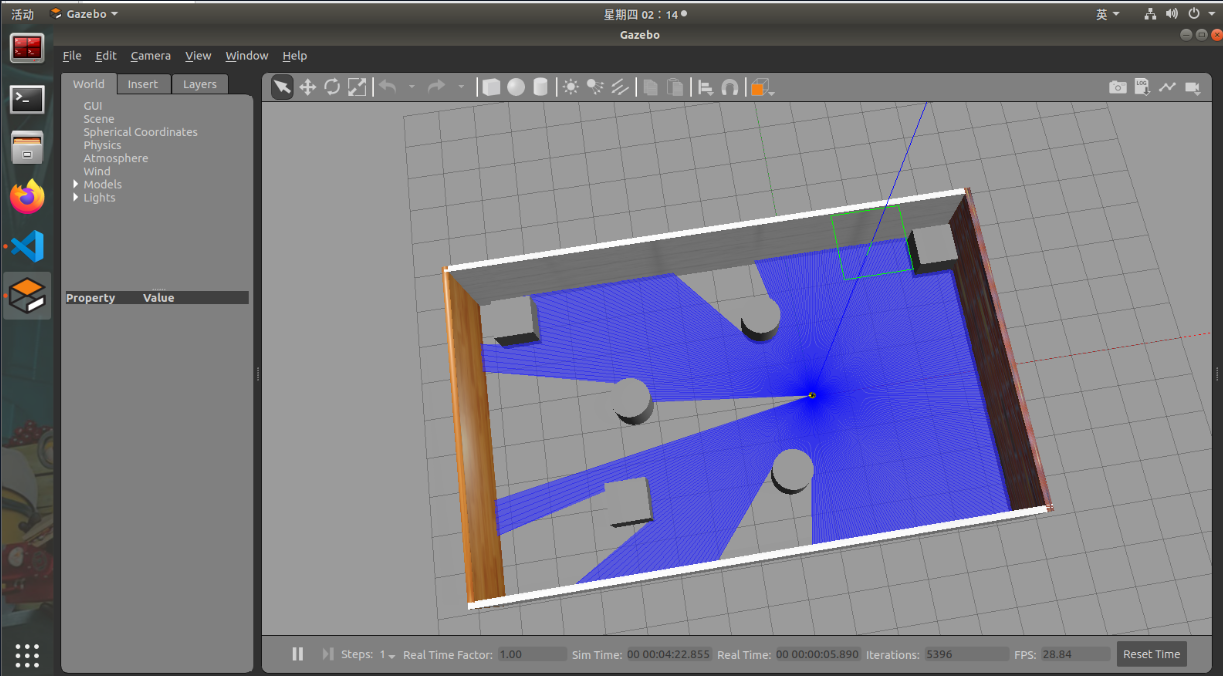
STEP3: 启动 gazebo 仿真环境
source ./devel/setup.bash
roslaunch mycar environment.launch

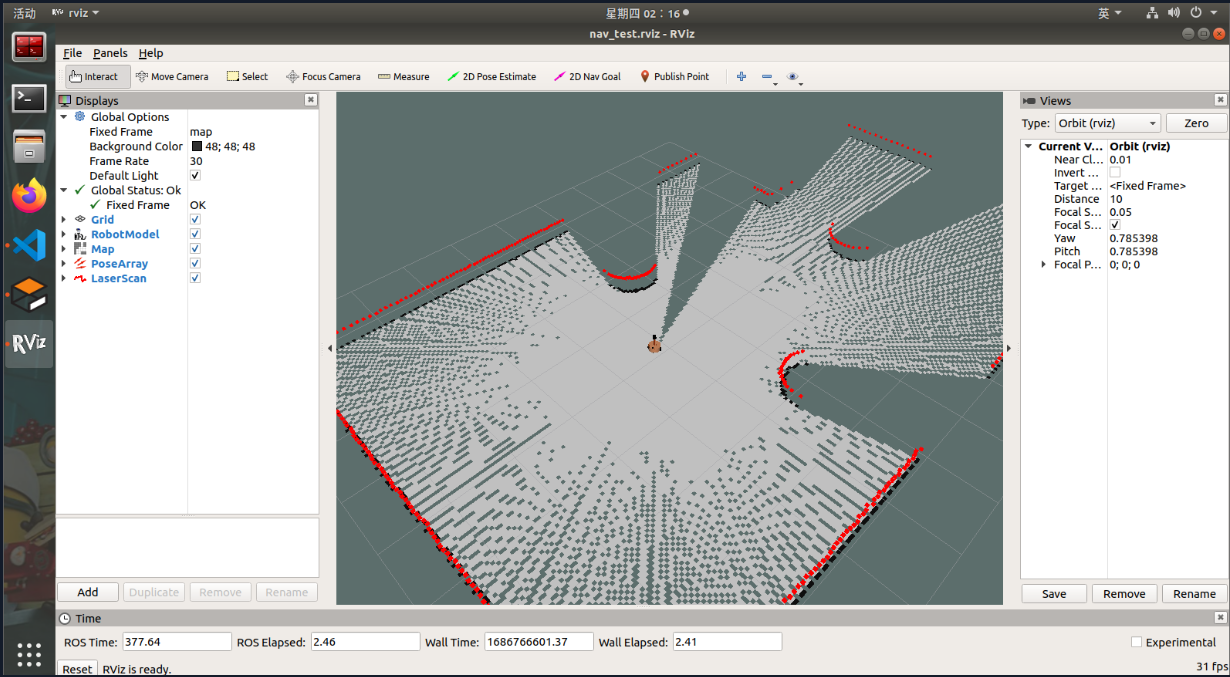
STEP4: 启动 rviz 相关节点
source ./devel/setup.bash
roslaunch nav_demo nav07_slam_auto.launch

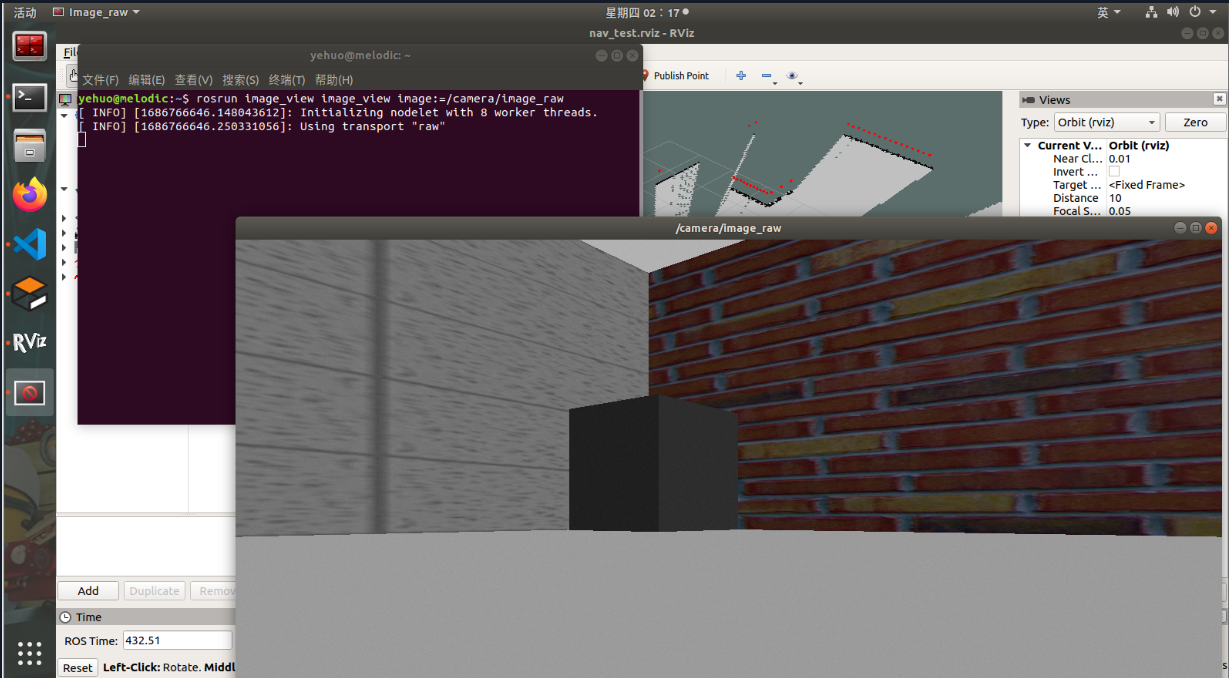
STEP5: 启动相机节点
rosrun image_view image_view image:=/camera/image_raw
STEP6: 启动 ORB-SLAM3
rosrun ORB_SLAM3 Mono /home/yehuo/SLAM/ORB_SLAM3-master/Vocabulary/ORBvoc.txt /home/yehuo/SLAM/ORB_SLAM3-master/Examples/ROS/ORB_SLAM3/Asus.yaml
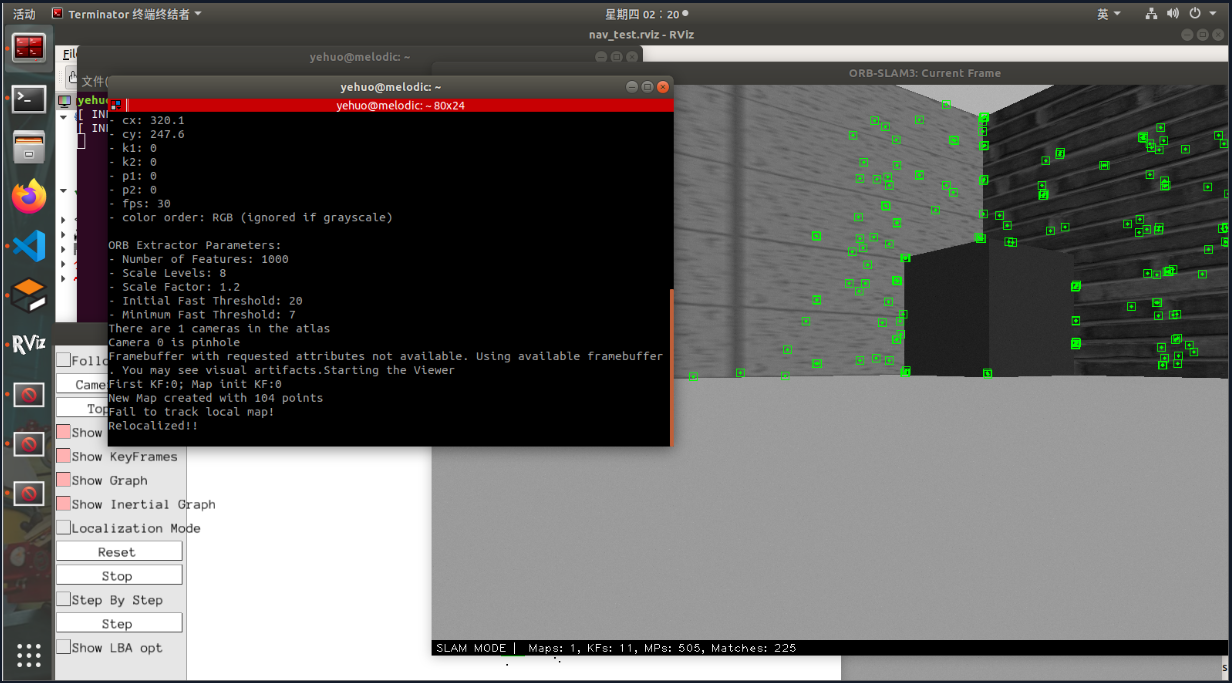
STEP7: 测试
测试小车运动规划以及定位功能
Gazebo、Rviz 结合 ORB-SLAM3 实现运动规划及定位的更多相关文章
- 运动规划 (Motion Planning): MoveIt! 与 OMPL
原创博文:转载请标明出处:http://www.cnblogs.com/zxouxuewei 最近有不少人询问有关MoveIt!与OMPL相关的话题,但是大部分问题都集中于XXX功能怎么实现,XXX错 ...
- 运动规划 (Motion Planning): MoveIt! 与 OMPL---44
原创博文:转载请标明出处:http://www.cnblogs.com/zxouxuewei 最近有不少人询问有关MoveIt!与OMPL相关的话题,但是大部分问题都集中于XXX功能怎么实现,XXX错 ...
- 如何用MoveIt快速搭建机器人运动规划平台?
MoveIt = RobotGo,翻译成中文就是“机器人,走你!”所以,MoveIt的主要就是一款致力于让机器人能够自主运动及其相关技术的软件,它的所有模块都是围绕着运动规划的实现而设计的. 两个月前 ...
- Learning ROS for Robotics Programming Second Edition学习笔记(十) indigo Gazebo rviz slam navigation
中文译著已经出版,详情请参考:http://blog.csdn.net/ZhangRelay/article/category/6506865 moveit是书的最后一章,由于对机械臂完全不知,看不懂 ...
- 【2018.04.19 ROS机器人操作系统】机器人控制:运动规划、路径规划及轨迹规划简介之一
参考资料及致谢 本文的绝大部分内容转载自以下几篇文章,首先向原作者致谢,希望自己能在这些前辈们的基础上能有所总结提升. 1. 运动规划/路径规划/轨迹规划的联系与区别 https://blog.csd ...
- 机器人运动规划中的构形空间(Configuration Space)
A key concept in motion planning is configuration space, or C-space for short. Every point in the C- ...
- MoveIt运动规划-1
按照帮助文档Setup Assistant Tutorial中的描述,用moveit_setup_assistant图形界面一步步配置机器人,最后生成机器人的配置文件保存到指定的文件夹中. 以UR5机 ...
- Grassfire算法- 运动规划(Motion planning)
Grassfire算法: 一.概念 这个算法是做图像处理的抽骨架处理,目的是求出图像的骨架,可以想象一片与物体形状相同的草,沿其外围各点同时点火.当火势向内蔓延,向前推进的火线相遇处各点的轨迹就是中 ...
- 第三期 第三期 搜索——1.运动规划(motion_planing)
运动规划的根本问题在于机器人可能存在于一个这样的世界中, 它可能想找到一条到达这个目标的路径,那么就需要指定一个到达那里的计划, 自动驾驶汽车也会遇到这个问题.他可能处于高速公路的附近的街道网络中,他 ...
- 自动驾驶运动规划-Reeds Shepp曲线
自动驾驶运动规划-Reeds Shepp曲线 相比于Dubins Car只允许车辆向前运动,Reeds Shepp Car既允许车辆向前运动,也允许车辆向后运动. Reeds Shepp Car运动规 ...
随机推荐
- 最新版本 Stable Diffusion 开源 AI 绘画工具之汉化篇
目录 汉化预览 下载汉化插件一 下载汉化插件二 下载汉化插件三 开启汉化 汉化预览 在上一篇文章中,我们安装好了 Stable Diffusion 开源 AI 绘画工具 但是整个页面都是英文版的,对于 ...
- pcm音频的录制、播放及转换
操作系统 :Windows10_x64 pcm格式为原始音频数据,有时候会遇到需要录制.播放及转换的情况,这里记录下. 一.录制pcm音频 这里演示下使用Audacity进行pcm音频录音的过程. A ...
- pysimplegui之窗口大小,位子,主题等属性修改
重点 1finalize()或Window参数finalize=True 调用以强制窗口通过初始化的最后阶段.这将导致 tkinter 资源被分配,以便它们可以被修改.这也会导致您的窗口出现.如果您不 ...
- StampedLock:JDK1.8中新增,比ReadWriteLock还快的锁
摘要:StampedLock是一种在读取共享变量的过程中,允许后面的一个线程获取写锁对共享变量进行写操作,使用乐观读避免数据不一致的问题,并且在读多写少的高并发环境下,比ReadWriteLock更快 ...
- [ElasticSearch]修改开源安全组件Search Guard-6 用户密码
ES有很多的安全组件可用,例如: X-pack,Sarch Guard.但目前开源免费的,仅Search Guard. 1 前置条件 Elastic Search 6 服务安装成功,且成功运行. ES ...
- [Linux]查看硬件及操作系统信息
许多的软件产品对硬件及操作系统等环境是有具体要求的,那么这时候如何快速知晓目标机器的目标资源信息是较为频繁的操作. 命令 全部硬件及系统信息 dmidecode (软硬件全部信息) hostnamec ...
- AF_XDP技术简介
本文分享自天翼云开发者社区@<AF_XDP技术简介>,作者: l****n 一.概述 AF_XDP 是一项新增的,针对高性能数据包处理进行优化的地址族协议.本文档假设读者已经熟悉 BPF ...
- logstash增量同步mysql数据到es
本篇本章地址:https://www.cnblogs.com/Thehorse/p/11601013.html 今天我们来讲一下logstash同步mysql数据到es 我认为呢,logstash是众 ...
- 百度首页静态展示页面HTML+CSS
一直觉得百度首页很复杂的,有那么多的东西,跟这个博主学习了之后,仿写了一下,样式好像很简单 只设置的一些组件的高度而已,不得不说,CSS真是个好东西呀 话不多说,直接上代码 <!DOCTYPE ...
- [Pytorch框架] 1.1、Pytorch简介
文章目录 1.1 Pytorch 简介 1.1.1 PyTorch的由来 1.1.2 Torch是什么? 1.1.3 重新介绍 PyTorch 1.1.4 对比PyTorch和Tensorflow 1 ...