机器人学 —— 轨迹规划(Artificial Potential)

今天终于完成了机器人轨迹规划的最后一次课了,拜拜自带B - BOX 的 Prof. TJ Taylor.
最后一节课的内容是利用势场来进行轨迹规划。此方法的思路非常清晰,针对Configration Space 里面的障碍物进行 DT变换,用DT变换值作为罚函数的输入,让机器人尽可能的远离障碍物,同时再终点设计抛物面函数,让机器人有向终点靠近的趋势。最后所获得的就是机器人的一种可行运动轨迹。由于此轨迹是梯度下降的,并且罚函数是连续的,所以如果机器人不陷入局部最优,那么就可以获得全局最优路径(我本人不持这样的观点,二阶Hessian矩阵大写的不服,凭什么贪婪算法是最短路径?)
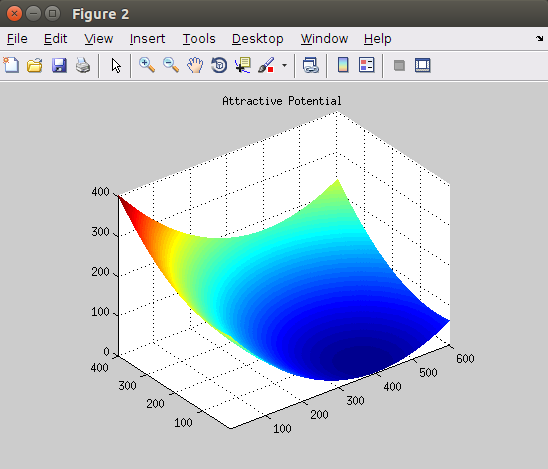
1、基于DT变换生成罚函数图
DT变换是2D2值图像中的一种算法,其作用是找到某像素到最近非0像素的距离。换言之,就是机器人到最近障碍物的距离。这种距离再机器人学运动中非常容易获得,只要有实时的距离传感器,就能够找到机器人再不同位置下,到最近障碍物的距离。从而生成 f - map (罚函数图)
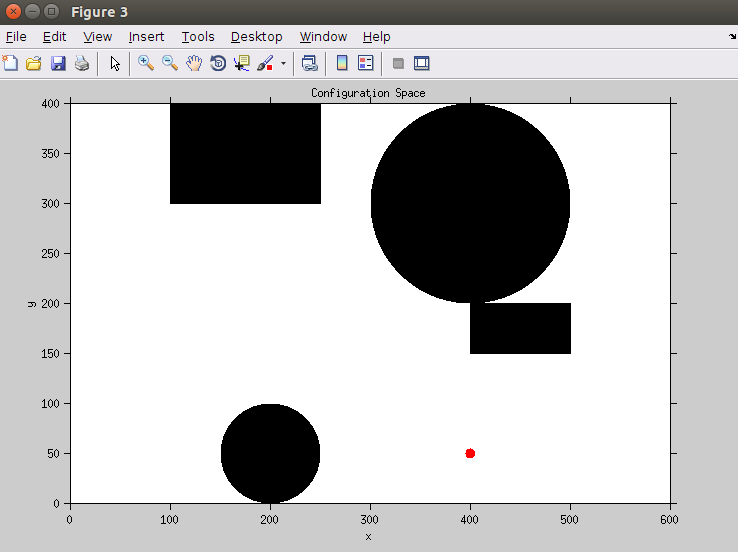
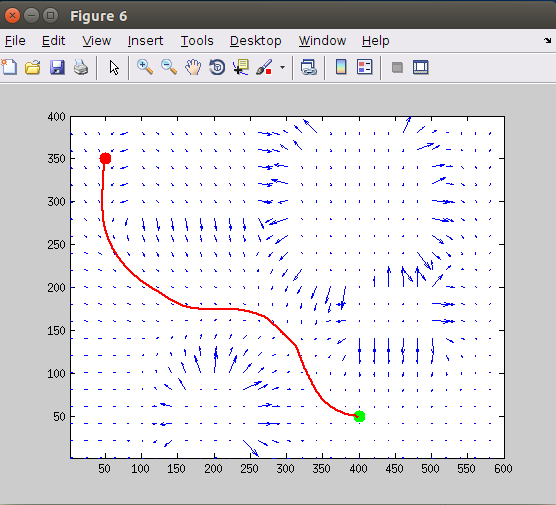
机器人的Configuration Space 与 f - map 如上图所示。
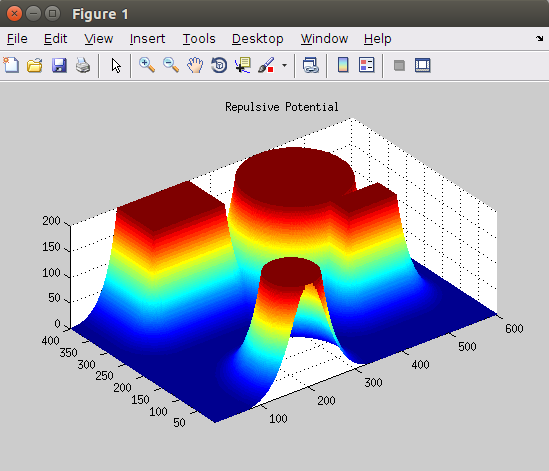
2、拉向终点的势
除了罚函数以外,机器人还需要一个拉向终点的势 —— Configuration Space 上一个以终点为中心的抛物面。将其与f - map 相加后,即可得到最终的Artificial Potential.
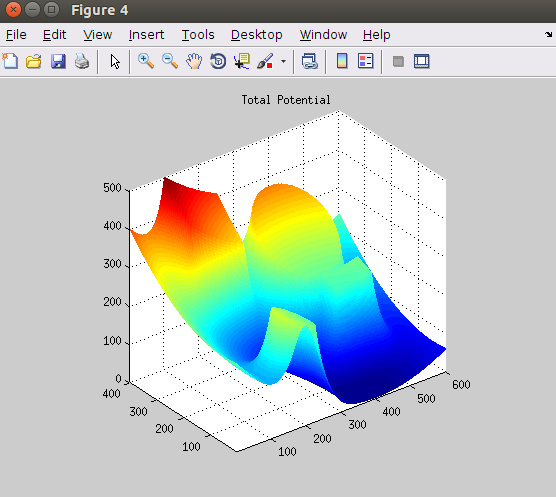
3、梯度下降
在Artificial Potential 上执行梯度下降算法,获得机器人运动轨迹。
4、总结
机器人轨迹规划是很有前景的学科,以后有前途的方向包括以下:
非同性机器人:无人汽车不能随时倒车
动力学约束下的规划:考虑机器人的加速减速
多机器人轨迹规划
针对移动障碍轨迹规划
针对不确定环境轨迹规划
机器人学 —— 轨迹规划(Artificial Potential)的更多相关文章
- 机器人学 —— 轨迹规划(Introduction)
轨迹规划属于机器人学中的上层问题,其主要目标是计划机器人从A移动到B并避开所有障碍的路线. 1.轨迹计划的对象 轨迹规划的对象是map,机器人通过SLAM获得地map后,则可在地图中选定任意两点进行轨 ...
- 机器人学 —— 轨迹规划(Sampling Method)
上一篇提到,机器人轨迹规划中我们可以在 Configuration Space 中运行A* 或者 DJ 算法.无论A* 还是DJ 算法,都必须针对邻域进行搜索,如果2自由度则有4邻域,2自由度则有8邻 ...
- 机器人学 —— 轨迹规划(Configuration Space)
之前的轨迹规划中,我们只考虑了质点,没有考虑机器人的外形与结构.直接在obstacle map 中进行轨迹规划,然而世纪情况中,机器人有固定外形,可能会和障碍物发生碰撞.此情况下,我们针对机器人自由度 ...
- 【2018.04.19 ROS机器人操作系统】机器人控制:运动规划、路径规划及轨迹规划简介之一
参考资料及致谢 本文的绝大部分内容转载自以下几篇文章,首先向原作者致谢,希望自己能在这些前辈们的基础上能有所总结提升. 1. 运动规划/路径规划/轨迹规划的联系与区别 https://blog.csd ...
- 机器人关节空间轨迹规划--S型速度规划
关节空间 VS 操作空间 关节空间与操作空间轨迹规划流程图如下(上标$i$和$f$分别代表起始位置initial和目标位置final): 在关节空间内进行轨迹规划有如下优点: 在线运算量更小,即无需进 ...
- 机器人中的轨迹规划(Trajectory Planning )
Figure. Several possible path shapes for a single joint 五次多项式曲线(quintic polynomial) $$\theta(t)=a_0+ ...
- zz自动驾驶中轨迹规划的探索和挑战
大家好,今天我们主要介绍一下轨迹规划的探索和挑战,我主要从四个方面介绍: 轨迹规划的概念 决策 横向规划 纵向规划 轨迹规划的概念: 轨迹规划的核心就是要解决车辆该怎么走的问题.比如我们知道了附近有行 ...
- Minimum Snap轨迹规划详解(2)corridor与时间分配
在上一篇文章中,我们得到的轨迹并不是很好,与路径差别有点大,我们期望规划出的轨迹跟路径大致重合,而且不希望有打结的现象,而且希望轨迹中的速度和加速度不超过最大限幅值.为了解决这些问题有两种思路: 思路 ...
- Minimum Snap轨迹规划详解(1)轨迹规划
一. 轨迹规划是什么? 在机器人导航过程中,如何控制机器人从A点移动到B点,通常称之为运动规划.运动规划一般又分为两步: 1.路径规划:在地图(栅格地图.四\八叉树.RRT地图等)中搜索一条从A点到B ...
随机推荐
- 查询当前Oracle数据库的实例
select name from v$database; select instance_name from v$instance; // 查看实例状态 >select instance_nam ...
- [转载]震惊!QWidget竟然可以嵌入到QML中,QMl窗口句柄竟然是这样获取
背景 记得在初学qml时,就被大佬告知Qml的实现有两种方式“view+item”和“engine+widow”,那么能不能将QWidget嵌入到QML中来呢,我收到的答案是不可以,原因是QML的 ...
- FPGA系列之一:Cyclone V中的时钟资源
之前的项目中更多的是有师兄提供经验和帮助,追求的是快速上手,所以不管对于硬件电路设计,还是verilog电路编程,甚至是FPGA内部的资源,都没来得及系统地学习,最近在做算法到电路的实现,正好系统学习 ...
- Python中文转拼音代码(支持全拼和首字母缩写)
本文的代码,从https://github.com/cleverdeng/pinyin.py升级得来,针对原文的代码,做了以下升级: 1 2 3 4 1.可以传入参数firstcode:如果为 ...
- 快速排序partition过程常见的两种写法+快速排序非递归实现
这里不详细说明快速排序的原理,具体可参考here 快速排序主要是partition的过程,partition最常用有以下两种写法 第一种: int mypartition(vector<int& ...
- 【Visual Studio】VS发布应用未能创建默认证书的问题解决方法
解决方法:点击你创建的项目 右键> 属性>签名>从存储区选择>选择证书这时候显示无可用证书 ,然后我从文件区选择了一个结果,又出现了第二个问题.提示我“签名时出错: 指定了无效 ...
- 借着Python-3来聊聊utf-8字符集
[关于文本文件] 文本文件也是以二进制序列的方式保存在磁盘中的,磁盘并不能保存文本:我们打开文本文件的时候之所以能看到文字,是因为 软件根据文件所用编码的字符集对文件进行解码的原因. [以utf-8字 ...
- App界面设计规范-字体规范
通过对不同类型的app进行总结,总结出app的字体规范. 一.字体选择 1.IOS:苹果ios 9系统开始,系统最新的默认中文字体是:苹方.英文字体是: San Francisco 2.Android ...
- (转)PyCharm报错:“No R interpreter defined: Many R……”——解决办法
报错截图: 下载安装链接:The Comprehensive R Archive Network
- PNG、 JPG图片压缩方法
参考链接 https://tinypng.com/developers/reference/python 1.安装 pip install --upgrade tinify 2.使用python脚本压 ...