第四节,目标检测---YOLO系列
1、R-CNN回顾

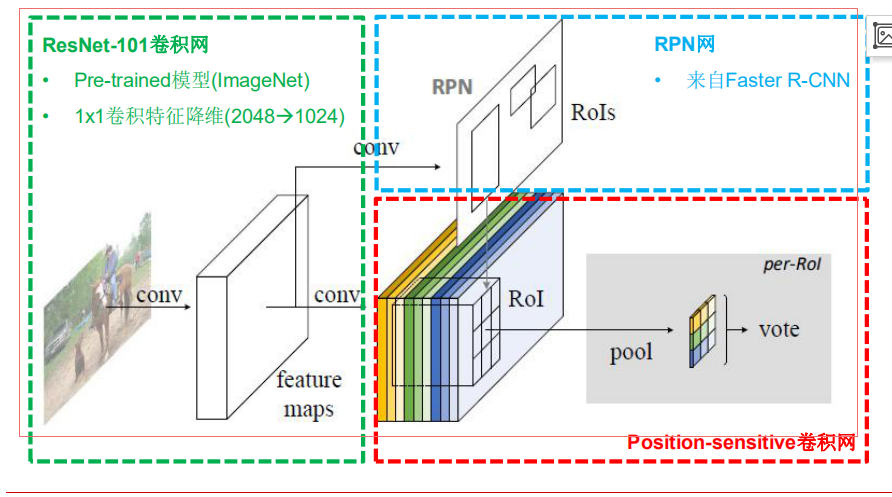
适应全卷积化CNN结构,提出全卷积化设计
- 共享ResNet的所有卷积层
- 引入变换敏感性(Translation variance)
- 位置敏感分值图(Position-sensitive score maps)
- 特殊设计的卷积层
- Grid位置信息+类别分值
- 位置敏感池化(Position-sensitive RoI pooling)
- 无训练参数
- 无全连接网络的类别推断
- 位置敏感分值图(Position-sensitive score maps)
R-FCN的位置敏感卷积层
使用k2(C+1)个通道对(位置,类别)组合进行编码
- 类别:C个物体类+1个背景类
- 相对位置:kxk个Grid(k=3)
- 位置敏感分值图(Position-sensitive score maps)
- 每个分类k2个score map
- score map 尺寸=图片尺寸
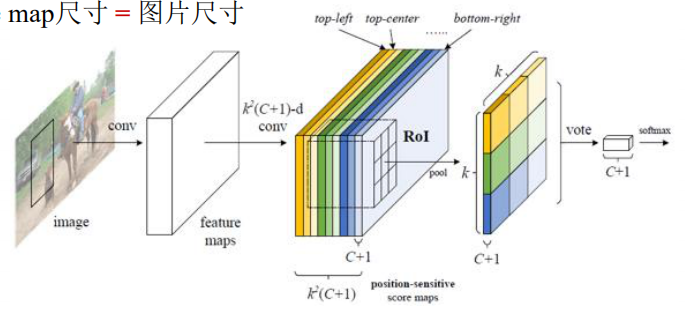
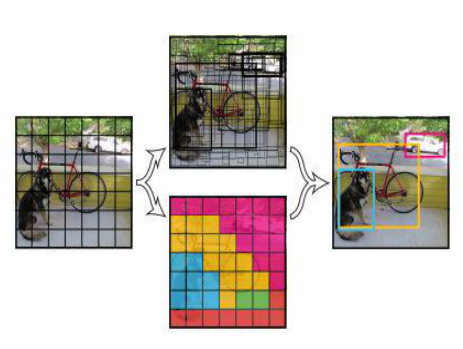
R-FCN的位置敏感RoI池化层
显式地编码相对位置信息
- 将wxh尺寸的RoI拆分成kxk个w/k x h/k尺寸的bin
- 不同(颜色)bin对应不同(颜色)通道层(score map)
- Bin内做均值池化
- 输出尺寸kxkx(C+1)
R-FCN的多任务损失函数

2、YOLO v1:GoogLeNet前20层
YOLO将物体检测任务当作一个regression问题来处理,通过YOLO,每张图像只需要“看一眼”就能得出图像中都有哪些物体和这些物体的位置。
- 将图像resize到448x448作为神经网络的输入,
- 使用一个神经网络,直接从一整张图像来预测出bbox的坐标、box中包含物体的置信度和物体的可能性,
- 然后进行非极大值抑制,筛选Boxes。
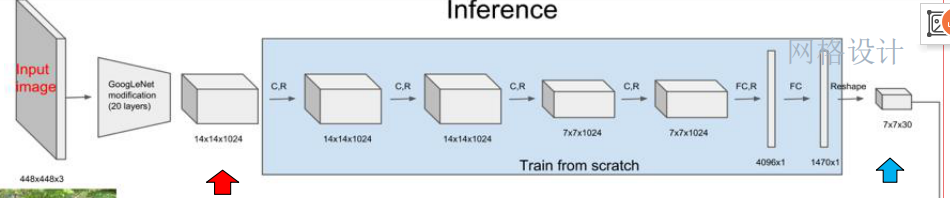
- 首先利用ImageNet 1000-class的分类任务数据集Pretrain卷积层,使用GoogLeNet中的前20个卷积层,加上一个average-pooling layer,最后加一个全连接层,作为Pretrain的网络。
- 将Pretrain的结果的前20层卷积层应用到Detection中,并加入剩下的4个卷积层及2个全连接层。
- 同时为了获取更精细化的结果,将输入图像的分辨率由224x224提升到448x448。
- 将所有的预测结果都归一化到0~1,使用Leaky RELU作为激活函数。
- 为了防止过拟合,在第一个全连接层后面接了一个ratio=0.5的Dropout层。
- YOLO网络结构由24个卷积层与2个全连接层构成,网络入口为448x448,图片进入网络先经过resize,网络的输出结果为一个张量。
- 输出维度:S*S*(B*5+C)
- 在Pascal VOC上,预测的结果维度是7*7*(2*5+20):其中S为划分网格数,B为每个网格负责目标个数,C为类别个数。
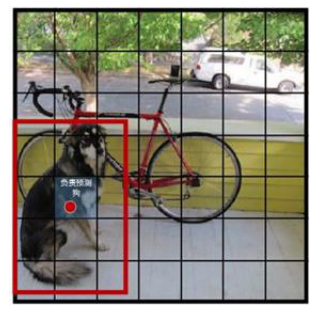
将一幅图像分成SxS个网格(grid cell),图中物体“狗”的中心点(红色原点)落入第5行、第2列的格子内,所以这个格子负责预测图像中的狗。
每一个栅格预测B(B=2)个bboxes,以及这些bboxes的confidence scores。
confidence scores反映了模型对于这个栅格的预测:该栅格是否含有物体,以及这个box的坐标预测的有多准。

如果这个栅格中不存在object,则confidence score应该为0;否则的话,confidence score则为predicted bound ing box与ground truth box之间的IoU(intersection over union)
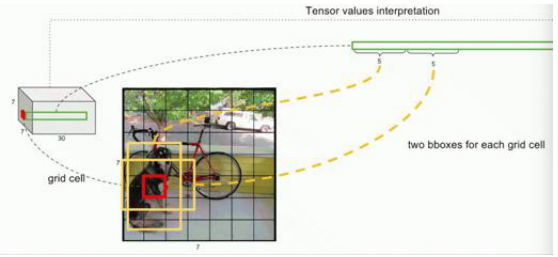
- YOLO v1:每个栅格两个bbox:横向和纵向各有一个框,根据匹配情况选择合适的框;对每个bbox有5个预测值:x,y,w,h,confidence;作为预测的结果(生成的7*7*30的张量)每一行中前10个元素,后20个元素对应于20个类别的概率。
- 每一个栅格还要预测C条件类别概率(conditional class probability):Pr(Classi|Object)。即在一个栅格包含一个Object的前提下,它属于某个类的概率。
- 条件类别概率:是针对每个栅格的。
- Confidence:是针对每个bbox的。
- 在测试阶段,将每个栅格的条件类别概率与你每个bbox的confidence相乘:

NMS(非极大值抑制):
- 首先从所有的检测框中找到置信度最大的那个框;
- 然后挨个计算其余剩余框的IoU,如果其值大于一定阈值(重合度过高),那么就将该框剔除;
- 之后对剩余的检测框重复上述过程,直到处理完所有的检测框。
YOLO v1的优点:
- 检测物体的速度很快;
- 假阳性率低;
- 能够学到更加抽象的物体的特征
YOLO v1的不足:
- YOLO的物体检测精度低于其他state-of-the-art的物体检测系统;
- YOLO容易产生物体的定位错误;
- YOLO对小物体的检测效果不好(尤其是密集的小物体,因为一个栅格只能预测2个物体)。
3、YOLO v2改进
- Batch Normalization
- Batch Normalization可以提高模型收敛速度,减少过拟合,在所有卷积层都应用了BN,是结果提升了2%。
- High Resolution Classifier
- 基于ImageNet数据集预训练模型,大部分类器输入图像尺寸小于256x256;
- 在YOLO v2中,首先采用448*448分辨率的ImageNet数据fine tune使网络适应高分辨率 输入;
- 然后将该网络用于目标检测任务finetune。高分辨率输入使结果提升了4%mAP。
- Convolutional With Anchor Boxes
- 借鉴了Faster R-CNN中的anchor思想,用anchor boxes来预测bounding boxes。准确率只有小幅度的下降,而召回率则提升了7%。
- Dimension Clusters
- 使用了K-means聚类方法类训练bounding boxes,可以自动找到更好的boxes宽高维度。
- Multi-Scale Training
- 模型只包含卷积层和pooling层,因此可以随时改变输入尺寸。每经过10次训练,就会随机选择新的图片尺寸进行训练。
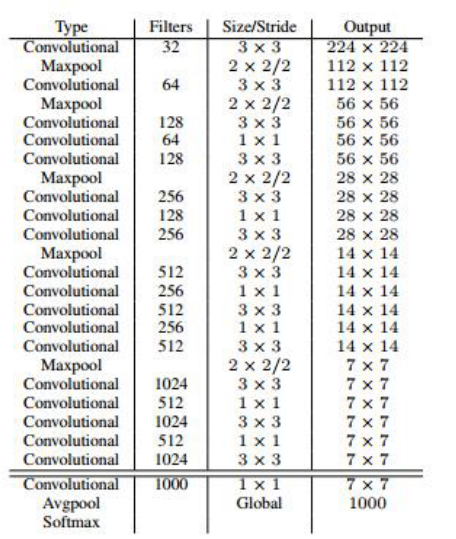
YOLO v2的基础模型是Darknrt-19:
使用较多的3*3卷积核,在每一次池化操作后把通道数翻倍。
网络使用了全局平均池化,把1*1的卷积核置于3*3的卷积核之间,用来压缩特征。
使用了BN稳定模型训练。
4、YOLO v3
YOLO v3中使用了一个53层的卷积网络,这个网络由残差单元叠加而成。
YOLO v3使用逻辑回归预测每个边界框的分数。
为了实现多标签分类,模型不再使用softmax函数作为最终的分类器,而是使用binary cross-entropy作为损失函数。
多尺度预测:YOLO v3从三种不同尺度夫人特征图谱上进行预测任务。
- 在Darknet-53得到的特征图的基础上,经过7个卷积得到第一个特征图谱,在这个特征图谱上做第一次预测。
- 然后从后向前获得倒数第3个卷积层的输出,进行一次卷积一次x2上采样,将上采样特征与第43个卷积特征连接,经过7个卷积得到第二个特征t图谱,在这个特征图谱上做第二次预测。
- 然后从后向前获得倒数第3个卷积层的输出,进行一次卷积一次x2上采样,将上采样特征与第26个卷积特征连接,经过7个卷积得到第三个特征图谱,在这个特征图谱上做第三次预测。
第四节,目标检测---YOLO系列的更多相关文章
- 小白也能弄得懂的目标检测YOLO系列之YOLOv1网络训练
上期给大家介绍了YOLO模型的检测系统和具体实现,YOLO是如何进行目标定位和目标分类的,这期主要给大家介绍YOLO是如何进行网络训练的,话不多说,马上开始! 前言: 输入图片首先被分成S*S个网格c ...
- 小白也能弄懂的目标检测YOLO系列之YOLOV1 - 第二期
上期给大家展示了用VisDrone数据集训练pytorch版YOLOV3模型的效果,介绍了什么是目标检测.目标检测目前比较流行的检测算法和效果比较以及YOLO的进化史,这期我们来讲解YOLO最原始V1 ...
- 深度学习笔记之目标检测算法系列(包括RCNN、Fast RCNN、Faster RCNN和SSD)
不多说,直接上干货! 本文一系列目标检测算法:RCNN, Fast RCNN, Faster RCNN代表当下目标检测的前沿水平,在github都给出了基于Caffe的源码. • RCNN RCN ...
- [目标检测]YOLO原理
1 YOLO 创新点: 端到端训练及推断 + 改革区域建议框式目标检测框架 + 实时目标检测 1.1 创新点 (1) 改革了区域建议框式检测框架: RCNN系列均需要生成建议框,在建议框上进行分类与回 ...
- 目标检测-yolo
论文下载:http://arxiv.org/abs/1506.02640 代码下载:https://github.com/pjreddie/darknet 1.创新点 端到端训练及推断 + 改革区域建 ...
- (四)目标检测算法之Fast R-CNN
系列博客链接: (一)目标检测概述 https://www.cnblogs.com/kongweisi/p/10894415.html (二)目标检测算法之R-CNN https://www.cnbl ...
- [目标检测]RCNN系列原理
1 RCNN 1.1 训练过程 (1) 训练时采用fine-tune方式: 先用Imagenet(1000类)训练,再用PASCAL VOC(21)类来fine-tune.使用这种方式训练能够提高8个 ...
- 目标检测YOLO进化史之yolov1
yolov3在目标检测领域可以算得上是state-of-art级别的了,在实时性和准确性上都有很好的保证.yolo也不是一开始就达到了这么好的效果,本身也是经历了不断地演进的. yolov1 测试图片 ...
- 目标检测YOLO算法-学习笔记
算法发展及对比: 17年底,mask-R CNN YOLO YOLO最大的优势就是快 原论文中流程,可以检测出20类物体. 红色网格-张量,在这样一个1×30的张量中保存的数据 横纵坐标中心点缩放到0 ...
随机推荐
- Spring Security(三十五):Part III. Testing
This section describes the testing support provided by Spring Security. 本节介绍Spring Security提供的测试支持. ...
- c++面经积累<2>
4.类成员初始化方式:列表初始化和赋值初始化 赋值初始化通过在函数体内进行赋值,列表初始化,在构造函数后面加上冒号,使用初始化列表进行初始化.在函数体内进行初始化,是在所有的数据成员被分配内存空间后进 ...
- 采用ADM2483磁隔离器让RS485接口更简单更安全
采用ADM2483磁隔离器让RS485接口更简单更安全 摘要:本文介绍RS485的特点及应用,指出了普通RS485接口易损坏的问题,针对存在的问题介绍了以ADM2483为核心的磁隔离解决方案. 关键词 ...
- 深度理解 React Suspense(附源码解析)
本文介绍与 Suspense 在三种情景下使用方法,并结合源码进行相应解析.欢迎关注个人博客. Code Spliting 在 16.6 版本之前,code-spliting 通常是由第三方库来完成的 ...
- 程序员如何开始做一个自己的 Side Project?
此系列文章我们开始聊一些软件开发人员如何开始动手写一些自己项目(Side Project)的思路与方法,以及过程中可能需要准备的知识,并分享一些相关的资源给大家. 1. 什么是 Side Projec ...
- 家庭记账本小程序之java代码部分(java web基础版二)
1.连接数据库 package util; import java.sql.Connection; import java.sql.DriverManager; import java.sql.Res ...
- 【学习总结】GirlsInAI ML-diary day-8-list列表
[学习总结]GirlsInAI ML-diary 总 原博github链接-day8 认识list列表 新的数据类型:list. list是一种有序的集合,可以随时添加和删除其中的元素(链表??) 1 ...
- 阿里云对象存储OSS与文件存储NAS的区别
一.简介 应用场景:选择一款存储产品,面向文档数据的存取,不会涉及到数据处理. 产品选型主要从OSS和NAS中选择一款,满足文档存储的需求. 二.NAS优缺点 NAS 是一种采用直接与网络介质相连的特 ...
- koa-session 记录当前会话内容
最近做毕设需要在nodejs服务器下记录当前用户账号,所用的node框架是koa,所以相对应配套的用了koa-session,发现和之前学的session差不多,都是会话级别的. 一.session和 ...
- MT【321】分类线性规划
若二次函数$f(x)=ax^2+bx+c(a,b,c>0)$有零点,则$\min\{\dfrac{b+c}{a},\dfrac{c+a}{b},\dfrac{a+b}{c}\}$ 的最大值为__ ...