[Reinforcement Learning] Model-Free Prediction
上篇文章介绍了 Model-based 的通用方法——动态规划,本文内容介绍 Model-Free 情况下 Prediction 问题,即 "Estimate the value function of an unknown MDP"。
- Model-based:MDP已知,即转移矩阵和奖赏函数均已知
- Model-Free:MDP未知
蒙特卡洛学习
蒙特卡洛方法(Monte-Carlo Methods,简称MC)也叫做蒙特卡洛模拟,是指使用随机数(或更常见的伪随机数)来解决很多计算问题的方法。其实本质就是,通过尽可能随机的行为产生后验,然后通过后验来表征目标系统。
如下图为使用蒙特卡罗方法估算 \(\pi\) 值,放置30000个随机点后,\(\pi\) 的估算值与真实值相差0.07%。
在Model-Free的情况下,MC在强化学习中的应用就是获取价值函数,其特点如下:
- MC 可以从完整的 episodes 中学习(no bootstrapping)
- MC 以均值来计算价值,即 value = mean(return)
- MC 只能适用于 episodic MDPs(有限MDPs)
First-Visit 蒙特卡洛策略评估
First-Visit Monte-Carlo Policy Evaluation:
评估状态 \(s\) 在给定策略 \(\pi\) 下的价值函数 \(v_{\pi}(s)\) 时,在一次 episode 中,状态 \(s\) 在时刻 \(t\) 第一次被访问时,计数器 \(N(s) ← N(s) + 1\),累计价值 \(S(s) ← S(s) + G_t\)
当整个过程结束后,状态 \(s\) 的价值 \(V(s) = \frac{S(s)}{N(s)}\)
根据大数定理(Law of Large Numbers):\(V(s) → v_{\pi}(s) \text{ as } N(s) → \infty\)
Every-Visit 蒙特卡洛策略评估
Every-Visit Monte-Carlo Policy Evaluation:
评估状态 \(s\) 在给定策略 \(\pi\) 下的价值函数 \(v_{\pi}(s)\) 时,在一次 episode 中,状态 \(s\) 在时刻 \(t\) 每次被访问时,计数器 \(N(s) ← N(s) + 1\),累计价值 \(S(s) ← S(s) + G_t\)
当整个过程结束后,状态 \(s\) 的价值 \(V(s) = \frac{S(s)}{N(s)}\)
根据大数定理(Law of Large Numbers):\(V(s) → v_{\pi}(s) \text{ as } N(s) → \infty\)
Incremental Monte-Carlo
我们先看下增量式求平均:
The mean \(\mu_1, \mu_2, ...\) of a sequence \(x_1, x_2, ...\) can be computed incrementally:
\[
\begin{align}
\mu_k
&= \frac{1}{k}\sum_{j=1}^{k}x_j\\
&= \frac{1}{k}\Bigl(x_k+\sum_{j=1}^{k-1}x_j \Bigr)\\
&= \frac{1}{k}(x_k + (k-1)\mu_{k-1})\\
&= \mu_{k-1} + \frac{1}{k}(x_k - \mu_{k-1})
\end{align}
\]
根据上式我们可以得出增量式进行MC更新的公式:
每次 episode 结束后,增量式更新 \(V(s)\),对于每个状态 \(S_t\),其对应的 return 为 \(G_t\)
\[
N(S_t) ← N(S_t) + 1 \\
V(S_t) ← V(S_t) + \frac{1}{N(S_t)}(G_t - V(S_t))
\]
在非静态问题中,更新公式形式可以改为如下:
\[V(S_t) ← V(S_t) + \alpha (G_t - V(S_t))\]
时序差分学习
时序差分方法(Temporal-Difference Methods,简称TD)特点:
- TD 可以通过 bootstrapping 从非完整的 episodes 中学习
- TD updates a guess towards a guess
TD(λ)
下图为 TD target 在不同 n 下的示意图:
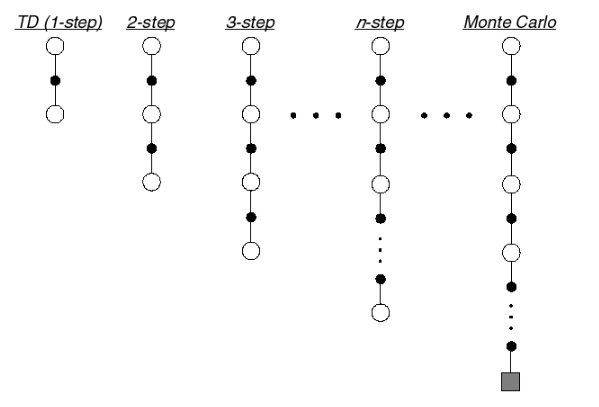
从上图可以看出,当 n 达到终止时,即为一个episode,此时对应的方法为MC,因此从这个角度看,MC属于TD的特殊情况。
n-step Return
n-step returns 可以表示如下:
\(n=1\) 时:\(G_{t}^{(1)} = R_{t+1} + \gamma V(S_{t+1})\)
\(n=2\) 时:\(G_{t}^{(2)} = R_{t+1} + \gamma R_{t+2} + \gamma^2 V(S_{t+2})\)
...
\(n=\infty\) 时:\(G_{t}^{\infty} = R_{t+1} + \gamma R_{t+2} + ... + \gamma^{T-1} R_T)\)
因此,n-step return \(G_{t}^{(n)} = R_{t+1} + \gamma R_{t+2} + ... + \gamma^{n}V(S_{t+n}))\)
n-step TD 更新公式:
\[V(S_t) ← V(S_t) + \alpha (G_t^{(n)} - V(S_t))\]
Forward View of TD(λ)
我们能否把所有的 n-step return 组合起来?答案肯定是可以,组合后的return被称为是\(\lambda\)-return,其中\(\lambda\)是为了组合不同的n-step returns引入的权重因子。
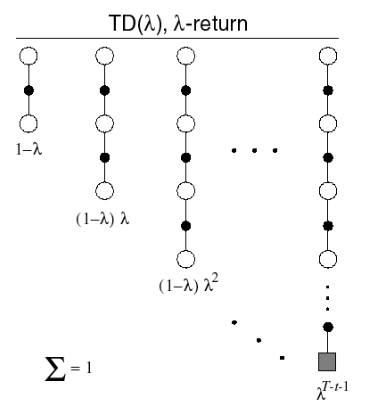
\(\lambda\)-return:
\[G_t^{\lambda} = (1-\lambda)\sum_{n=1}^{\infty}\lambda^{n-1}G_t^{(n)}\]
Forward-view TD(\(\lambda\)):
\[V(S_t) ← V(S_t) + \alpha\Bigl(G_t^{\lambda} - V(S_t)\Bigr)\]
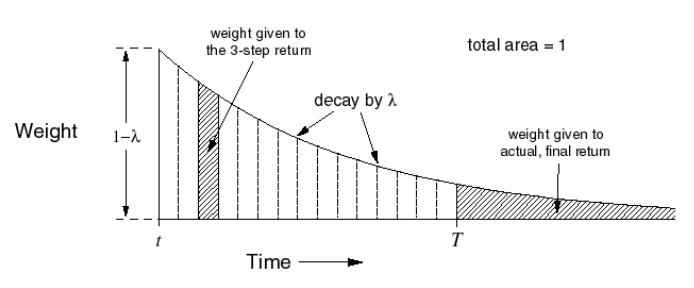
TD(\(\lambda\))对应的权重公式为 \(( 1-\lambda)\lambda^{n-1}\),分布图如下所示:
Forward-view TD(\(\lambda\))的特点:
- Update value function towards the λ-return
- Forward-view looks into the future to compute \(G_t^{\lambda}\)
- Like MC, can only be computed from complete episodes
Backward View TD(λ)
- Forward view provides theory
- Backward view provides mechanism
- Update online, every step, from incomplete sequences
带有资格迹的TD(\(\lambda\)):
\[
\delta_t = R_{t+1} + \gamma V(S_{t+1} - V(S_t))\\
V(s) ← V(s) + \alpha \delta_t E_t(s)
\]
其中\(\delta_t\)为TD-error,\(E_t(s)\)为资格迹。
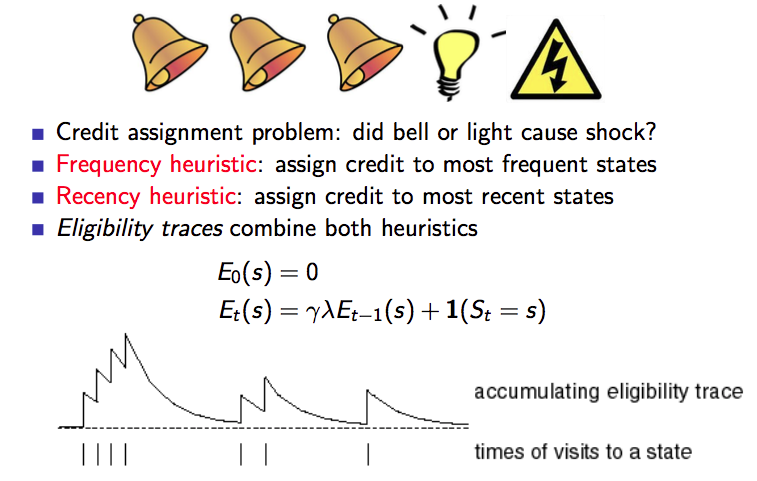
资格迹(Eligibility Traces)
资格迹本质就是对于频率高的,最近的状态赋予更高的信任(credit)/ 权重。
下图是对资格迹的一个描述:
关于TD(\(\lambda\))有一个结论:
The sum of offline updates is identical for forward-view and backward-view TD(λ).
这一块的内容不再深入介绍了,感兴趣的可以看Sutton的书和David的教程。
蒙特卡洛学习 vs. 时序差分学习
MC与TD异同点
相同点:都是从经验中在线的学习给定策略 \(\pi\) 的价值函数 \(v_{\pi}\)
不同点:
- Incremental every-visit Monte-Carlo:朝着真实的 return \(\color{Red}{G_t}\) 更新 \(V(S_t)\)
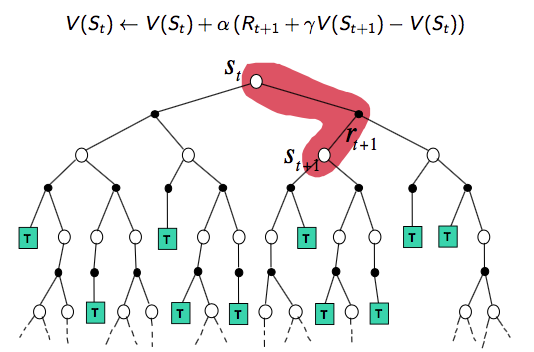
\[V(S_t) ← V(S_t) + \alpha (\color{Red}{G_t} - V(S_t))\] - Simplest temporal-difference learning algorithm: TD(0)
- 朝着已预估的 return \(\color{Red}{R_{t+1} + \gamma V(S_{t+1})}\) 更新 \(V(S_t)\)
\[V(S_t) ← V(S_t) + \alpha (\color{Red}{R_{t+1} + \gamma V(S_{t+1})} - V(S_t))\] - \(\color{Red}{R_{t+1} + \gamma V(S_{t+1})}\) 称为是 TD target
- \(\color{Red}{R_{t+1} + \gamma V(S_{t+1})} - V(S_t)\) 称为是 TD error
- 朝着已预估的 return \(\color{Red}{R_{t+1} + \gamma V(S_{t+1})}\) 更新 \(V(S_t)\)
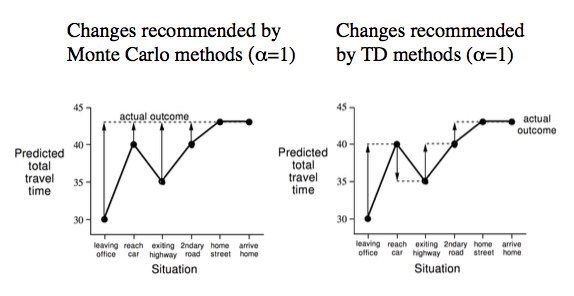
下图以 Drive Home 举例说明两者的不同,MC 只能在回家后才能改变对回家时间的预判,而 TD 在每一步中不断根据实际情况来调整自己的预判。
MC与TD优缺点
学习方式
- TD 可以在知道最后结果之前学习(如上图举例)
- TD can learn online after every step
- MC must wait until end of episode before return is known
- TD 可以在不存在最后结果的情况下学习(比如无限/连续MDPs)
- TD can learn from incomplete sequences
- MC can only learn from complete sequences
- TD works in continuing (non-terminating) environments
- MC only works for episodic (terminating) environments
方差与偏差
- MC has high variance, zero bias(高方差,零偏差)
- Good convergence properties
- Not very sensitive to initial value
- Very simple to understand and use
- TD has low variance, some bias(低方差,存在一定偏差)
- Usually more efficient than MC
- TD(0) converges to \(v_{\pi}(s)\)
- More sensitive to initial value
关于 MC 和 TD 中方差和偏差问题的解释:
- MC 更新基于真实的 return \(G_t = R_{t+1} + \gamma R_{t+2} + ... + \gamma^{T-1}R_{T}\) 是 \(v_{\pi}(S_t)\) 的无偏估计。
- 真实的TD target \(R_{t+1} + \gamma v_{\pi}(S_{t+1})\) 也是 \(v_{\pi}(S_t)\) 的无偏估计。但是实际更新时用的 TD target \(R_{t+1} + \gamma V(S_{t+1})\) 是 \(v_{\pi}(S_t)\) 的有偏估计。
- TD target 具有更低的偏差:
- Return 每次模拟依赖于许多的随机动作、转移概率以及回报
- TD target 每次只依赖一次随机动作、转移概率以及回报
马尔可夫性
- TD exploits Markov property
- Usually more efficient in Markov environments
- MC does not exploit Markov property
- Usually more effective in non-Markov environments
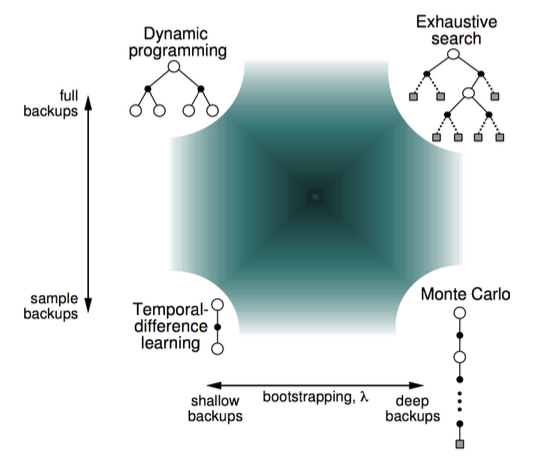
DP、MC以及TD(0)
首先我们从 backup tree 上去直观地认识三者的不同。
DP backup tree:Full-Width step(完整的step)
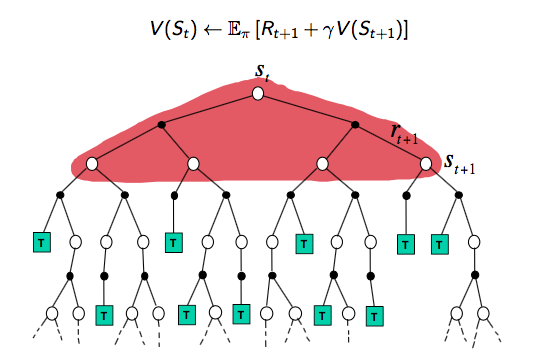
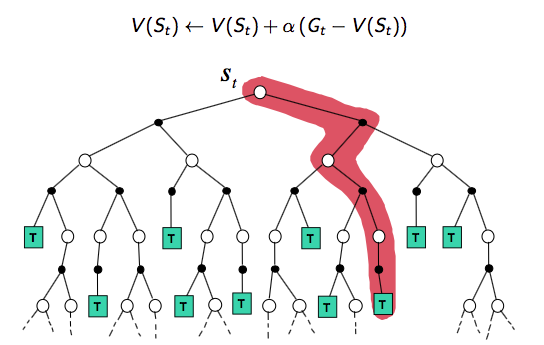
MC backup tree:完整的episode
TD(0) backup tree:单个step
Bootstrapping vs. Sampling
Bootstrapping:基于已预测的值进行更新
- DP bootstraps
- MC does not bootstrap
- TD bootstraps
Sampling:基于采样的期望来更新
- DP does not sample(model-based methods don't need sample)
- MC samples(model-free methods need sample)
- TD samples(model-free methods need sample)
下图从宏观的视角显示了 RL 的几种基本方法的区别:
Reference
[1] 维基百科-蒙特卡洛方法
[2] Reinforcement Learning: An Introduction, Richard S. Sutton and Andrew G. Barto, 2018
[3] David Silver's Homepage
[Reinforcement Learning] Model-Free Prediction的更多相关文章
- A neural reinforcement learning model for tasks with unknown time delays
郑重声明:原文参见标题,如有侵权,请联系作者,将会撤销发布! Abstract 我们提出了一个基于生物学的神经模型,能够在复杂的任务中执行强化学习.该模型的独特之处在于,它能够在一个动作.状态转换和奖 ...
- Understanding dopamine and reinforcement learning: The dopamine reward prediction error hypothesis
郑重声明:原文参见标题,如有侵权,请联系作者,将会撤销发布! Abstract 在中脑多巴胺能神经元的研究中取得了许多最新进展.要了解这些进步以及它们之间的相互关系,需要对作为解释框架并指导正在进行的 ...
- (zhuan) Deep Reinforcement Learning Papers
Deep Reinforcement Learning Papers A list of recent papers regarding deep reinforcement learning. Th ...
- 《DRN: A Deep Reinforcement Learning Framework for News Recommendation》强化学习推荐系统
摘要 新闻推荐系统中,新闻具有很强的动态特征(dynamic nature of news features),目前一些模型已经考虑到了动态特征. 一:他们只处理了当前的奖励(ctr);. 二:有一些 ...
- 论文笔记:Learning how to Active Learn: A Deep Reinforcement Learning Approach
Learning how to Active Learn: A Deep Reinforcement Learning Approach 2018-03-11 12:56:04 1. Introduc ...
- 18 Issues in Current Deep Reinforcement Learning from ZhiHu
深度强化学习的18个关键问题 from: https://zhuanlan.zhihu.com/p/32153603 85 人赞了该文章 深度强化学习的问题在哪里?未来怎么走?哪些方面可以突破? 这两 ...
- [转]Introduction to Learning to Trade with Reinforcement Learning
Introduction to Learning to Trade with Reinforcement Learning http://www.wildml.com/2018/02/introduc ...
- Introduction to Learning to Trade with Reinforcement Learning
http://www.wildml.com/2015/12/implementing-a-cnn-for-text-classification-in-tensorflow/ The academic ...
- Machine Learning Algorithms Study Notes(5)—Reinforcement Learning
Reinforcement Learning 对于控制决策问题的解决思路:设计一个回报函数(reward function),如果learning agent(如上面的四足机器人.象棋AI程序)在决定 ...
随机推荐
- Kali Linux入坑之基本配置(2018.1)
我在?天前就决心如Kali的坑,然而安装kali呀vm tools呀更新呀弄了好几天.期间出现的各种问题在此汇总一下. 1.Kali的安装版本选择 在官网上看到的这么多Kali版本应该怎么选呢,在网上 ...
- matlab导入txt数据画图
因为最近需要观察txt保存的一堆数据,则需要使用这些数据画图.强大的matlab分分钟解决了. 实例数据:data.txt 步骤: ①打开matlab -> HOME(主页) -> Imp ...
- C++11のlambd表达式
在其他语言中,我们常见lambda表达式,c++11中也引入了. 利用Lambda表达式,可以方便的定义和创建匿名函数.今天,我们就来简单介绍一下C++中Lambda表达式的简单使用. 一.lambd ...
- resnet代码分析
1. 先导入使用的包,并声明可用的网络和预训练好的模型 import torch.nn as nn import torch.utils.model_zoo as model_zoo #声明可调用的网 ...
- 在Winform开发框架中下拉列表绑定字典以及使用缓存提高界面显示速度
在我们开发Winform界面的时候,往往需要绑定数据字典操作,也就是绑定一些下拉列表或者一些列表显示等,以便我们方便选择数据操作,常见的字典绑定操作就是对下拉列表的处理,本篇随笔是基于DevExpre ...
- [Alpha阶段]无人转会申请
Alpha阶段无人转会申请 大家好,我们是Water_T团队.我们团队在Alpha阶段较好完成了预期目标,团队成员合作愉快,氛围良好,配合默契,且完成的产品在alpha阶段中是用户可互动.可使用的功能 ...
- [安全转帖]浅析安全威胁情报共享框架OpenIOC
浅析安全威胁情报共享框架OpenIOC https://www.freebuf.com/sectool/86580.html Indicator of compromise Outline: 1. I ...
- html中title小图标的实现
<link rel="icon" href="picture.ico" type="image/x-icon"/> 注意:图片的 ...
- php Header 函数使用
<?php header('HTTP/1.1 200 OK'); // ok 正常访问 header('HTTP/1.1 404 Not Found'); //通知浏览器 页面不存在 heade ...
- jatoolsprinter html实现每隔几秒获取数据直接后台打印不弹窗
1.流程说明 jatoolspringter 必须要能在html代码里面看到 id =page1 page2 page3..... 才能打印,所以无法动态打印,必须先把要打印的内容放到页面某个地方隐 ...