Unity 用ml-agents机器学习造个游戏AI吧(2)(入门DEMO)
前言:上一篇博文已经介绍了Unity ml-agents的环境配置(https://www.cnblogs.com/KillerAery/p/10629963.html)了。
个人建议先敲demo再摸清概念比较容易上手,因此本文先提供一个demo示例简单阐述下。
由于过了差不多2年,Unity ml-agents项目API已经更新了很多,以前的demo教程已经不适合了,因此决定翻新Unity ml-agents机器学习系列博客。
本次示例:训练一个追踪红球的白球AI
1. 新建Unity项目,导入package
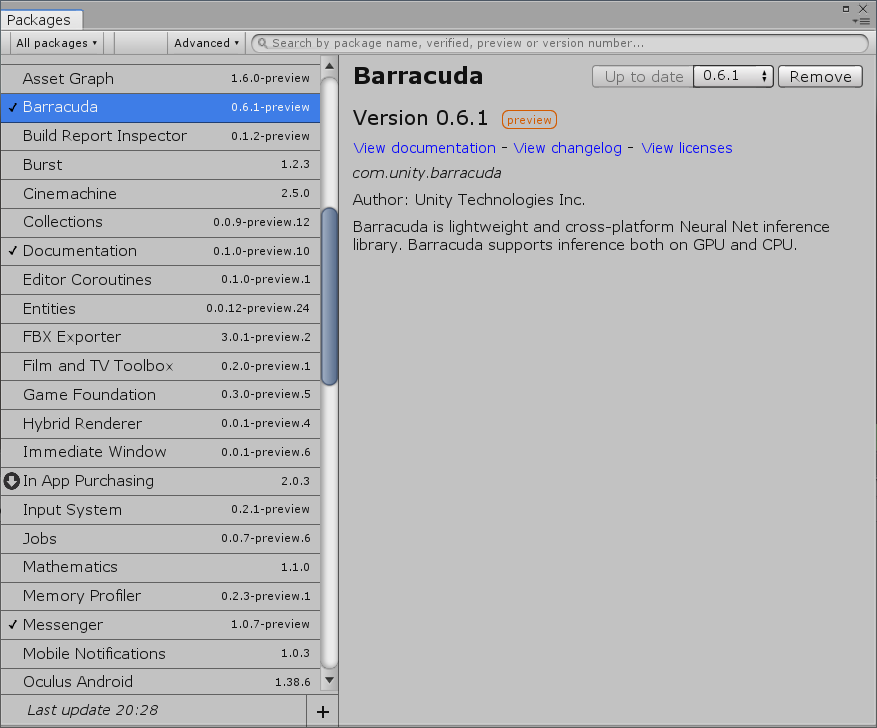
进入Unity项目,在上方 Window => Package Manager,,然后安装Barracuda这个package(如果没看见,一般就是没有显示All packages或没显示preview package):
并将之前下载的ml-agents项目com.unity.ml-agents目录下Editor、Plugin、Runtime复制进新建Unity项目里(建议放在Assets文件夹内)
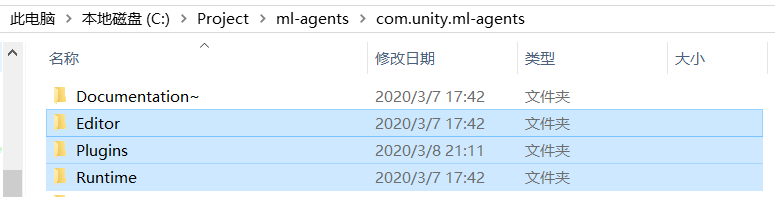
旧版本ml-agents项目UnitySDK文件夹已被分割为com.unity.ml-agents文件夹(Unity ml-agents包)和Project文件夹(示例项目,含若干个机器学习示例demo)。
2. 编写Agent脚本
RollerAgent 是将用于智能体对象的组件脚本:
//RollerAgent.cs
using UnityEngine;
using MLAgents;
using MLAgents.Sensors;
public class RollerAgent : Agent
{
public Transform Target;
public float speed = 10;
private Rigidbody rBody;
void Start()
{
rBody = GetComponent<Rigidbody>();
}
//收集观察结果
public override void CollectObservations(VectorSensor sensor)
{
//观察目标球和智能体的位置
sensor.AddObservation(Target.position);
sensor.AddObservation(this.transform.position);
//观察智能体的速度
sensor.AddObservation(rBody.velocity.x);
sensor.AddObservation(rBody.velocity.z);
//在这里因为目标球是不会动的,智能体也不会在y轴上又运动,所以没有必要观察这些值的变化。
//sensor.AddObservation(rBody.velocity.y);
}
//处理动作,并根据当前动作评估奖励值
public override void AgentAction(float[] vectorAction)
{
//------ 动作处理
// 接受两个动作数值
Vector3 controlSignal = Vector3.zero;
controlSignal.x = vectorAction[0];
controlSignal.z = vectorAction[1];
rBody.AddForce(controlSignal * speed);
//------ 奖励信号
float distanceToTarget = Vector3.Distance(this.transform.position, Target.position);
// 到达目标球
if (distanceToTarget < 1.42f)
{
//奖励值+1.0f
SetReward(1.0f);
Done();
}
// 掉落场景外
if (this.transform.position.y < 0)
{
Done();
}
}
//启发函数,玩家可手动操控智能体,用于手动调试智能体或启发模仿学习。
public override float[] Heuristic()
{
var action = new float[2];
action[0] = -Input.GetAxis("Horizontal");
action[1] = Input.GetAxis("Vertical");
return action;
}
//Reset时调用
public override void AgentReset()
{
if (this.transform.position.y < 0)
{
//如果智能体掉下去,则重置位置+重置速度
this.rBody.angularVelocity = Vector3.zero;
this.rBody.velocity = Vector3.zero;
this.transform.position = new Vector3(0, 0.5f, 0);
}
//将目标球重生至一个新的随机位置
Target.position = new Vector3(UnityEngine.Random.value * 8 - 4, 0.5f, UnityEngine.Random.value * 8 - 4);
}
}
Agent,即智能体,含有感知和行为——它通过观察环境然后做出相应的行为。在最常使用的强化学习里,智能体的训练模型类似一个黑盒。
每一次模拟步长中,智能体的感知会作为黑盒的输入,然后黑盒会输出行为选择,然后根据行为选择来让智能体做出行为。
当我们需要创建一个智能体类型时,让其继承Agent类,以用于重写智能体CollectObservations,AgentAction,AgentReset等方法。
CollectObservations()
- 每一个模拟步长都会被调用。
- 负责收集智能体的对环境的观察信息。
这部分类似于黑箱子的输入。值得注意的是,所需观察的信息越少越好。因此,我们需要尽可能减少不必要的观察信息,这会让训练变得更加快速、准确。
AgentAction()
- 每一个模拟步长都会被调用。
- 负责接受决策的行为选择从而让智能体做出行为。示例里,通过行为选择的2个float输入值来驱使球体移动,一旦掉出场景外,便调用Done()。
- 负责评估此步长的reward(奖励值)。示例里,只要触碰到目标球即可获得一定的reward。
如何根据实际问题设计reward往往是一个难点,设计的不好(例如部分奖励值过大)容易造成网络不收敛。
Heuristic()
- 通过玩家亲自操控智能体来输出行为选择。
亲自操控智能体可用于模仿学习或调试智能体的行为。
AgentReset()
- Done()被调用时,它才被调用。
- 负责重新设置场景,来准备下一次session。
当Done()被调用时,这意味着一次session的结束。然后深度强化学习模型评估整个session的reward并且重新设置场景,以准备下一次session。在示例里,为了让训练更加有效更加广泛化,因此给目标球设置的是随机位置(实际上智能体球也应该设置随机位置)。
3. 搭建好游戏场景
创建一个地板:
创建一个小球:
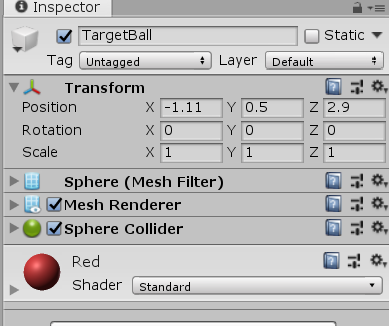
创建一个智能体(RollerAgent):
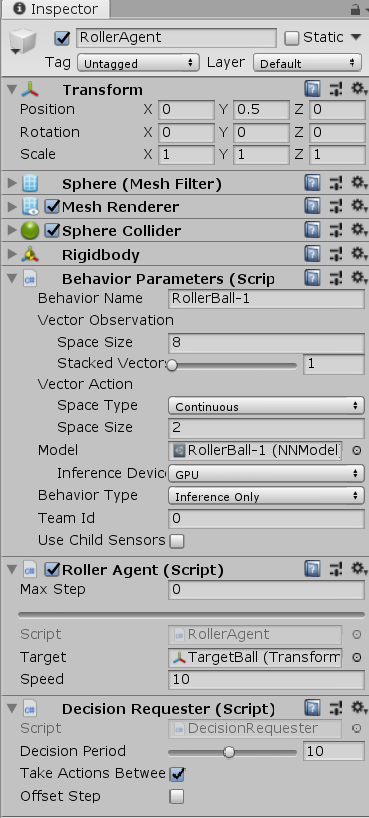
先创建一个带刚体的球体对象,然后我们需要给它挂载RollerAgent脚本(挂载后自动额外挂载BehaviorParameters脚本用于配置)和DecisionRequester脚本。
4. 调整脚本参数
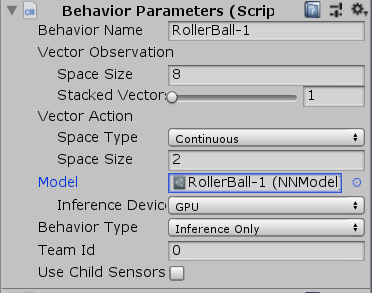
Behavior Parameters
每个Agent还必须得附带一个行为参数脚本,行为参数脚本用于定义智能体如何做出决策。
Vector Observation Space Size:观察信息的大小。在本示例中应调整为8,因为示例智能体脚本总共需要观察的特征元素为2个3D位置+2个1D速度,因此总共需要空间为8个float大小。
Vector Action Space Size:动作矢量的大小。在本示例中应调整为2,因为智能体脚本里接受2个浮点型动作输入。动作矢量的元素可以选择两种类型:一种是离散型的整型数值,适用于离散动作,例如下棋的位置选择;另一种则是连续性的浮点数值,适用于连续动作,例如3个float值可以代表一个施加到智能体刚体的力或力矩。
Inference Device:调整为GPU,从而使用GPU来训练。
Behavior Type:行为类型,主要有Default、Heuristic、Inference三种模式。
- Default:默认训练模式,用于一般的强化学习。
- Heuristic Only:启发模式,玩家亲自操控智能体,可用于模仿学习或调试游戏场景。
- Inference Only:推理模式,运行训练好的模型。
Roller Agent
Max Step:决定智能体最多可以有多少步决策,超过限制后则强制Done。特殊地,设置为0意思是不限制步数。在本示例中应调整为0。
Decision Requester
Decision Period:决策间隔。在本示例中应调整为10。
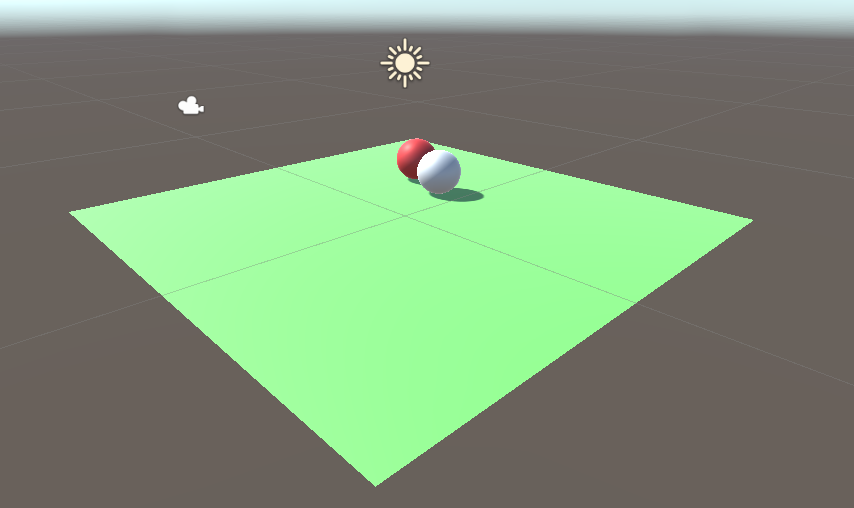
目前场景预览:

在这里,最好先Behavior Type切换成Heuristic Only模式用于调试游戏场景,运行Unity场景后可尝试自己用WASD键盘操控小球,测试游戏场景是否OK。然后确认无问题后再切换回Default。
5. 开始训练
然后现在可以打开开始菜单,直接使用cmd命令窗口,
cd到之前下载ml-agents项目的目录里
cd C:\Downloads\ml-agents
再输入激活ml-agents环境:
activate ml-agents
开启训练:
mlagents-learn config/config.yaml --run-id=RollerBall-1 --train
- config/config.yaml是训练配置文件,RollerBall-1是你给训练出来的模型取的名字
- 此外注意config/config.yaml是不存在的,可以自己仿照官方的示例yaml文件修改配置而新建的。
下面是config.yaml示例:
default:
trainer: ppo
batch_size: 10
beta: 5.0e-3
buffer_size: 100
epsilon: 0.2
gamma: 0.99
hidden_units: 128
lambd: 0.95
learning_rate: 3.0e-4
max_steps: 3.0e5
memory_size: 256
normalize: false
num_epoch: 3
num_layers: 2
time_horizon: 64
sequence_length: 64
summary_freq: 1000
use_recurrent: false
use_curiosity: false
curiosity_strength: 0.01
curiosity_enc_size: 128
reward_signals:
extrinsic:
strength: 1.0
gamma: 0.99
有关config参数具体配置将放在文末附录。

当出现如下画面:
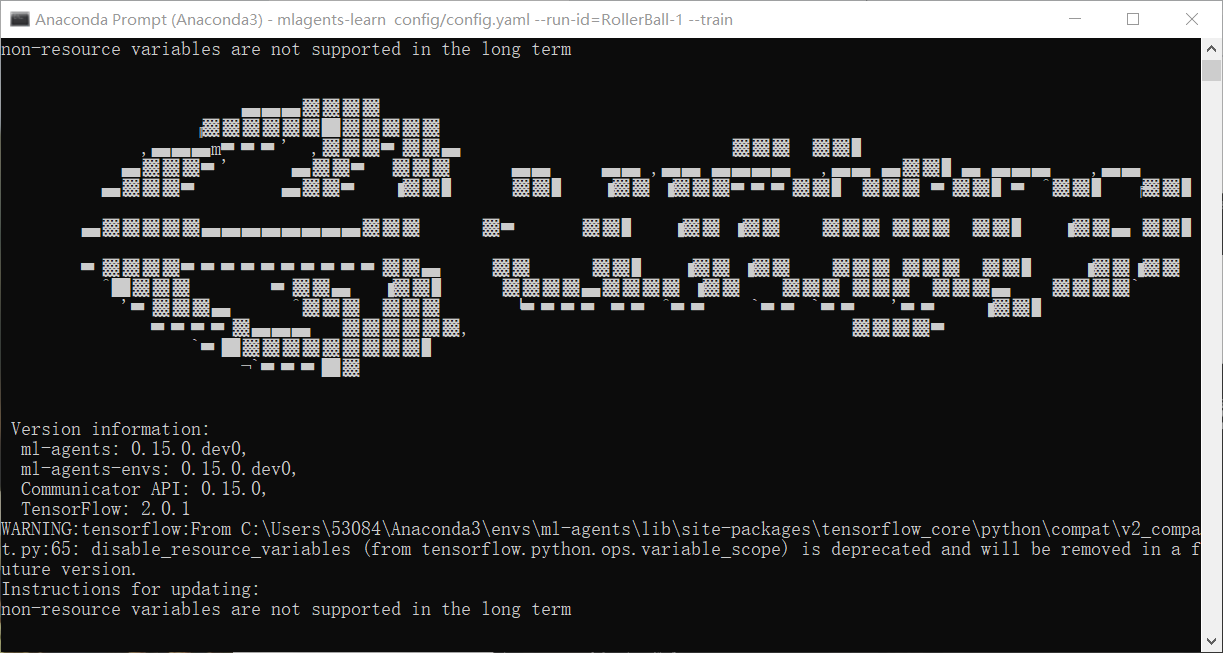
返还到Unity,点下运行键,那么你就会看到Unity执行训练。


你的命令窗口也会时刻告诉你训练阶段的信息:
- Step:模拟的步长次数
- Time Elapsed:所用时间
- Mean Reward:奖励平均值
- Std of Reward:奖励标准方差值
一般来说,随着训练的进行,奖励平均值越来越高,奖励标准方差值越来越低。这意味着智能体的行为越来越稳定趋向于获奖收益最高的行为。
现在可以去挂机等待结果了,亦或者在某个时间停止Unity场景运行。那么ml-agents会将目前为止训练出来的数据模型(.nn文件)保存到ml-agents\models目录下。
6. 将训练过的模型整合到Unity中

将训练出来的nn文件导入到Unity项目文件夹中,并在智能体Behavior Parameters脚本上的Model选择刚刚导入的nn文件;然后将Behavior Type调整为Inference Only。
运行Unity场景,看看你跑出来的模型的蠢样了(笑)。
附录
config文件配置
参数配置(翻修中):
| 参数名 | 描述 | 适用算法 |
|---|---|---|
| trainer | The type of training to perform: "ppo", "sac", "offline_bc" or "online_bc". | PPO, SAC |
| batch_size | The number of experiences in each iteration of gradient descent. | PPO, SAC |
| batches_per_epoch | In imitation learning, the number of batches of training examples to collect before training the model. | |
| beta | The strength of entropy regularization. | PPO |
| buffer_size | The number of experiences to collect before updating the policy model. In SAC, the max size of the experience buffer. | PPO, SAC |
| buffer_init_steps | The number of experiences to collect into the buffer before updating the policy model. | SAC |
| epsilon | Influences how rapidly the policy can evolve during training. | PPO |
| hidden_units | The number of units in the hidden layers of the neural network. | PPO, SAC |
| init_entcoef | How much the agent should explore in the beginning of training. | SAC |
| lambd | The regularization parameter. | PPO |
| learning_rate | The initial learning rate for gradient descent. | PPO, SAC |
| learning_rate_schedule | Determines how learning rate changes over time. | PPO, SAC |
| max_steps | The maximum number of simulation steps to run during a training session. | PPO, SAC |
| memory_size | The size of the memory an agent must keep. Used for training with a recurrent neural network. See Using Recurrent Neural Networks. | PPO, SAC |
| normalize | Whether to automatically normalize observations. | PPO, SAC |
| num_epoch | The number of passes to make through the experience buffer when performing gradient descent optimization. | PPO |
| num_layers | The number of hidden layers in the neural network. | PPO, SAC |
| behavioral_cloning | Use demonstrations to bootstrap the policy neural network. See Pretraining Using Demonstrations. | PPO, SAC |
| reward_signals | The reward signals used to train the policy. Enable Curiosity and GAIL here. See Reward Signals for configuration options. | PPO, SAC |
| save_replay_buffer | Saves the replay buffer when exiting training, and loads it on resume. | SAC |
| sequence_length | Defines how long the sequences of experiences must be while training. Only used for training with a recurrent neural network. See Using Recurrent Neural Networks. | PPO, SAC |
| summary_freq | How often, in steps, to save training statistics. This determines the number of data points shown by TensorBoard. | PPO, SAC |
| tau | How aggressively to update the target network used for bootstrapping value estimation in SAC. | SAC |
| time_horizon | How many steps of experience to collect per-agent before adding it to the experience buffer. | PPO, SAC |
| train_interval | How often to update the agent. | SAC |
| num_update | Number of mini-batches to update the agent with during each update. | SAC |
| use_recurrent | Train using a recurrent neural network. See Using Recurrent Neural Networks. | PPO, SAC |
- PPO = Proximal Policy Optimization
- SAC = Soft Actor-Critic
- BC = Behavioral Cloning (Imitation)
- GAIL = Generative Adversarial Imitaiton Learning
参考
另外一提,最新的介绍文档资料示例等都在Unity官方机器学习的github项目,感兴趣可以持续保持关注它的更新:
[1] Unity官方机器学习的github项目 https://github.com/Unity-Technologies/ml-agents
[2] Unity官方博客机器学习概念详解(1) https://blogs.unity3d.com/2017/12/11/using-machine-learning-agents-in-a-real-game-a-beginners-guide/
[3] Unity官方博客机器学习概念详解(2) https://blogs.unity3d.com/2017/06/26/unity-ai-themed-blog-entries/
[4] Unity ml-agents概念详解国内翻译博客 https://blog.csdn.net/u010019717/article/details/80382933
Unity 用ml-agents机器学习造个游戏AI吧(2)(入门DEMO)的更多相关文章
- Unity 用ml-agents机器学习造个游戏AI吧(1)(Windows环境配置)
前言:以前觉得机器学习要应用于游戏AI,还远得很. 最近看到一些资料后,突发兴致试着玩了玩Unity机器学习,才发觉机器学习占领游戏AI的可能性和趋势. Unity训练可爱柯基犬Puppo 机器学习训 ...
- 游戏AI之初步介绍(0)
目录 游戏AI是什么? 游戏AI和理论AI 智能的假象 (更新)游戏AI和机器学习 介绍一些游戏AI 4X游戏AI <求生之路>系列 角色扮演/沙盒游戏中的NPC 游戏AI 需要学些什么? ...
- 【使用Unity开发Windows Phone上的2D游戏】(1)千里之行始于足下
写在前面的 其实这个名字起得不太欠当,Unity本身是很强大的工具,可以部署到很多个平台,而不仅仅是可以开发Windows Phone上的游戏. 只不过本人是Windows Phone 应用开发出身, ...
- Unity教程之-基于行为树与状态机的游戏AI
AI.我们的第一印象可能是机器人,现在主要说在游戏中的应用.关于AI的相关文章我们在前面也提到过,详细请戳这现代的计算机游戏中已经大量融入了AI元素,平时我们进行游戏时产生的交互都是由AI来完成的.比 ...
- AI Boot Camp 分享之 ML.NET 机器学习指南
今天在中国七城联动,全球134场的AI BootCamp胜利落幕,广州由卢建晖老师组织,我参与分享了一个主题<ML.NET 机器学习指南和Azure Kinect .NET SDK概要>, ...
- 游戏AI之路径规划(3)
目录 使用路径点(Way Point)作为节点 洪水填充算法创建路径点 使用导航网(Navigation Mesh)作为节点 区域分割 预计算 路径查询表 路径成本查询表 寻路的改进 平均帧运算 路径 ...
- 游戏AI之决策结构—有限状态机/行为树(2)
目录 有限状态机 行为树 控制节点 条件节点 行为节点 装饰节点 总结 额外/细节/优化 游戏AI的决策部分是比较重要的部分,游戏程序的老前辈们留下了两种经过考验的用于AI决策的结构: 有限状态机 行 ...
- 做游戏长知识------基于行为树与状态机的游戏AI(一)
孙广东 2014.6.30 AI. 我们的第一印象可能是机器人,如今主要说在游戏中的应用. 现代的计算机游戏中已经大量融入了AI元素,平时我们进行游戏时产生的交互都是由AI来完毕的.比方在RPG游戏中 ...
- 游戏AI的综合设计
原地址:http://www.cnblogs.com/cocoaleaves/archive/2009/03/23/1419346.html 学校的MSTC要出杂志,第一期做游戏专题,我写了一下AI, ...
随机推荐
- Linux 下 Redis 安装与配置
1.Redis 的安装 在 Ubuntu 系统安装 redis 可以使用以下命令: $ sudo apt-get update $ sudo apt-get install redis-server ...
- 开发自己的 chart - 每天5分钟玩转 Docker 容器技术(167)
Kubernetes 给我们提供了大量官方 chart,不过要部署微服务应用,还是需要开发自己的 chart,下面就来实践这个主题. 创建 chart 执行 helm create mychart 的 ...
- .NET开发设计模式-单例模式
解释:单例模式主要特点:确保一个类只有一个实例,并提供一个访问它的全局访问点 意思就是说:在多线程的情况下:A先进行创建了该实例.B再进来访问时就不需要再创建了. using System; usin ...
- Python_ jiba、snownlp中文分词、pypinyin中文转拼音
import jieba #导入jieba模块 x = '分词的准确度直接影响了后续文本处理和挖掘算法的最终效果.' jieba.cut(x) #使用默认词库进行分词 print(list(jieba ...
- 【python3】如何建立爬虫代理ip池
一.为什么需要建立爬虫代理ip池 在众多的网站防爬措施中,有一种是根据ip的访问频率进行限制的,在某段时间内,当某个ip的访问量达到一定的阀值时,该ip会被拉黑.在一段时间内被禁止访问. 这种时候,可 ...
- Git的思想和基本工作原理2
那么,简单地说,Git 究竟是怎样的一个系统呢?请注意,接下来的内容非常重要,若是理解了 Git 的思想和基本工作原理,用起来就会知其所以然,游刃有余. 在开始学习 Git 的时候,请不要尝试把各种概 ...
- 阿里云被挖矿进程wnTKYg入侵的解决方法
杀wnTKYg病毒分两步,第一是找到它的来源,切断入口,第二步,找到它的守护进程并杀死,然后再去杀死病毒进程,有的守护进程很隐蔽,唤醒病毒之后,自动消亡,这时候top就看不到了,要留心. 最近项目在做 ...
- 解决WordPress无法上传媒体文件以及无法下载和安装主题与插件的问题
前言: 我的个人博客网站荒原之梦在安装成功WordPress之后本来是可以上传媒体文件,安装主题和插件的,但是后来不知道怎么回事就出了问题:不能上传媒体文件也不能安装主题和插件了.出现这个问题后我尝试 ...
- Get Docker CE for CentOS
To get started with Docker CE on CentOS, make sure you meet the prerequisites, then install Docker. ...
- app与手机其他软件交互测试
针对智能终端应用的服务等级划分方式及实时特性所提出的测试方法.交叉测试又叫事件或冲突测试,是指一个功能正在执行过程中,同时另外一个事件或操作对该过程进行干扰的测试.如:App在前/后台运行状态时与来电 ...