How to build the Robotics Library from source code on Windows
The Robotics Library is an open source C++ library for robot kinematics, motion planning and control.
The official website provides a Windows installer. But it's release only and has no debug information. To better debug into the library, we need to build it from the source code.
There's an official building instructions including its source code and all 3rd parties' download and building steps. But that description is for VS 2010 x64 release build, if building into VS 2008 win32 debug version, there're some extra work to do. This article describes all the required steps.
Step-by-step guide
The library can be built in many VS versions (2008, 2010, 2012, .. etc) and flavors (debug/release, win32/x64 bit). This article uses VS 2008 win32 debug version as an example. The process for other flavors (e.g VS 2012 x64 release) are similar.
Part 1: Preparation
- Create a temporary folder c:\temp, type command "subst S: c:\temp". This makes the code path in pdb files starts with a virtual logic drive "S:" so it's easier to debug the robotics library code in the future.
- Download the required third parties following the official building instructions, extract them to different folders in S:\3p. Here we only build the core library, so in a minimum we need Eigen, Boost, LibXml2, Coin3D and CGAL. If we want to build the demo programs then we need more 3ps like Qt, SOLID, .. etc.
- Download the source code of the robotics library, extract it to S:\source. Here is what my folder structure looks like after doing all these.
- Install CMake ≥ 2.8.11. Here I install CMake 3.0.
- Start "Visual Studio 2008 Command Prompt". type the following command to allow multi-core compilation support.
set VCBUILD_DEFAULT_OPTIONS=/M%NUMBER_OF_PROCESSORS%
set CL=/MP
Part 2: Build the 3rd parties
- Boost:
- change directory to the boost folder. execute the following command:
bootstrap.bat - execute the following command:
b2 toolset=msvc-9.0 install address-model=32 --build-type=complete --prefix="C:\Program Files (x86)\Boost" - add C:\Program Files (x86)\Boost\lib to the system's PATH variable.
- execute the following command:
set BOOST_ROOT=%ProgramFiles(x86)%\Boost
- change directory to the boost folder. execute the following command:
- Eigen:
change directory to the Eigen folder and execute the following command:mkdir Default
cd Default
cmake -G "Visual Studio 9 2008" -D CMAKE_INSTALL_PREFIX="C:\Program Files (x86)\eigen" ..
cmake --build . --config Debug --target INSTALL - LibXml2:
- change directory to the subdirectory "win32" and execute
cscript configure.js compiler=msvc debug=yes iconv=no prefix="C:\Program Files (x86)\libxml2" - edit the file "config.msvc" in that folder, find the line PREFIX=C:\Program Files (x86)\libxml2, change it to PREFIX="C:\Program Files (x86)\libxml2". (use double quote to enclose the path).
- execute the following command to build the library
nmake /f Makefile.msvc - change directory to the folder "bin.msvc", execute the following command to embed the manifest into the generated dll
mt.exe -manifest libxml2.dll.manifest -outputresource:libxml2.dll;2 - change director to "win32", execute teh following command to install the library to c:\Program Files (x86)
nmake /f Makefile.msvc install - add the C:\Program Files (x86)\libxml2\bin to the system's PATH variable
- change directory to the subdirectory "win32" and execute
- Coin3D:
- open the Visual Studio solution file build\msvc9\coin3.sln. Select the desired configuration (here are the dll-debug and lib-debug) and build. It'll report "coin3 docs" project built fails (possibly due to lack of doxygen), which is OK.
- create a folder "c:\Program Files (x86)\coin".
- create a temporary folder named like "c:\temp\install". Note this temp folder's full path should have no white space. We'll firstly install Coin3D to it and then copy all the files to "c:\Program Files (x86)\coin".
- change directory to the build\msvc9 folder, type the following command
set COINDIR=c:\temp\install
..\misc\install-sdk.bat dll debug msvc9 coin3
xcopy /s %COINDIR% "%programfiles(x86)%\coin"
- CGAL:
- change directory to the CGAL folder, open the CMakeLists.txt, remove the following line:
list (INSERT CGAL_ESSENTIAL_3RD_PARTY_LIBRARIES 0 GMP MPFR) - execute the following command
mkdir Default
cd Default
cmake -G "Visual Studio 9 2008" -D CMAKE_INSTALL_PREFIX="C:\Program Files (x86)\cgal" -D WITH_CGAL_ImageIO=OFF -D WITH_CGAL_Qt3=OFF -D WITH_CGAL_Qt4=OFF -D WITH_GMP=OFF -D WITH_MPFR=OFF ..
cmake --build . --config Debug --target INSTALL
- change directory to the CGAL folder, open the CMakeLists.txt, remove the following line:
Part 3: Build the Robotics Library
The building instructions builds the library in command line, while I meet some problem when using it. Here are the steps of how to build it with CMake-gui and VS IDE.
- change directory to the robotics library folder, open the CMakeLists.txt. Change the following options to "FALSE" because we don't want to build the demos and tests.
option(BUILD_DEMOS "Build demos" FALSE)
option(BUILD_EXTRAS "Build extras" FALSE)
option(BUILD_RL_MATH "Build RL::MATH" TRUE)
option(BUILD_RL_UTIL "Build RL::UTIL" TRUE)
option(BUILD_RL_XML "Build RL::XML" TRUE)
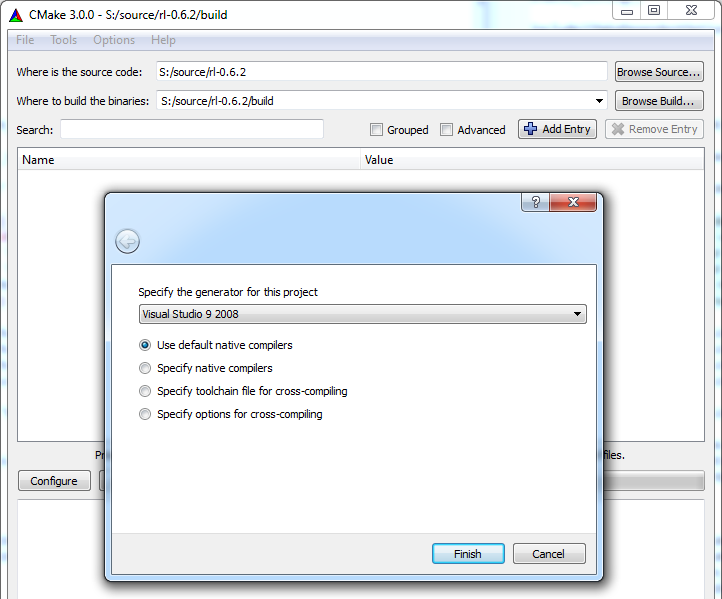
option(BUILD_TESTS "Build tests" FALSE) - open CMake-gui, specify the source directory as "S:\source\rl-0.6.2" and build directory as "S:\source\rl-0.6.2\build". click "Configure", select "Visual Studio 9 2008" as the generator, keeping the default option of "Use default native compilers'.
- It'll prompt "LIBXML2_INCLUDE_DIRS" can't be found, specify it as "C:\Program Files (x86)\libxml2\include\libxml2". Also, add an entry "BOOST_ROOT", specifying its value as "C:\Program Files (x86)\Boost".

- Click "Configure", there'll be no error any more. Click "Configure" again so there's no red item. Click "Generate" to generate the solution files.
- Open the "build\rl.sln" in VS2008. Find these 8 projects: rlhal, rlkin, rlmath, rlmdl, rlplan, rlsg, rlutil, rlxml. Change their default pdb files name to "$(ProjectName)d.pdb" as following:

- Build the solution.
- Copy the pdb files to the installed folderxcopy /s lib\debug\*.pdb "c:\Program Files (x86)\rl\lib"
- Change directory to the "build" folder. Execute the following commands to copy the header files, library files and pdb files to "c:\Program Files (x86)\rl"
cmake --build . --config Debug --target INSTALLxcopy /s lib\debug\*.pdb "c:\Program Files (x86)\rl\lib"
- If building in release, replace the "debug", "Debug" command options to "release", "Release".
- If building in x64, start the "Visual Studio x64 Win64 Command Prompt". And replace the installation folder from "c:\Program Files (x86)" to "c:\Program Files"
- If building in other VS versions, replace the tool set and visual studio version string. E.g., for VS 2012 x64 version, replace "msvc-9.0" with "msvc-11.0", replace "Visual Studio 9 2008" with "Visual Studio 11 Win64". A complete list of CMake 3.0 VS generator string can be found here.
- See the official building instructions for more examples on 64 bit release build instructions.
Part 4: Package the library
The built Robotics Library files and its 3rd parties are in "c:\Program Files (x86)", they don't have to be there. And we can copy all their lib files to one place so the application referencing will be easier.
Copy the following content to a batch file and execute it to put all the files (header, lib, dll) into a similar folder structure as the Robotics Library's official Windows installation.
====================================================================
set RL_ROOT=%programfiles(x86)%
REM copy the header files
xcopy /s %RL_ROOT%\Boost\include\boost-1_55 %RL_ROOT%\rl\include
xcopy /s %RL_ROOT%\cgal\include %RL_ROOT%\rl\include
mkdir %RL_ROOT%\rl\include\coin
xcopy /s %RL_ROOT%\coin\include %RL_ROOT%\rl\include\coin
mkdir %RL_ROOT%\rl\include\Eigen
xcopy /s %RL_ROOT%\eigen\include\eigen3\Eigen %RL_ROOT%\rl\include\Eigen
xcopy /s %RL_ROOT%\libxml2\include\libxml2 %RL_ROOT%\rl\include
REM copy the lib files
xcopy /s %RL_ROOT%\Boost\lib %RL_ROOT%\rl\lib
xcopy /s %RL_ROOT%\cgal\lib %RL_ROOT%\rl\lib
xcopy /s %RL_ROOT%\coin\lib %RL_ROOT%\rl\lib
xcopy /s %RL_ROOT%\libxml2\lib %RL_ROOT%\rl\lib
REM copy the dll files
mkdir %RL_ROOT%\rl\bin
xcopy /s %RL_ROOT%\cgal\bin %RL_ROOT%\rl\bin
xcopy /s %RL_ROOT%\coin\bin %RL_ROOT%\rl\bin
xcopy /s %RL_ROOT%\libxml2\bin %RL_ROOT%\rl\bin
REM remove the old files
rmdir /s /q %RL_ROOT%\Boost
rmdir /s /q %RL_ROOT%\cgal
rmdir /s /q %RL_ROOT%\coin
rmdir /s /q %RL_ROOT%\eigen
rmdir /s /q %RL_ROOT%\libxml2
Part 5: Test the library
- Create a win32 console application, copy below content to the main .cpp file.
#include <iostream>
#include <rl/math/Transform.h>
#include <rl/math/Unit.h>
#include <rl/mdl/Kinematic.h>
#include <rl/mdl/Model.h>
#include <rl/mdl/XmlFactory.h> int
main(int argc, char** argv)
{
rl::mdl::XmlFactory factory;
rl::mdl::Kinematic * kinematics = dynamic_cast<rl::mdl::Kinematic *>(factory.create("C:\\Program Files (x86)\\rl-0.6.2\\share\\rl\\examples\\rlmdl\\unimation-puma560.xml"));
rl::math::Vector q(6);
q << 10, 10, -20, 30, 50, -10;
q *= rl::math::DEG2RAD;
kinematics->setPosition(q);
kinematics->forwardPosition();
rl::math::Transform t = kinematics->getOperationalPosition(0);
rl::math::Vector3 position = t.translation();
rl::math::Vector3 orientation = t.rotation().eulerAngles(2, 1, 0).reverse();
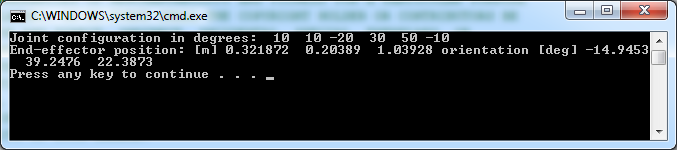
std::cout << "Joint configuration in degrees: " << q.transpose() * rl::math::RAD2DEG << std::endl;
std::cout << "End-effector position: [m] " << position.transpose() << " orientation [deg] " << orientation.transpose() * rl::math::RAD2DEG << std::endl;
return 0;
} - Set header file search path to "%RL_ROOT%\rl\include"
- Add "rlmdld.lib rlxmld.lib rlmathd.lib libxml2.lib" as library dependencies. Set library file search path to "%RL_ROOT%\rl\lib"
- Add "EIGEN_DONT_ALIGN" to "C++"–> "Preprocessor" --> "Preprocessor Definitions." (this is to prevent the Eigen issue on 32 bit platforms)
- Build the application, copy libxml2.dll to the exe folder. Run the application, you'll get the following result:
Reference
http://www.roboticslibrary.org/tutorials/build-windows
How to build the Robotics Library from source code on Windows的更多相关文章
- How to Build MySQL from Source Code on Windows & compile MySQL on win7+vs2010
Not counting obtaining the source code, and once you have the prerequisites satisfied, [Windows] use ...
- Visual Studio 2012,创建工程Build Driver,基于纯Source Code.
拿到一堆纯代码,怎么去Create Project,设置Include路径,lib路径,要不要Pre-compile技术,配置Project之间的依赖关系. SourcesConverter Bas ...
- How to build windows azure PowerShell Source Code
Download any version source code of Windows Azure Powershell from https://github.com/Azure/azure-sdk ...
- How to compile and install Linux Kernel 5.1.2 from source code
How to compile and install Linux Kernel 5.1.2 from source code Compiling a custom kernel has its adv ...
- nginx 编译某个模板的问题./configure: error: SSL modules require the OpenSSL library. You can either do not enable the modules, or install the OpenSSL library into the system, or build the OpenSSL library stati
root@hett-PowerEdge-T30:/usr/local/src/nginx-1.9.8# ./configure --prefix=/usr/local/nginx --add-mod ...
- Attach source code to a Netbeans Library Wrapper Module
http://rubenlaguna.com/wp/2008/02/22/attach-source-code-to-a-netbeans-library-wrapper-module/ Attach ...
- Tips for newbie to read source code
This post is first posted on my WeChat public account: GeekArtT Reading source code is always one bi ...
- 3 Ways of JDK Source Code Attachment in Eclipse---reference
You wanna look at a JVM class while you are coding and you cannot. Here is the solution. First of al ...
- How to compile and install Snort from source code on Ubuntu
http://www.tuicool.com/articles/v6j2Ab Snort is by far the most popular open-source network intrusio ...
随机推荐
- SpringBoot读取配置文件
项目结构 pom.xml <project xmlns="http://maven.apache.org/POM/4.0.0" xmlns:xsi="http:// ...
- jq倒计时(代码)
<!DOCTYPE html><html lang="en"><head> <meta charset="UTF-8" ...
- Android IOS WebRTC 音视频开发总结(七七)-- WebRTC的架构和协议栈
本文主要介绍WebRTC的架构和协议栈(我们翻译和整理的,译者:litie),最早发表在[编风网] 支持原创,转载必须注明出处,欢迎关注我的微信公众号blacker(微信ID:blackerteam ...
- MVC中的@符号
1: @if (@Model.DepositList != null) { } 2: @if (@Model.DepositList != null) { foreach (Deposit_ViewM ...
- 这几天帮一个朋友解决了一点小问题(RF的有些小问题及解决过程)
最近涉猎自动化太少了,以至于都不经常更新了.最近一个朋友在做移动端自动化的时候遇到了一些小问题来找我解决.本人也不是很精通,只是接触的时间长了一点了.下面就是一些问题和解决过程: 1.她刚过来的时候, ...
- declaration expected but identifier 'firedac' found
老是出现这种错误,原来是//注解时出来标点错误!
- eclipse 查看变量或方法在什么地方被调用的快捷键
选中方法名,点鼠标右键,菜单里有个”打开调用层次结构 ( Open Call Hierarchy )“,选中或者按下快捷键Ctrl+Alt+H,就在下面栏目里能看到调用的树形结构了. 或者: 1.双击 ...
- CheckBox设置Enabled为False后,无法修改ForeColor
设置CheckBox的AutoCheck为False,Enabled为True,即可解决.
- android 下载文件,file的读写应用
先看代码: public class MainActivity extends AppCompatActivity { String TAG = MainActivity.class.getCanon ...
- css3新属性
CSS calc()函数来制作响应式网格: calc是英文单词calculate(计算)的缩写,是css3的一个新增的功能,你可以使用calc()给元素的border.margin.pading.fo ...