基于STM32的三轴数字罗盘HMC5883L模块的测试
最近买了个数字罗盘模块,调通后发现很不错,非常灵敏,测试的时候精度在1°以内。连续测量模式下,最快测量、输出速率可达75hz,模块每次测量完毕并将数据更新至寄存器后,其DRDY引脚便产生一个低电平脉冲(可以配置一个外部中断捕获DRDY引脚的下降沿,并在中断服务程序中读取数据),在STM32中可以设置一个下降沿触发的外部中断,并在中断服务程序中调用角度数据读取函数。以下为操作该模块的主要步骤。
一、IIC协议相关操作(单片机作为主机控制时钟线)
宏定义:
//这里用到了STM32的位带区操作,方便实现对一个位的操作
//PB13配置为OD输出,同时外部给上拉电阻,这样既可输出信号给从机,也能
//在PB13为漏极开路状态时接收从机的信号(STM32的IO配置为输出模式时,
//IO口的电平也会不断地被捕获到输入寄存器中)
//PB14配置为推挽输出,PB15配置为浮空输入
#define R_SDA IPB13 // PB13输入寄存器
#define W_SDA OPB13 // PB13输出寄存器
#define W_SCL OPB14 // PB14输出寄存器
#define R_DRDY IPB15 // PB15输入寄存器
#define Xmsb 0 //X轴数字量的高8位
#define Xlsb 1 //X轴数字量的低8位
#define Zmsb 2 //Z轴数字量的高8位
#define Zlsb 3 //Z轴数字量的低8位
#define Ymsb 4 //Y轴数字量的高8位
#define Ylsb 5 //Y轴数字量的低8位
附位带宏定义:
#define GPIOB_ODR_Addr (GPIOB_BASE+12) //0x40010C0C
#define GPIOB_IDR_Addr (GPIOB_BASE+8) //0x40010C08 #define BITBAND_Addr(Addr,num) ((volatile unsigned long *)(0x42000000+32*(Addr-0x40000000)+4*num)) #define IPB13 *BITBAND_Addr(GPIOB_IDR_Addr,13)
#define OPB13 *BITBAND_Addr(GPIOB_ODR_Addr,13)
#define OPB14 *BITBAND_Addr(GPIOB_ODR_Addr,14)
#define IPB15 *BITBAND_Addr(GPIOB_IDR_Addr,15)
启动IIC传输:
void _iic_Start()
{
W_SCL=;
W_SDA=;
_delay();
W_SDA=; //SCL高时,拉低SDA,表示开始IIC传输,占用总线
_delay();
W_SCL=; //控制SCL
_delay();
}
停止IIC传输:
void _iic_Stop()
{
W_SCL=; //释放SCL(由于没有其他主器件,SCL无需开漏)
W_SDA=;
_delay();
W_SDA=; //SCL为高时,拉高SDA表示结束ICC传输,释放总线
}
发送一个字节:
uint8_t _iic_SendByte(uint8_t dat)
{
uint8_t i;
for(i=;i<;i++)
{
_delay();
W_SDA=dat>>; //SCL拉高之前写SDA
dat=dat<<;
_delay();
W_SCL=; //拉高SCL,从器件开始读取SDA
_delay();
W_SCL=; //重新拉低SCL
}
W_SDA=; //释放SDA
W_SCL=; //拉高SCL,读取从器件应答信号
// 等待应答
i=;
while(i&&R_SDA) {i--;_delay();}
if(i==) //无应答
{
W_SCL=; //重新拉低SCL
return ;
}
else { //有应答
_delay();
W_SCL=; //重新拉低SCL
return ;
}
}
接收一个字节:
uint8_t _iic_ReadByte(uint8_t Ack)
{
uint8_t temp,i;
W_SDA=; //释放SDA
_delay();
for(i=;i<;i++)
{
_delay();
W_SCL=; //拉高SCL开始读取SDA
temp=temp<<;
temp|=R_SDA; //SCL拉高之后读取SDA
W_SCL=; //拉低SCL,从器件开始放置数据
}
//发送应答信号
if(Ack)W_SDA=; //拉低SDA表示应答
W_SCL=; //拉高SCL,从器件接收应答信号
_delay();
W_SCL=; //重新拉低SCL
W_SDA=; //释放SDA
return temp;
}
二、配置HMC5883L模块
void HMC5883L_Init()
{
_iic_Start();
_iic_SendByte(0x3c); //写操作
_iic_SendByte(0x00); //指针指向00,配置寄存器A
_iic_SendByte(0x78); //数据测量、输出速率75hz
_iic_Start(); //指针定位到02,模式寄存器
_iic_SendByte(0x3c);
_iic_SendByte(0x02);
_iic_SendByte(0x00); //连续测量模式
_iic_Stop();
}
三、读取角度数据
接收三轴数据,处理X,Y轴的数据并计算角度:
int16_t HMC5883L_ReadAngle()
{
static uint8_t i;
static uint8_t XYZ_Data[]; //用来存储三个轴输出的数字量 _iic_Start();
_iic_SendByte(0x3c); // 发送HMC5883L的器件地址0x3c,写操作
_iic_SendByte(0x03); //指针指向03,X msb寄存器
_iic_Start();
_iic_SendByte(0x3d); //改为读操作 //依次读取三个轴的数字量
for(i=;i<;i++) //前5次读取发送应答信号
{
XYZ_Data[i]=_iic_ReadByte();
}
XYZ_Data[] =_iic_ReadByte(); //不应答
_iic_Stop();
return atan2( (double)((int16_t)((XYZ_Data[Ymsb]<<)+XYZ_Data[Ylsb]) ),(double)((int16_t)((XYZ_Data[Xmsb]<<)+XYZ_Data[Xlsb])))*(/3.14159265)+; //计算角度,需要包含math.h头文件
}
配置好IO口,调用HMC5883L_Init()后,便可调用HMC5883L_ReadAngle()读取角度值,0~360°。
以下为测试时的截图:
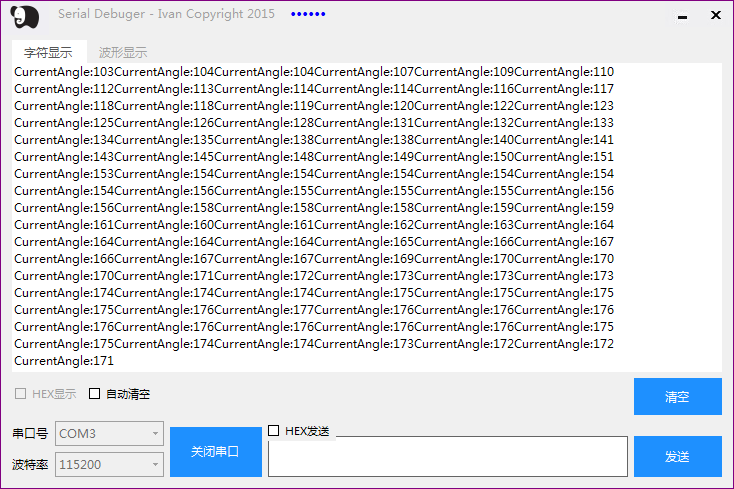
测试时,模块比较灵敏且精确,稍微旋转模块便有精确的变化。由于该模块是基于对地磁场的测量,此模块容易受到其他磁场的干扰,比如将该模块靠近直流电机时,
便会因为电机内的磁场而降低精度甚至失灵(之前做智能小车时就遇到这个问题,要将电机内的磁场屏蔽起来才行)。
(完)
基于STM32的三轴数字罗盘HMC5883L模块的测试的更多相关文章
- 张高兴的 Windows 10 IoT 开发笔记:三轴数字罗盘 HMC5883L
注意,数据不包含校验,准确的来说我不知道怎么校验,但方向看起来差不多是对的... GitHub:https://github.com/ZhangGaoxing/windows-iot-demo/tre ...
- 玩转X-CTR100 l STM32F4 l HMC5983/HMC5883L三轴磁力计传感器
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] 本文介绍X-CTR100控制器 扩展HMC ...
- Arduino I2C + 三轴加速度计ADXL345
ADXL345是ADI公司生产的三轴数字加速度计芯片,与ST的LIS3DH功能接近.主要特性有: 工作电压:2.0 ~ 3.6V 功耗:待机功耗0.1μA:工作时与数据输出频率(ODR)有关,如ODR ...
- 【传感器】BMA253 数字,三轴加速度传感器
参考文档:BMA253E DataSheet 参考文档链接 密码:9new BMA253 数字,三轴加速度传感器 关键特性: 关键特性 封装方式 LGA封装(12pins),长*宽(2mm*2mm ...
- 基于STM32的学习型通用红外遥控设备的设计实现(三)
CPU: STM32 调试平台: STM32F103ZET和STM32F103VBT 软件平台: Keil uVision4 电路设计: Altium Designer v6.9 http://blo ...
- Keil MDK STM32系列(三) 基于标准外设库SPL的STM32F407开发
Keil MDK STM32系列 Keil MDK STM32系列(一) 基于标准外设库SPL的STM32F103开发 Keil MDK STM32系列(二) 基于标准外设库SPL的STM32F401 ...
- 我的嵌入式Qt开发第一课——基于BBB和hmc5843三轴电子罗盘
几次想照着课本系统地学习Qt,但我发现还是有详细问题驱动时学习比較快. 于是我给自己设定了这个任务: 读取HMC5843的三轴磁场强度值,计算出角度,并把角度用直观形式显示在图形界面上. 这里面涉及到 ...
- 基于STM32的uCGUI移植和优化
基于STM32的uCGUI移植和优化 首先在开始这个说明之前,要简要说明下具体的环境: 编译工具:MDK4.20 开发板:安富莱v2版开发板 调试器:JLink v8盗版 移植篇 相信大家有移植经验 ...
- 【雕爷学编程】Arduino动手做(48)---三轴ADXL345模块
37款传感器与模块的提法,在网络上广泛流传,其实Arduino能够兼容的传感器模块肯定是不止37种的.鉴于本人手头积累了一些传感器和模块,依照实践(动手试试)出真知的理念,以学习和交流为目的,这里准备 ...
随机推荐
- C# unicode GBK UTF-8和汉字互转
界面: 源码: using System; using System.Collections.Generic; using System.ComponentModel; using System.Da ...
- sqlalchemy——多表操作
一对多:一对一 # one -- many class Students(Base): __tablename__ = "students" sid = Column(Intege ...
- Java中的 && 与&
Java中&&和&都是表示与的逻辑运算符,都表示逻辑运输符and,当两边的表达式都为true的时候,整个运算结果才为true,否则为false. &&的短路功能 ...
- redis于spring整合之RedisTemplate
原文地址: http://www.jianshu.com/p/7bf5dc61ca06
- Oracle数据库体系结构(2)数据库实例
Oracle实例的概念: 实例(Instance):就是数据库管理系统,处于用户与物理数据库之间的一个中间层软件,由一系列内存结构和后台进程组成. 用户操作数据库的过程实质上与数据库实例建立连接,然后 ...
- 【转】.net中快捷键的使用
当前行行首:Home 当前行行尾:End 当前文档首行:ctrl+Home 当前文档尾行:ctrl+End 选中当前行: ① 按Home(定位到行首)然后按Shift+Dnd(行尾) {从行首连选 ...
- CKeditor插件开发流程(一)
1.放在多文件中 第一步:config.js中 config.extraPlugins = '插件名称';//注册插件,extraPlugins只允许出现一次,你如果之前有新增别的插件,那么用逗号分隔 ...
- Html 表单表格 form table
<!DOCTYPE html PUBLIC "-//W3C//DTD XHTML 1.0 Transitional//EN" "http://www.w3.org/ ...
- Oracle结构控制语句
--if语句 if [判断条件] then --条件满足执行的语句 end if; -- if ...else... if [判断条件] then ----条件满足执行的语句 else --不满足条件 ...
- node.js抓取网上图片保存到本地
用到两个模块,http和fs var http = require("http");var fs = require("fs"); var server = h ...