tf一些理解(根据资料)
首先看了开源操作机器人系统-ros这本书(张建伟)第五章slam导航 5.1使用tf配置机器人
还有ros navigation 教程
http://wiki.ros.org/navigation/Tutorials/RobotSetup/TF
这里需要区分两种变换
1、坐标系变换
2、坐标变换
坐标系变换就是指一个坐标系怎么变换成另外一个坐标系
坐标变换就是指一个坐标系下点怎么变换成另外一个坐标系下坐标
这两个略微有所不同
tf tree维护的是坐标系变换

base_link到base_laser坐标系变换就是[0.1,0,0.2]
而base_laser到base_link就是[-0.1,0,-0.2]
坐标变换则是转动坐标系在固定坐标系下运动描述
具体可以看这篇博客
http://blog.exbot.net/archives/1686
博客主要知识点:
这里有个巧合,当然也不是巧合,那就是从child到parent的坐标变换等于从parent到child的frame transform,等于child在parent frame的姿态描述。这里牵扯到了线性代数里的基变换、线性变换、过渡矩阵的概念。
接下来是实际操作部分
下面这段代码实现了从user_set topic读取数据,在call_back中进行tf 广播,在主程序里进行look_up
#include <ros/ros.h>
#include <tf/transform_broadcaster.h>
#include <nav_msgs/Odometry.h>
#include <geometry_msgs/Pose2D.h>
#include <tf/transform_listener.h>
#include <stdio.h>
class test
{
private:
ros::NodeHandle nh_;
ros::Subscriber sub_;
tf::TransformBroadcaster br_;
bool data_ready; public:
test(ros::NodeHandle& nh)
{
nh_=nh;
sub_ = nh_.subscribe("/user_set", 10, &test::call_back,this);
data_ready = false;
}
void call_back(const geometry_msgs::Pose2DPtr& msgs)
{
ROS_INFO("recive");
tf::Transform dest_transform;
dest_transform.setOrigin(tf::Vector3(msgs->x,msgs->y,0));
tf::Quaternion q;
q.setRPY(0, 0, msgs->theta);
dest_transform.setRotation(q);
br_.sendTransform(tf::StampedTransform(dest_transform, ros::Time::now(),"world","user_set_frame"));
data_ready = true;
} bool is_data_ready()
{
if(data_ready)
return true;
else
return false;
} };
int main(int argc, char** argv){
ros::init(argc, argv, "tf_broadcaster"); ros::NodeHandle node;
test Otest(node);
tf::TransformListener listener; tf::StampedTransform transform; while(ros::ok())
{
if(!Otest.is_data_ready())
{
ros::spinOnce(); continue;
}
ROS_INFO("lookup_transfoem;");
try
{
//查找的是world到user_set_frame“坐标变换”具体可以看见看教程
//http://wiki.ros.org/tf/Tutorials/Writing%20a%20tf%20listener%20%28C%2B%2B%29
//rosrun tf tf_echo求的是坐标系变换
listener.waitForTransform("world","user_set_frame",ros::Time::now(), ros::Duration(1.0));
listener.lookupTransform("world","user_set_frame",ros::Time(0),transform);
}
catch (tf::TransformException ex)
{
ROS_ERROR("%s",ex.what());
break;
}
tf::Vector3 vectortf = transform.getOrigin();
ROS_INFO("transform.x:%f,transform.y:%f,transform.z:%f",vectortf.x(),vectortf.y(),vectortf.z());
ros::spinOnce(); }
return 0;
}
Here, the real work is done, we query the listener for a specific transformation. Let's take a look at the four arguments:
- We want the transform from this frame ...
- ... to this frame.
The time at which we want to transform. Providing ros::Time(0) will just get us the latest available transform.
- The object in which we store the resulting transform.
知道tf变换后怎么进行坐标变换呢?
开源操作机器人系统-ros这本书(张建伟)第五章slam导航 5.1使用tf配置机器人

tf一些理解(根据资料)的更多相关文章
- 对word2vec的理解及资料整理
对word2vec的理解及资料整理 无他,在网上看到好多对word2vec的介绍,当然也有写的比较认真的,但是自己学习过程中还是看了好多才明白,这里按照自己整理梳理一下资料,形成提纲以便学习. 介绍较 ...
- CSS3 float深入理解浮动资料整理
CSS浮动(float,clear)通俗讲解 CSS 浮动 CSS float浮动的深入研究.详解及拓展(一) CSS float浮动的深入研究.详解及拓展(二) 1.浮动实现图文环绕(理解难点) 浮 ...
- c语言宏定义#define的理解与资料整理
1. 利用define来定义 数值宏常量 #define 宏定义是个演技非常高超的替身演员,但也会经常耍大牌的,所以我们用它要慎之又慎.它可以出现在代码的任何地方,从本行宏定义开始,以后的代码就就都认 ...
- tf.segment_sum和tf.unsorted_segment_sum理解实例
本文来自 guotong1988 的CSDN 博客 ,全文地址请点击:https://blog.csdn.net/guotong1988/article/details/77622790 import ...
- [转]c语言宏定义#define的理解与资料整理
原文地址:http://www.cnblogs.com/haore147/p/3646934.html 1. 利用define来定义 数值宏常量 #define 宏定义是个演技非常高超的替身演员,但也 ...
- 深入理解JavaScript——闭包
跟很多新手一样我也是初入前端,对闭包的理解花费的时间和精力相当的多.效果也还行,今天我就来根据自己的理解细致的讲一讲闭包,由于是初入学习的时候不免有一些弯路和困惑,我想信这也是很多跟我一样的人会同样遇 ...
- ROS探索总结(十八)——重读tf
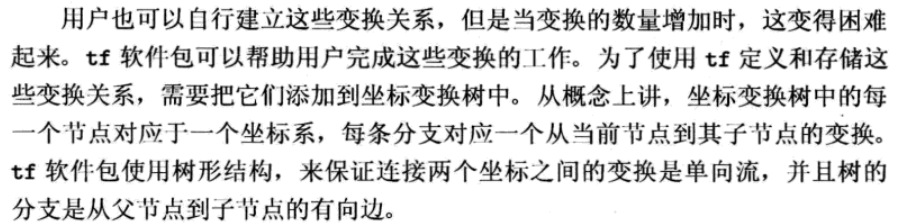
在之前的博客中,有讲解tf的相关内容,本篇博客重新整理了tf的介绍和学习内容,对tf的认识会更加系统. 1 tf简介 1.1 什么是tf tf是一个让用户随时间跟踪多个参考系的功能包,它使用一种树型数 ...
- Hadoop介绍篇
Hadoop详解 1.前言 对于初次接触Hadoop的小伙伴来说,Hadoop是一个很陌生的东西,尤其是Hadoop与大数据之间的关联,写这篇文章之前,我也有许多关于Hadoop与大数据的疑惑,接下来 ...
- 从DOM操作看Vue&React的前端组件化,顺带补齐React的demo
前言 接上文:谈谈我对前端组件化中“组件”的理解,顺带写个Vue与React的demo 上次写完博客后,有朋友反应第一内容有点深,看着迷迷糊糊:第二是感觉没什么使用场景,太过业务化,还不如直接写Vue ...
随机推荐
- Java 虚拟机结构分析
本博文主要介绍了JVM(Java Virtual Machine)的组成部分以及它们内部的工作机制和原理.需要注意的是,虽然平时我们用的大多是Sun(现已被Oracle收购)JDK提供的JVM,但是J ...
- Android学习记录(3)—Android中ContentProvider的基本原理学习总结
一.ContentProvider简介 当应用继承ContentProvider类,并重写该类用于提供数据和存储数据的方法,就可以向其他应用共享其数据.虽然使用其他方法也可以对外共享数据 ...
- 剑指Offer - 九度1355 - 扑克牌顺子
剑指Offer - 九度1355 - 扑克牌顺子2014-01-30 23:19 题目描述: LL今天心情特别好,因为他去买了一副扑克牌,发现里面居然有2个大王,2个小王(一副牌原本是54张^_^). ...
- 为什么要搞vim
一. 先得想清楚折腾vim受的这顿折磨值不值.值.零碎记录几点. 迫使我使用vim的原因如下: (1)之前实习的公司的开发机上只有vim,以后工作的公司也只有vim,同部门的同事大都用vim:如果不用 ...
- iOS笔记059 - 网络总结
网络 基本概念 客户端:client 服务器:server 请求:request 响应:response 过程 客户端 -> 发送请求 -> 服务器(连接数据库) 服务器 -> 发送 ...
- iphone 8 plus 红色特别版,突然自动关机无法启动
今天早上我的iphone 8p 突然自己在床上闪动开机图标,闪了半个多小时它就光荣的自动关机了,我尝试了长按开机键,长按home+开机键15秒,通通木有用,它就是没!反!应! 于是找了售后,学到了正确 ...
- java初学1
1.Java主要技术和分支以及应用领域 (1)Java SE Java Platform,Standard Edition,Java SE 以前称为J2SE.它允许开发和部署在桌面.服务器.嵌入式环境 ...
- Python全栈工程师(for、列表)
ParisGabriel Python 入门基础 for:用来遍历可迭代对象的数据元素可迭代对象是指以此获取数据元素的对象可迭代对象包括:字符串 str 列表 list元组 t ...
- 孤荷凌寒自学python第三十九天python 的线程锁Lock
孤荷凌寒自学python第三十九天python的线程锁Lock (完整学习过程屏幕记录视频地址在文末,手写笔记在文末) 当多个线程同时操作一个文件等需要同时操作某一对象的情况发生时,很有可能发生冲突, ...
- HDU 3577 Fast Arrangement ( 线段树 成段更新 区间最值 区间最大覆盖次数 )
线段树成段更新+区间最值. 注意某人的乘车区间是[a, b-1],因为他在b站就下车了. #include <cstdio> #include <cstring> #inclu ...