二叉树(3)AVL 树
封装基于 BinaryTreeOperations 的 AVL 树(一种自平衡的二叉查找树)。
除了提供 BinaryTreeOperations 中的部分基础接口外,增加按键的插入 和 按键或节点指针的删除操作。
在阅读本文前,您应该先了解二叉树中的旋转是怎么回事(相关文章很多且简单,笔者不再赘述)。
一、节点定义:
struct Node
{
_Ty key;
;
Node* left = nullptr;
Node* right = nullptr;
Node* parent = nullptr;
Node(const _Ty& _key) :key(_key) {}
};
二、AVL 树的规则:
任何节点的两个子树最大高度差为 1。
根据 AVL 树的规则,可见在插入和删除节点后,可能会打破 AVL 树的平衡,因此在插入和删除时应进行调整,使得 AVL 树能够自平衡。
因此在节点定义中加入平衡因子 bf 用于记录节点的平衡状态。
注:bf == 0 时,节点左右子树等高;bf == -1 时,左子树高一层;bf == 1 时,右子树高一层。bf 绝对值大于 1 时应该进行调整。
调整时需要进行旋转,旋转规则(令失衡节点为 cur):
① 左左_右旋:cur 左子树比右子树高两层(bf == -2)且 cur 的左子树 bf == -1 时:以 cur 右旋。
② 右右_左旋:cur 右子树比左子树高两层(bf == 2)且 cur 的左子树 bf == 1时:以 cur 左旋。
③ 左右_左右旋:cur 左子树比右子树高两层(bf == -2)且 cur 的左子树 bf == 1时:先以 cur 的左孩子左旋,再以 cur 右旋。
④ 右左_右左旋:cur 右子树比左子树高两层(bf == 2)且 cur 的左子树 bf == -1时:先以 cur 的右孩子右旋,再以 cur 左旋。
注意 bf 值的含义,左子树高还是右子树高或者等高。
单旋转方法已经在 BinaryTreeOperations.h 中给出。
三、现对旋转(单旋转和双旋转)后相关节点的平衡因子 bf 的变化进行说明(很多教程并未明确提出 导致读者不能明确 bf 的变化)。
一、以左旋为例(单旋),右旋与左旋类似。
二、以 右左旋为例(双旋),左右旋与右左旋类似。
先看 一,与下图结合看(假设应该调整的节点是 X):
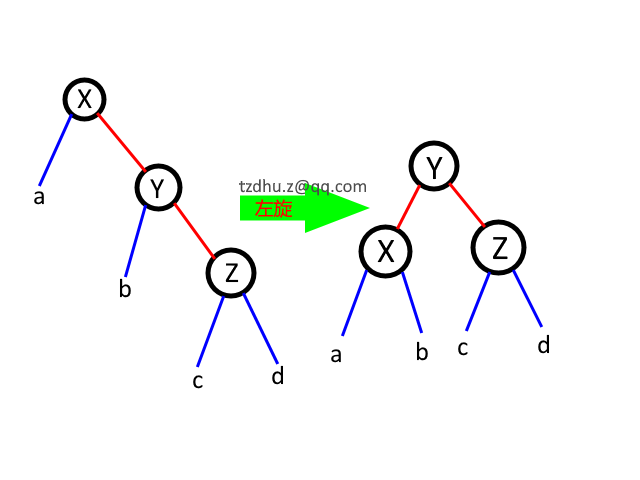
发现:
① Z 节点孩子未发生变动,因此 Z 节点的平衡因子不需要改变。
② 若 a 为空,则 b,c,d 必定为空(看 AVL 树的规则),因此,X,Y 的平衡因子均应该置零。(此时插入的节点为 Z)。
③ 若 a 不为空,则 b 一定不为空,c,d 一定其一为空,另一个不为空。(此时插入的节点为 c,d 之一,另一个为空)。可见,X,Y 节点任然平衡,平衡因子应置零。
再看 二,与下图结合看(假设应该调整的节点是 X):

发现:
① Z 一定平衡(见下分析),其平衡因子 bf 应置零。
② 若 a 为空,则 b,c,d 必定为空(看 AVL 树的规则),X,Y,Z 的平衡因子均应该置零。(此时插入的节点为 Z)。
③ 若 a 不为空,则 b 一定不为空,c,d 一定其一为空,另一个不为空。(此时插入的节点为 c,d 之一,另一个为空)。
1)若插入为 c,则 X 平衡,其 bf 应置零,Y 右子树高,其 bf 应置 1。
2)若插入为 d,则 X 左子树高,其 bf 应置 -1,Y 平衡,其 bf 应置零。
至此,单旋双旋 旋转后旋转因子的变化说明清楚(调用 BinaryTreeOperations.h 中的旋转方法后应修改相关节点的 bf)。
四、插入操作:
可知,新插入的节点(令为 cur)必定是空位置,令插入后其父亲节点为 par(考虑成功插入的情况,只有成功插入才可能打破平衡)。
插入后的自平衡很简单,首先要知道,插入后 par 一定不会失去平衡(不用解释吧)。
插入后分为两种情况讨论即可(令 par 的父亲节点为 gpa,也就是新加节点的祖父节点):
一、par 有两个孩子。
二、par 只有一个孩子。
先看 一:par 有两个孩子,说明 cur 的插入没有给 par 或者 par 的祖先带来高度变化(没有新加层),此时直接返回即可。
再看二:par 只有一个孩子,说明 cur 的插入带来了高度变化,可能需要调整,此时应该怎能做呢?
① 先根据 par 和 gpa 的关系(即 par 是 gpa 的左孩子还是右孩子)来更新 gpa 的 bf。(默认插入时已经对 par 的平衡因子进行更新)
注:如何更新 par 和 gpa 的平衡因子不用说吧?(看是左孩子还是右孩子,右孩子 则 bf 自增,左孩子 则 bf 自减)。
② 根据 gpa 的平衡因子判断是否需要调整(即是否需要旋转)。
1)gpa 不需要旋转,则 par,gpa 分别指向各自父节点,继续 ① 操作,直到 2)或者 gpa 为空。
2)gpa 要旋转,则根据 par,gpa 的 bf 判断旋转方法进行调整,然后返回即可(请看上文 旋转规则)。
注:2)之后需要继续向上操作吗?(当然不需要!gpa 旋转后,对 gpa 的祖先而言没有高度的增加和减小)。
注意插入空树的情况。
至此,插入操作讲解完成,后序进行删除操作讲解,这会比插入操作稍加困难。
五、删除操作:
删除操作会比插入操作稍加复杂,下面先分析其原因所在(这里令 待删除节点为 cur,其父节点为 par)。
注:红黑树亦是如此,RBTree 的 删除比 AVLTree 的删除更加复杂,所以对于 AVLTree 的删除不用慌。
① 插入时, 新插入节点的 父亲节点 在插入前 一定:没有孩子 或 有一个孩子(该孩子一定没有孩子),而删除时 cur 可能没有孩子或有一个或两个孩子。
② 删除时有无孩子都需要判断是否 cur 是根节点。
③ 应该如何删除 cur 且如何判断是否调整。
针对上述问题,我们可将其简化。
① 删除节点是否为根节点的问题比较简单,只需做一下判断即可,后文不讨论该情况。
② 删除节点有两个孩子时:如二叉查找树一般,用后继节点代替并调用函数自身去删除后继结点(也可用前驱节点代替)。
③ 删除节点没有孩子。
④ 删除节点只有一个孩子。
注:② 中的后继结点(或前驱节点)一定属于 ③ 或 ④ 情况。
因此,将重点讨论 ③ ④ 情况。
即:
一、删除节点没有孩子(是叶子节点)。
二、删除节点只有一个孩子。
注:令 cur 为待删除节点,par 为其父亲节点,gpa 为 par 的父亲节点。
先看 一(cur 是叶子节点):
① 若 cur 不存在兄弟节点,则删除 cur 会造成高度变化,gpa 是第一个可能失衡的节点(不用图也能想清楚吧)。
② 若 cur 存在兄弟节点,则 par 可能失衡(比如 par 右子树深度为2,左子树深度为一,删除左子树会失衡)。
OK,既然知道第一个可能失去平衡的节点,那只需要检测并调整就好了。
注意:什么情况需要继续向根节点回溯呢?即:通过旋转操作后 需要继续向上 还是 没有旋转操作 才需要继续向上?
当然是:par 经过旋转后才需要继续向上,若 par 不需要旋转,则 gpa 没有发生左右子树高度差变化,反之,par 经过旋转后 gpa 对应 par 子树的高度减小,则可能失衡。
所以 par 为经旋转是退出循环的条件。
继续回溯时,注意改变父节点的 bf。
再看 二(cur 只有一个孩子):
① cur 只有一个孩子,则该孩子一定没有孩子(否则 cur 不是平衡的)。
② 删除 cur,par 在 cur 的子树上高度一定减小,par 则有可能失衡,即 par 是第一个可能失衡点。
③ 删除 cur 时,用 cur 的孩子替代 cur 并删除 cur 的孩子,然后从 par 开始回溯判断是否需要调整,退出循环条件与前文一致。
至此,删除说明到此为止,AVL 树的说明也到此为止,最后给出示例代码。
测试代码 main.cpp:
#include <iostream>
#include "AVLTree.h"
using std::cout;
using std::endl;
int main()
{
AVLTree<int> avl;
auto Add = [&avl](int _key)
{
cout << "Add " << _key << ":" << endl;
avl.insert(_key);
avl.levelTraversal();
cout << endl << "size: " << avl.size() << " level: " << avl.level() << endl << endl;
};
auto il = { , , , , , , };
for (auto& x : il) Add(x);
auto Del = [&avl](int _key)
{
cout << "Del " << _key << ":" << endl;
avl.erase(_key);
avl.levelTraversal();
cout << endl << "size: " << avl.size() << " level: " << avl.level() << endl << endl;
};
Del(); Del(); Del();
;
}
头文件 AVLTree.h:
#pragma once
#ifndef __AVLTREE_H__
#define __AVLTREE_H__
#include"BinaryTreeOperations.h"
template<typename _Ty>
class AVLTree
{
private:
struct Node
{
_Ty key;
;
Node* left = nullptr;
Node* right = nullptr;
Node* parent = nullptr;
Node(const _Ty& _key) :key(_key) {}
};
public:
AVLTree() = default;
~AVLTree() { BTO::clear(root); size_n = ; }
; }
void preorderTraversal() { BTO::preorderTraversal(root, drawData); }
void inorderTraversal() { BTO::inorderTraversal(root, drawData); }
void postorderTraversal() { BTO::postorderTraversal(root, drawData); }
void iterativePreorderTraversal() { BTO::iterativePreorderTraversal(root, drawData); }
void iterativeInorderTraversal() { BTO::iterativeInorderTraversal(root, drawData); }
void iterativePostorderTraversal() { BTO::iterativePostorderTraversal(root, drawData); }
void levelTraversal() { BTO::levelTraversal(root, drawData); }
Node* find(const _Ty& _key) { return BTO::find(root, _key); }
Node* iterativeFind(const _Ty& _key) { return BTO::iterativeFind(root, _key); }
Node* findMaximum() { return BTO::findMaximum(root); }
Node* findMinimum() { return BTO::findMinimum(root); }
size_t level() { return BTO::getLevel(root); }
size_t size() const { return size_n; }
void insert(const _Ty&);
bool erase(const _Ty&);
void erase(Node*);
private:
void LL_R(Node*);
void RR_L(Node*);
void LR_LR(Node*);
void RL_RL(Node*);
static void drawData(const Node* _node) { std::cout << _node->key << " "; }
private:
size_t size_n = ;
Node* root = nullptr;
};
template<typename _Ty>
void AVLTree<_Ty>::LL_R(Node* _node)
{
_node = BTO::rightRotate(_node);
_node->bf = _node->right->bf = ;
if (_node->parent == nullptr) root = _node;
}
template<typename _Ty>
void AVLTree<_Ty>::RR_L(Node* _node)
{
_node = BTO::leftRotate(_node);
_node->bf = _node->left->bf = ;
if (_node->parent == nullptr) root = _node;
}
template<typename _Ty>
void AVLTree<_Ty>::LR_LR(Node* _node)
{
BTO::leftRotate(_node->left);
_node = BTO::rightRotate(_node);
if (_node->right->right == nullptr)
_node->left->bf = _node->right->bf = ;
else
{
if (_node->right->left == nullptr)
{
_node->right->bf = ;
_node->left->bf = ;
}
else
{
_node->left->bf = ;
_node->right->bf = -;
}
}
_node->bf = ;
if (_node->parent == nullptr) root = _node;
}
template<typename _Ty>
void AVLTree<_Ty>::RL_RL(Node* _node)
{
BTO::rightRotate(_node->right);
_node = BTO::leftRotate(_node);
if (_node->left->left == nullptr)
_node->left->bf = _node->right->bf = ;
else
{
if (_node->left->right == nullptr)
{
_node->left->bf = -;
_node->right->bf = ;
}
else
{
_node->left->bf = ;
_node->right->bf = ;
}
}
_node->bf = ;
if (_node->parent == nullptr) root = _node;
}
template<typename _Ty>
void AVLTree<_Ty>::insert(const _Ty& _key)
{
auto ret = BTO::insert(root, _key);
if (ret.second) ++size_n;
else return;
auto temp = ret.first;
if (temp->parent == nullptr) return;
;
;
temp = temp->parent;
if (temp->left != nullptr && temp->right != nullptr) return;
Node* pa = temp->parent;
while (pa != nullptr)
{
if (temp == pa->left)
pa->bf += -;
else
pa->bf += ;
)
{
) LL_R(pa);
else LR_LR(pa);
break;
}
)
{
) RL_RL(pa);
else RR_L(pa);
break;
}
temp = pa;
pa = pa->parent;
}
}
template<typename _Ty>
bool AVLTree<_Ty>::erase(const _Ty& _key)
{
bool succeed = false;
Node* del = BTO::find(root, _key);
if (del != nullptr)
{
erase(del);
succeed = true;
}
return succeed;
}
template<typename _Ty>
void AVLTree<_Ty>::erase(Node* _node)
{
if (_node == nullptr) return;
--size_n;
Node* pa = nullptr;
Node* temp = nullptr;
if (_node->left == nullptr && _node->right == nullptr)
{
if (_node == root)
{
root = nullptr;
delete _node;
return;
}
if (_node == _node->parent->left)
{
_node->parent->left = nullptr;
_node->parent->bf += ;
temp = _node->parent->right;
}
else
{
_node->parent->right = nullptr;
_node->parent->bf += -;
temp = _node->parent->left;
}
pa = _node->parent;
delete _node;
}
else if (!(_node->left != nullptr && _node->right != nullptr))
{
if (_node->parent == nullptr)
{
if (_node->left != nullptr) root = _node->left;
else root = _node->right;
root->parent = nullptr;
delete _node;
return;
}
if (_node == _node->parent->left)
{
_node->parent->left = _node->left == nullptr ? _node->right : _node->left;
if (_node->left != nullptr) _node->left->parent = _node->parent;
else _node->right->parent = _node->parent;
_node->parent->bf += ;
temp = _node->parent->right;
}
else
{
_node->parent->right = _node->left == nullptr ? _node->right : _node->left;
if (_node->left != nullptr) _node->left->parent = _node->parent;
else _node->right->parent = _node->parent;
_node->parent->bf += -;
temp = _node->parent->left;
}
pa = _node->parent;
delete _node;
}
else
{
Node* de = BTO::findMinimum(_node->right);
_node->key = de->key;
++size_n;
erase(de);
}
)
{
temp = pa;
pa = pa->parent;
if (pa != nullptr)
{
if (temp == pa->left)
{
temp = pa->right;
pa->bf += ;
}
else
{
temp = pa->left;
pa->bf += -;
}
}
}
while (pa != nullptr)
{
)
{
|| temp->bf == ) LL_R(pa);
else LR_LR(pa);
}
)
{
) RL_RL(pa);
else RR_L(pa);
}
else break;
: ;
pa = temp->parent;
if (pa != nullptr)
{
if (isLeft)
{
temp = pa->left;
pa->bf += -;
}
else
{
temp = pa->right;
pa->bf += ;
}
}
}
}
#endif // !__AVLTREE_H__
二叉树(3)AVL 树的更多相关文章
- 二叉树与AVL树
二叉树 什么是二叉树? 父节点至多只有两个子树的树形结构成为二叉树.如下图所示,图1不是二叉树,图2是一棵二叉树. 图1 普通的树 ...
- 二叉树,AVL树和红黑树
为了接下来能更好的学习TreeMap和TreeSet,讲解一下二叉树,AVL树和红黑树. 1. 二叉查找树 2. AVL树 2.1. 树旋转 2.1.1. 左旋和右旋 2.1.2. 左左,右右,左右, ...
- 二叉树-二叉查找树-AVL树-遍历
一.二叉树 定义:每个节点都不能有多于两个的儿子的树. 二叉树节点声明: struct treeNode { elementType element; treeNode * left; treeNod ...
- python常用算法(5)——树,二叉树与AVL树
1,树 树是一种非常重要的非线性数据结构,直观的看,它是数据元素(在树中称为节点)按分支关系组织起来的结构,很像自然界中树那样.树结构在客观世界中广泛存在,如人类社会的族谱和各种社会组织机构都可用树形 ...
- 5分钟了解二叉树之AVL树
转载请注明出处:https://www.cnblogs.com/morningli/p/16033733.html AVL树是带有平衡条件的二叉查找树,其每个节点的左子树和右子树的高度最多相差1.为了 ...
- 二叉树之AVL树的平衡实现(递归与非递归)
这篇文章用来复习AVL的平衡操作,分别会介绍其旋转操作的递归与非递归实现,但是最终带有插入示例的版本会以递归呈现. 下面这张图绘制了需要旋转操作的8种情况.(我要给做这张图的兄弟一个赞)后面会给出这八 ...
- 二叉树之AVL树
高度为 h 的 AVL 树,节点数 N 最多2^h − 1: 最少N(h)=N(h− 1) +N(h− 2) + 1. 最少节点数n 如以斐波那契数列可以用数学归纳法证明: 即: N(0) = 0 ( ...
- 04-树4. Root of AVL Tree-平衡查找树AVL树的实现
对于一棵普通的二叉查找树而言,在进行多次的插入或删除后,容易让树失去平衡,导致树的深度不是O(logN),而接近O(N),这样将大大减少对树的查找效率.一种解决办法就是要有一个称为平衡的附加的结构条件 ...
- AVL树和伸展树 -数据结构(C语言实现)
读数据结构与算法分析 AVL树 带有平衡条件的二叉树,通常要求每颗树的左右子树深度差<=1 可以将破坏平衡的插入操作分为四种,最后通过旋转恢复平衡 破坏平衡的插入方式 描述 恢复平衡旋转方式 L ...
- 【数据结构】什么是AVL树
目录 什么是AVL树 1. 什么是AVL树 2. 节点的实现 3. AVL树的调整 3.1 LL旋转 3.2 RR旋转 3.3 RL旋转 3.4 LR旋转 什么是AVL树 二叉查找树的一个局限性就是有 ...
随机推荐
- ubuntu14.04安装google chrome
安装好Ubuntu14.04之后安装google chrome浏览器 1.按下 Ctrl + Alt + t 键盘组合键,启动终端 2.在终端中,输入以下命令 (将下载源加入到系统的源列表.命令的反馈 ...
- C/S编程
https://blog.csdn.net/antony1776/article/details/73717666 实现C/S程序,加上登录注册聊天等功能. 然后要做个协议的样子出来. 比如说注册功能 ...
- Linux实现树莓派3B的国密SM9算法交叉编译——(三)国密SM9算法实现
先参考这篇文章 Linux实现树莓派3B的国密SM9算法交叉编译——(二)miracl库的测试与静态库的生成 进行miracl库的交叉编译测试,并生成miracl静态链接库. 这篇文章主要介绍基于mi ...
- Codeforces Gym 102361A Angle Beats CCPC2019秦皇岛A题 题解
题目链接:https://codeforces.com/gym/102361/problem/A 题意:给定二维平面上的\(n\)个点,\(q\)次询问,每次加入一个点,询问平面上有几个包含该点的直角 ...
- Win10安装.Net Framework4.7及更高版本
问题描述 使用VS打开项目工程时,提示未安装.net framework4.7,但在启用或关闭windows功能里已经勾选了.net framework 4.7的全部功能. 直接从网上下载.net f ...
- 安卓开发:Android Studio自动import
我只想说,真好用!哈哈,提高效率的好东西. 参考: [https://blog.csdn.net/pjdd123/article/details/80953669] [https://www.cnbl ...
- 对DensePose: Dense Human Pose Estimation In The Wild的理解
研究方法 通过完全卷积学习从图像像素到密集模板网格的映射.将此任务作为一个回归问题,并利用手动注释的面部标注来训练我们的网络.使用这样的标注,在三维对象模板和输入图像之间,建立密集的对应领域,然后作为 ...
- JAVA基础学习(2)之判断
2判断 2.1比较 2.1.1比较 System.out.println(amount>=10);输出的值为true或false 2.1.2关系运算 优先级 <算术运算 >赋值运算 ...
- NOIP-- 模拟-----机器
机器翻译 题目描述 小晨的电脑上安装了一个机器翻译软件,他经常用这个软件来翻译英语文章. 这个翻译软件的原理很简单,它只是从头到尾,依次将每个英文单词用对应的中文含义来替换.对于每个英文单词,软件会先 ...
- plupload上传视频插件jQuery+php
我在网上找到一个很好的视频上传插件,经过我的一些整理.补充,在这里分享给大家. 这个视频插件是新浪微博plupload上传视频插件,支持格式有mpg,m4v,mp4,flv,3gp,mov,avi,r ...