DJI-A2调参详细教程
DJI-A2飞控系统用户手册
https://wenku.baidu.com/view/bb632f88227916888586d749.html
DJI-A2调参软件视频教程
http://www.bilibili.com/video/av7767675/
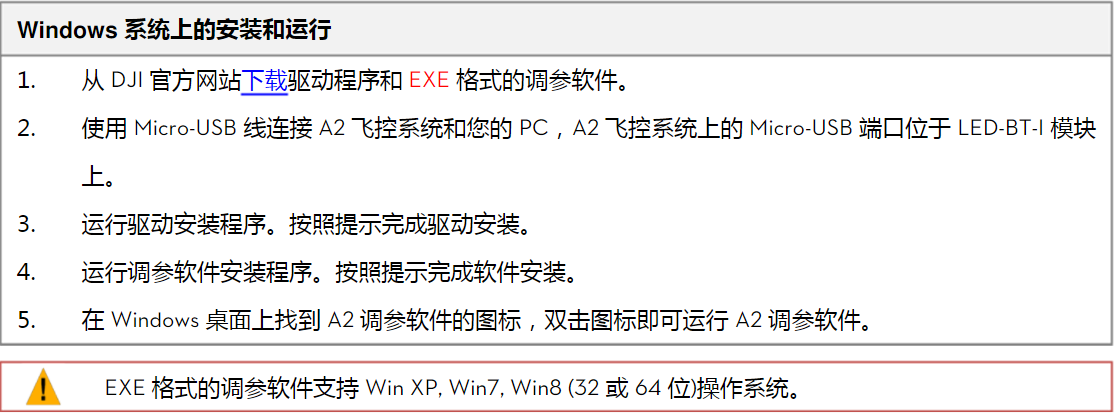
一:安装驱动程序和调参软件
要先在DJI官网下载软件。
下载完软件后,点击进去主界面
调参过程需要为系统供电,
注意:USB端口最多能提供500mA电流,则需要接电池供电。

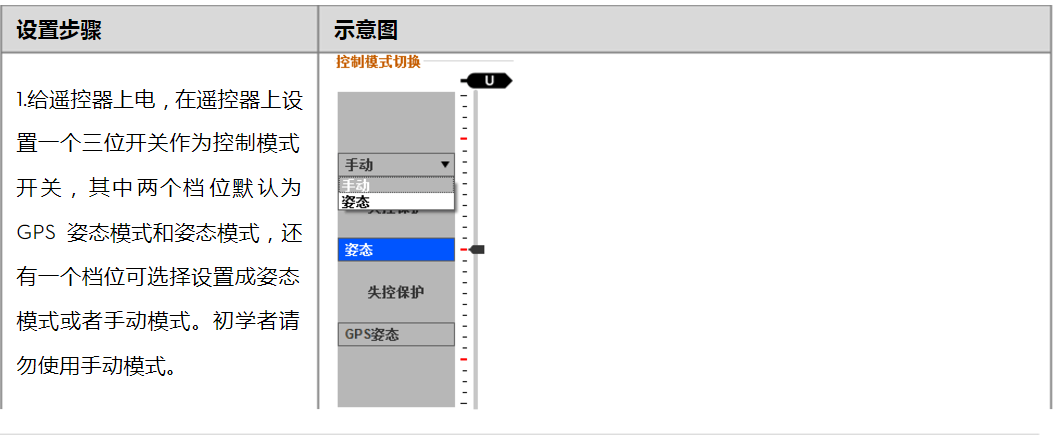
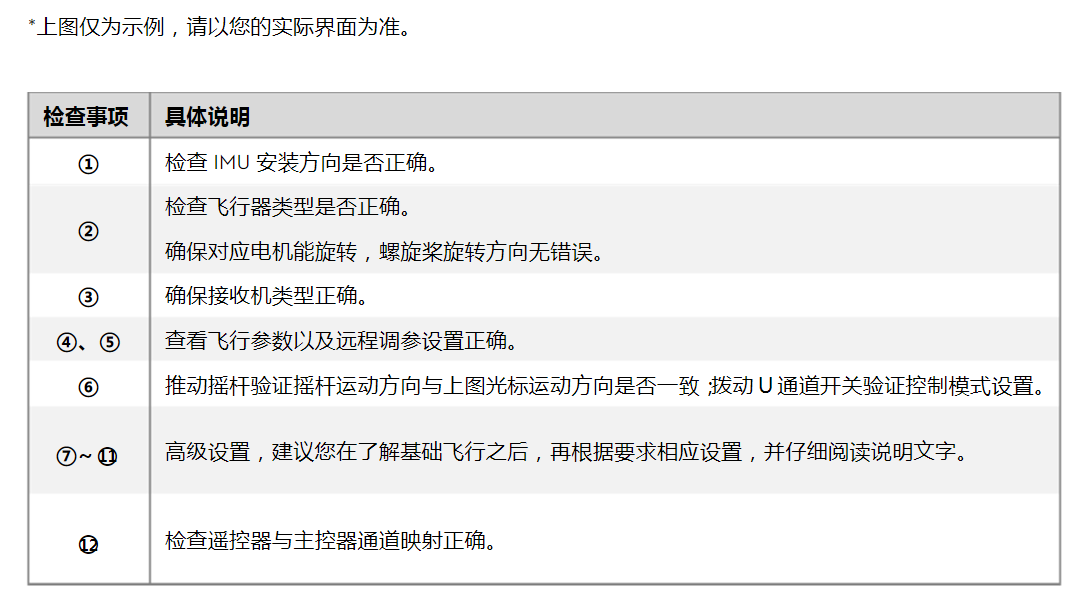
飞行控制模式


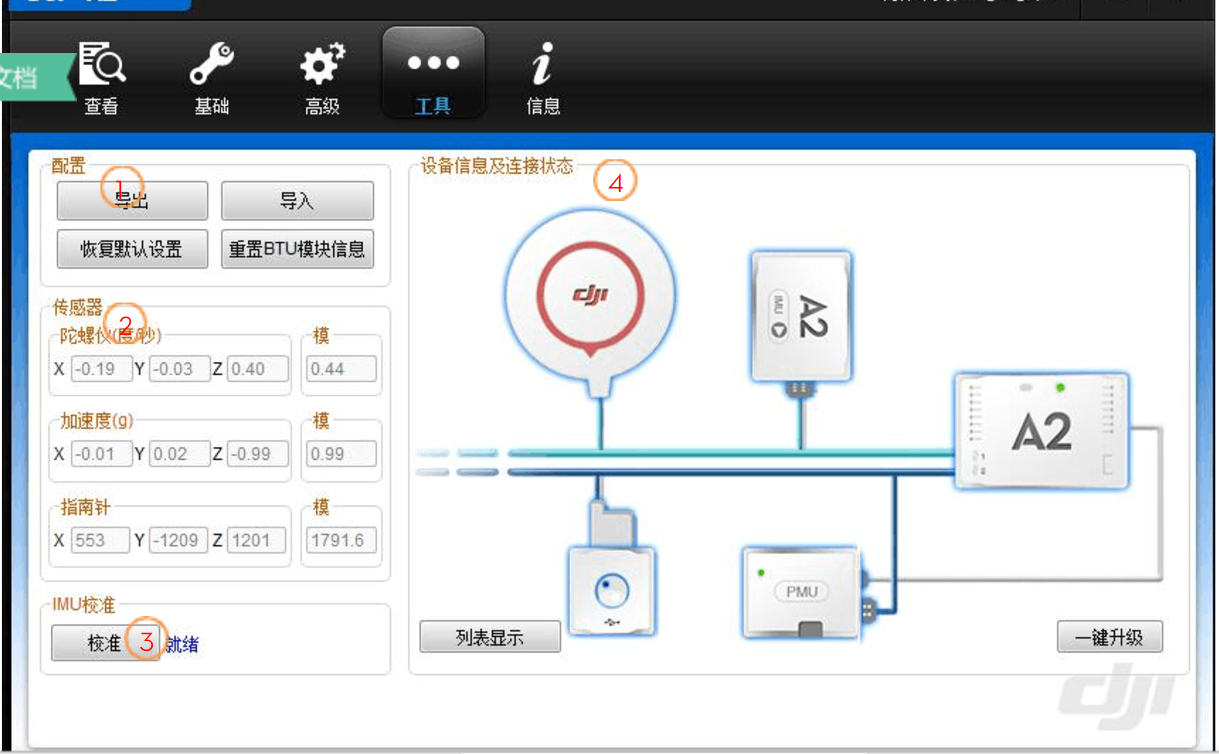
2、工具检查

工具:调参系数的保存导出导入,陀螺仪、加速度计、指南针信息,IMU校准。
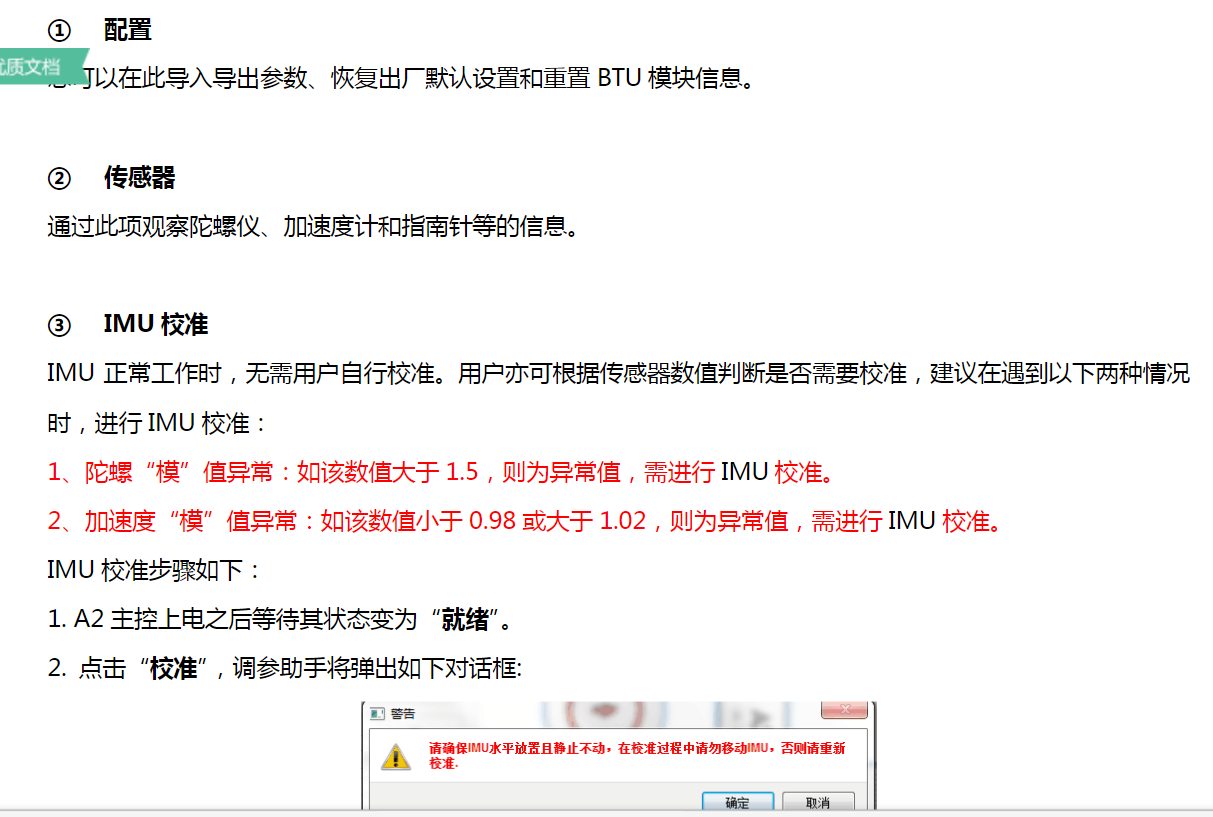
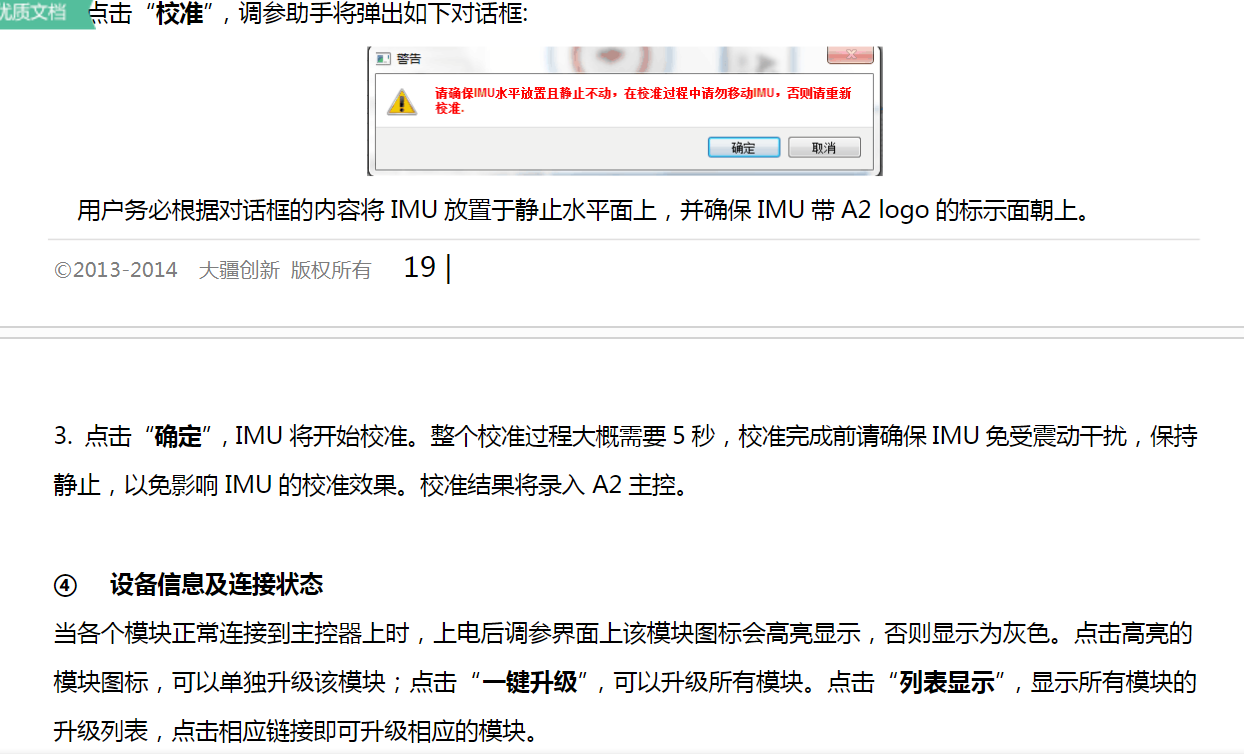
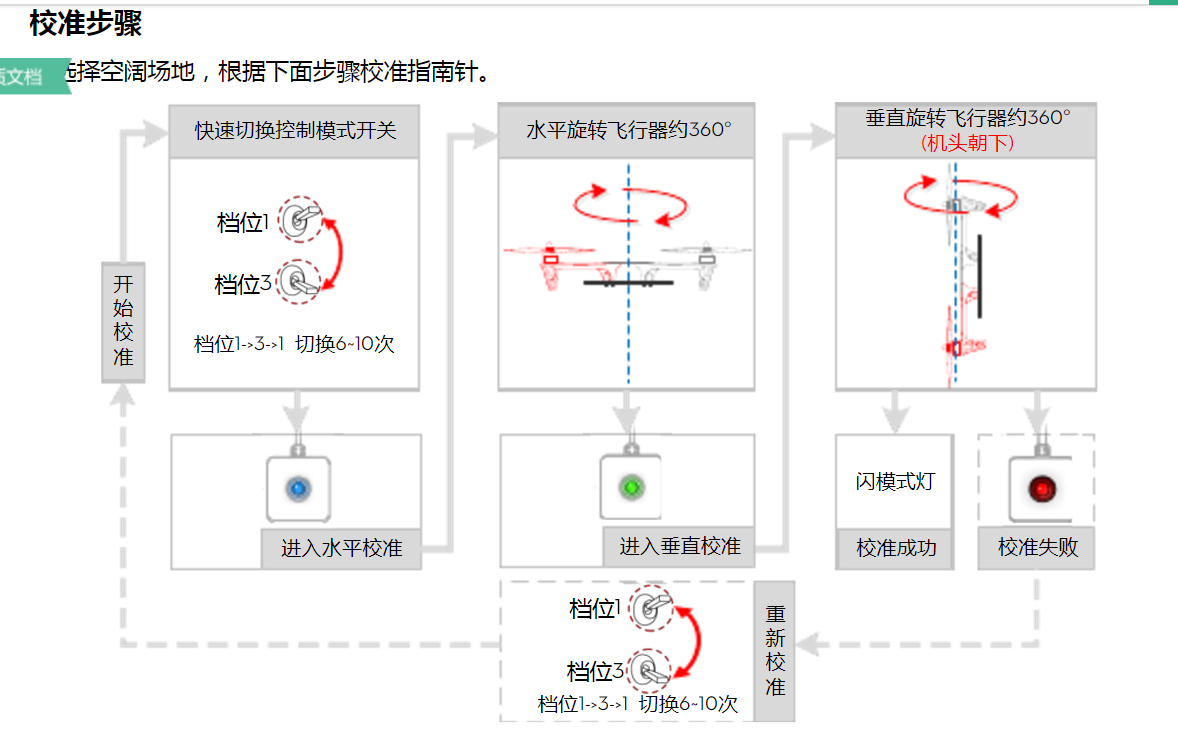
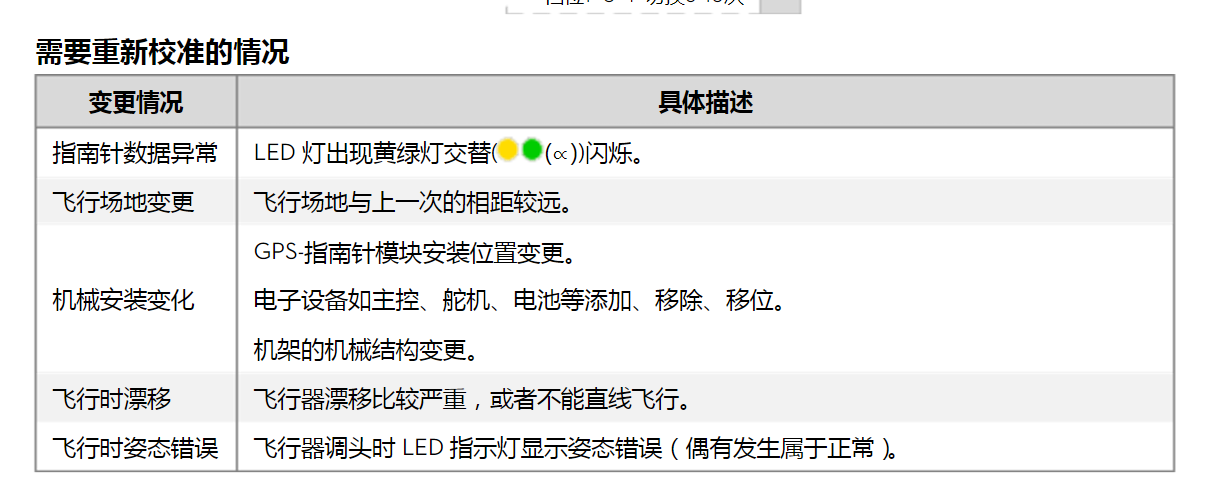
指南针校准:

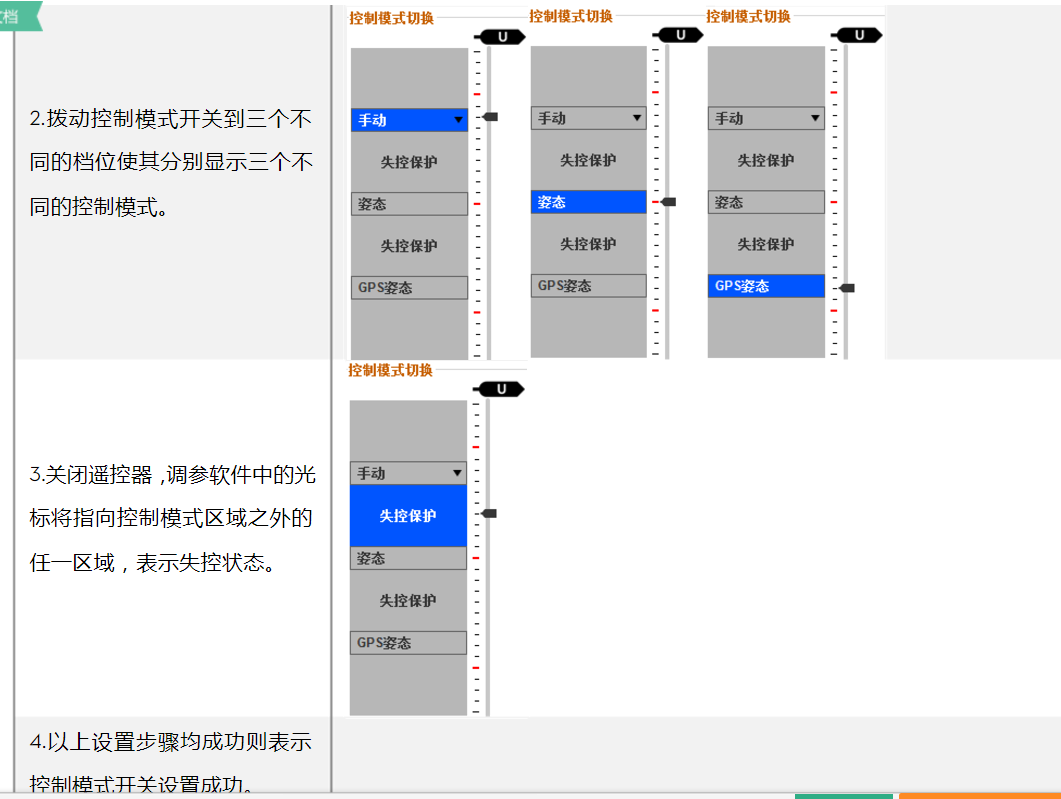
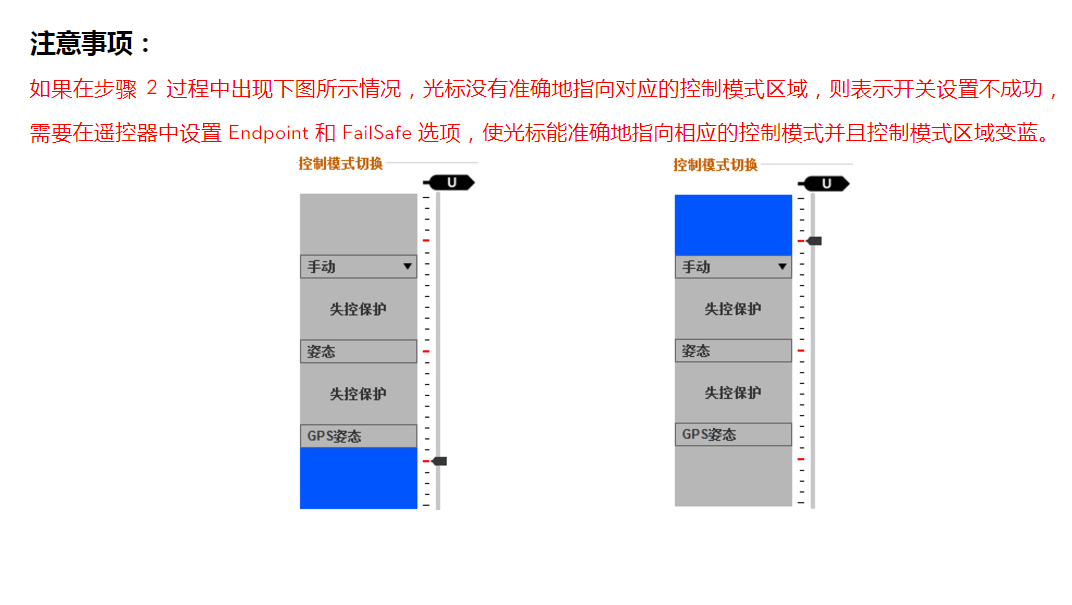
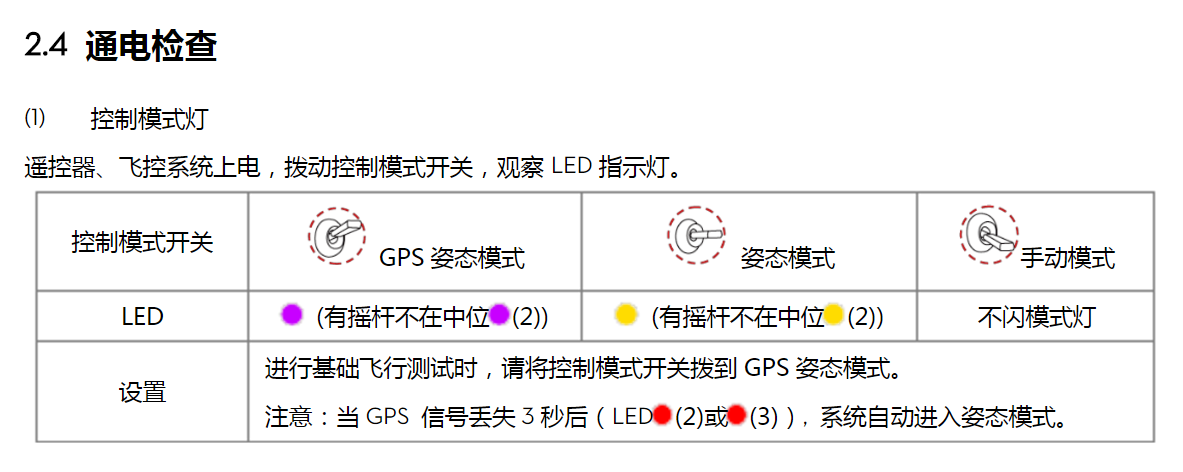
控制模式介绍:
GPS姿态模式:GPS信号强时使用,合适在场外空旷地方。
姿态模式:狭小空间,无GPS,仅能稳定姿态。
手动模式:紧急情况,重新拿回控制权
通电检查:通电后,GPS姿态模式显示紫灯,姿态模式显示黄灯,手动模式不显示。
红灯一闪或不闪表明GPS信号强

注意:紫灯6快闪表明确定返航点位置。(记住了回家的路)

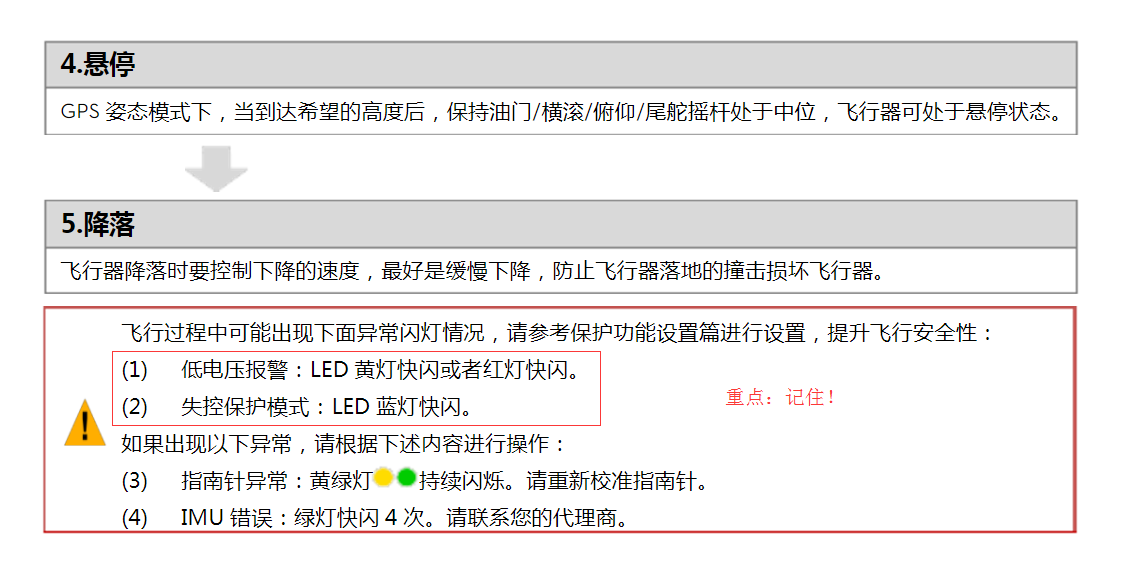
注意:低电压报警:LED黄灯快闪或者红灯快闪。
失控保护模式:LED蓝灯快闪。

等待GPS信号,红灯不闪推动油门杆,第一次启动电机起飞,飞控记录当前飞行位置作为返航位置。


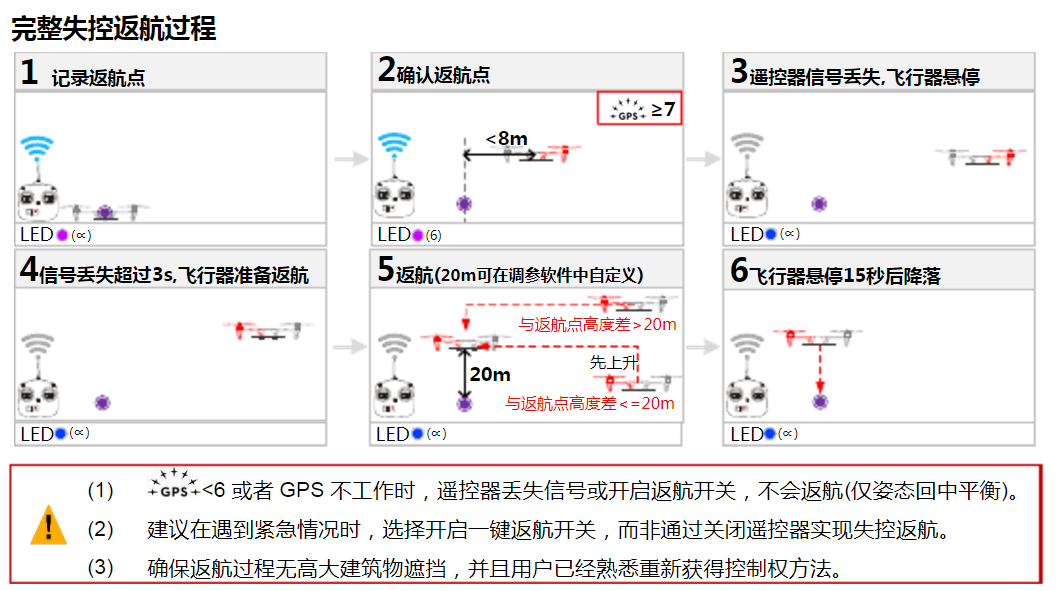
返航去过程:记录返航点——确认返航点——信号丢失,飞行器悬停——信号丢失超过3s,飞行器准备返航——升到指定高度——悬停15秒后悬停
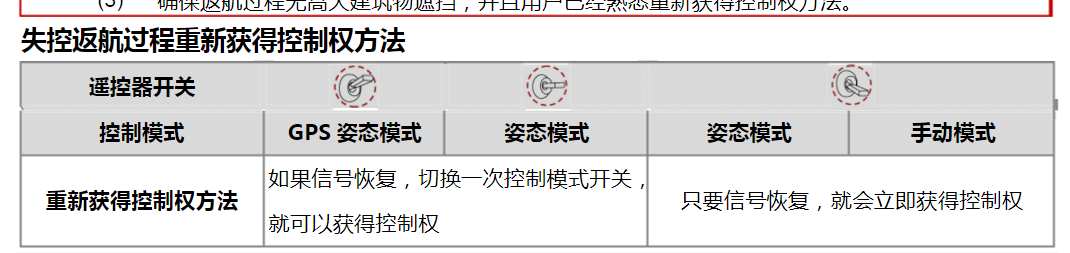
返航过程中如何夺回控制权?切换飞行模式
DJI-A2调参详细教程的更多相关文章
- 工程能力UP | LightGBM的调参干货教程与并行优化
这是个人在竞赛中对LGB模型进行调参的详细过程记录,主要包含下面六个步骤: 大学习率,确定估计器参数n_estimators/num_iterations/num_round/num_boost_ro ...
- SpringMVC前后端分离交互传参详细教程
温故而知新,本文为一时兴起写出,如有错误还请指正 本文后台基于SpringBoot2.5.6编写,前端基于Vue2 + axios和微信小程序JS版分别编写进行联调测试,用于理解前后端分离式开发的交互 ...
- xgboost的sklearn接口和原生接口参数详细说明及调参指点
from xgboost import XGBClassifier XGBClassifier(max_depth=3,learning_rate=0.1,n_estimators=100,silen ...
- 8元电调调参教程(使用Arduino Uno)| BLHeli无刷电调的固件烧写及调参
前言 淘某上有款8元电调,性价比很高,但是需要简单设置一下 1.材料清单 (1)Arduino UNO开发板 (2)BLHeliSuite 16.7.14.9.0.1 调参软件及固件已上传Gitee: ...
- scikit-learn 梯度提升树(GBDT)调参小结
在梯度提升树(GBDT)原理小结中,我们对GBDT的原理做了总结,本文我们就从scikit-learn里GBDT的类库使用方法作一个总结,主要会关注调参中的一些要点. 1. scikit-learn ...
- Windows7 64位系统搭建Cocos2d-x-2.2.1最新版以及Android交叉编译环境(详细教程)
Windows7 64位系统搭建Cocos2d-x-2.2.1最新版以及Android交叉编译环境(详细教程) 声明:本教程在参考了以下博文,并经过自己的摸索后实际操作得出,本教程系本人原创,由于升级 ...
- Solr集群搭建详细教程(二)
注:欢迎大家转载,非商业用途请在醒目位置注明本文链接和作者名dijia478,商业用途请联系本人dijia478@163.com. 之前步骤:Solr集群搭建详细教程(一) 三.solr集群搭建 注意 ...
- 漫谈PID——实现与调参
闲话: 作为一个控制专业的学生,说起PID,真是让我又爱又恨.甚至有时候会觉得我可能这辈子都学不会pid了,但是经过一段时间的反复琢磨,pid也不是很复杂.所以在看懂pid的基础上,写下这篇文章,方便 ...
- CatBoost算法和调参
欢迎关注博主主页,学习python视频资源 sklearn实战-乳腺癌细胞数据挖掘(博主亲自录制视频) https://study.163.com/course/introduction.htm?co ...
随机推荐
- 学习REST
REST:Representational State Transfer,资源的表现状态转换.可以理解为对资源的操作. 1. 资源 资源就是业务对象,如图片.文本.歌曲或者客户.交易等.这些是用户 ...
- Caused by: java.lang.ClassNotFoundException: Didn't find class "io.grpc.helloworldexample.HelloworldActivity" on path: DexPathList
FAQ: Android app 编译好后安装到手机,运行时闪退,报如下错误: java.lang.RuntimeException: Unable to instantiate activity ...
- 使用Filter跟踪Asp.net MVC页面加载(转)
转载地址:http://www.cnblogs.com/JustRun1983/p/4027929.html 最近,客户一直反馈系统使用慢,有时候能够指出具体是哪个页面,有时候又只是笼统地反馈慢.这种 ...
- 1.RN环境搭建,创建项目,使用夜神模拟调试
1.环境搭建(Yarn.React Native 的命令行工具(react-native-cli)) npm install -g yarn react-native-cli 具体参考 参见官方(中文 ...
- centos6.9编译安装nginx
1.安装nginx所需的依赖包: yum -y install gcc gcc-c++ autoconf automake zlib zlib-devel openssl openssl-devel ...
- vue 常用手册
基本使用 引入vue.js 创建Vue对象, 指定选项对象 el : 指定dom标签容器的选择器 data : 指定初始化状态属性数据的对象对象/函数(返回一个对象) 页面中 使用v-model: 实 ...
- PHP远程下载图片,微信头像存到本地,本地图片转base64
方法一(推荐): function download_remote_pic($url){ $header = [ 'User-Agent: Mozilla/5.0 (Windows NT 6.1; W ...
- P1057 传球游戏 dp
题目描述 上体育课的时候,小蛮的老师经常带着同学们一起做游戏.这次,老师带着同学们一起做传球游戏. 游戏规则是这样的:nn个同学站成一个圆圈,其中的一个同学手里拿着一个球,当老师吹哨子时开始传球,每个 ...
- Excel ——多表关联查询-vlookup
一.分组 需求: 在B列的右侧添加一列[消费分组]对B列的[月分组水平]进行分组,原始数据如下: 公式:在 C2 输入:“=VLOOKUP(B2,$E$1:$G$4,2,1)”,下拉填充. 提示:VL ...
- javascript记忆
Math.round()和ToFixed() Math.round(1.6)=2 Math.round(-1.4)=-1 var k = 1.74.toFixed(1), m = 1.75.toFix ...