opencv车道线检测
opencv车道线检测
完成的功能
- 图像裁剪:通过设定图像ROI区域,拷贝图像获得裁剪图像
- 反透视变换:用的是老师给的视频,没有对应的变换矩阵。所以建立二维坐标,通过四点映射的方法计算矩阵,进行反透视变化。后因ROI区域的设置易造成变换矩阵获取困难和插值像素得到的透视图效果不理想,故没应用。
- 二值化:先变化为灰度图,然后设定阈值直接变成二值化图像。
- 形态学滤波:对二值化图像进行腐蚀,去除噪点;然后对图像进行膨胀,弥补对车道线的腐蚀。
- 边缘检测:canny变化、sobel变化和laplacian变化中选择了效果比较好的canny变化,三者在代码中均可用,canny变化效果稍微好一点。
- 直线检测:实现了两种方法①使用opencv库封装好的霍夫直线检测函数,在原图对应区域用红线描出车道线②自己写了一种直线检测,在头文件中,遍历ROI区域进行特定角度范围的直线检测。 两种方法均可在视频中体现,第一种方法运行效率较快。
- 按键控制:空格暂停,其余键退出,方便调试和截图。
实现的效果
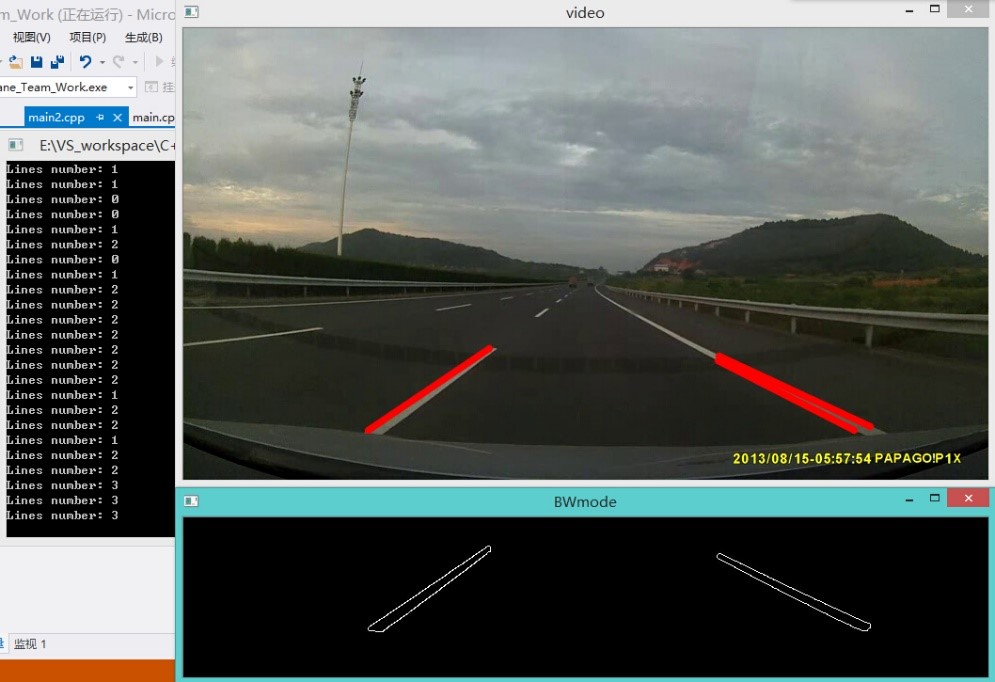
在亮度良好道路条件良好的情况下,检测车前区域的车道线实现比较成功,排除掉高速护栏的影响,而且原图像还能完整体现。
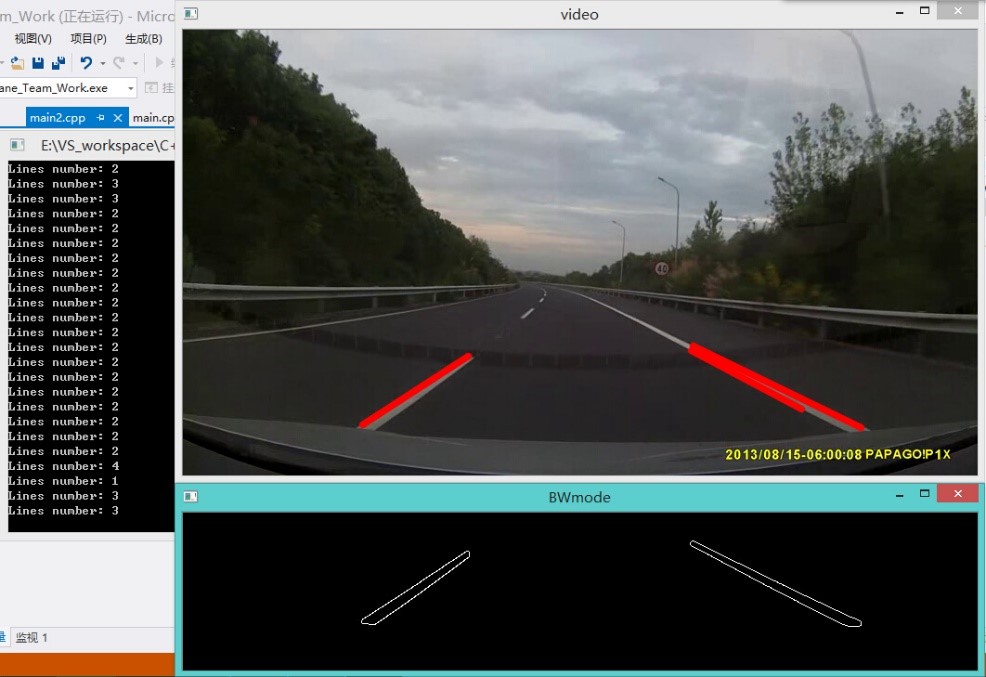
车子行驶在高速公路大型弯道上,可以在一定角度范围内认定车道线仍是直线,检测出为直线。
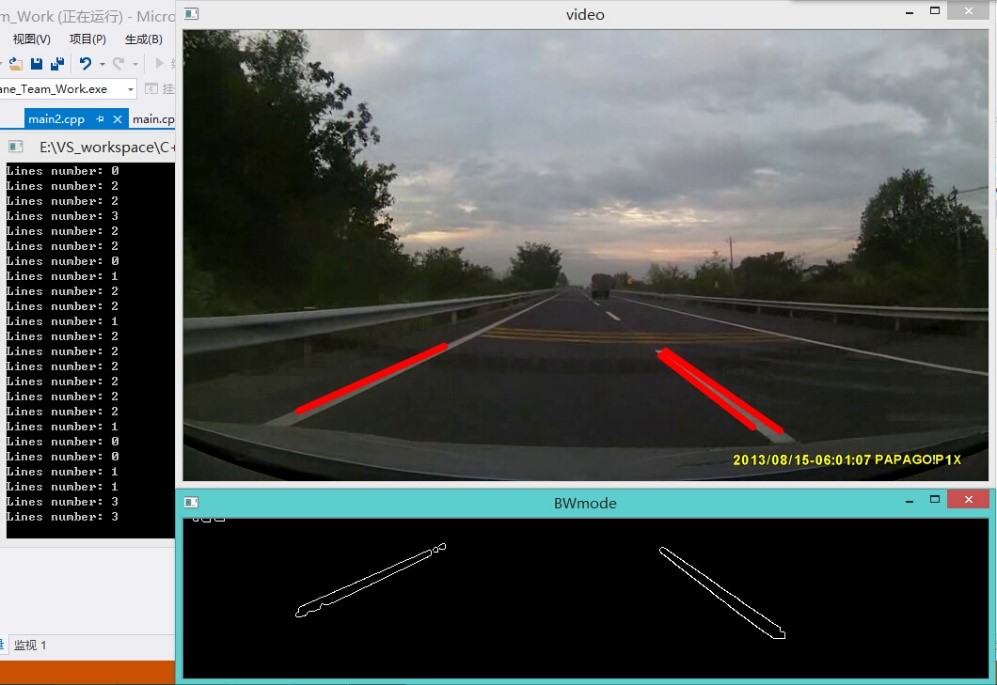
车子切换过程中只有一根车道线被识别,但是稳定回变换车道后,实现效果良好。减速线为黄色,二值化是也被过滤,没造成影响。
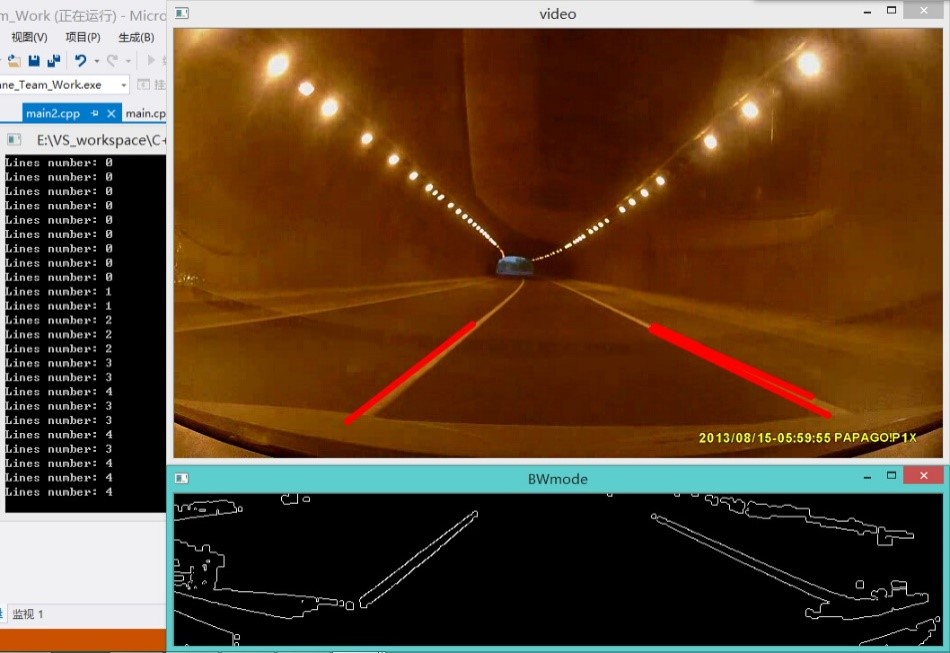
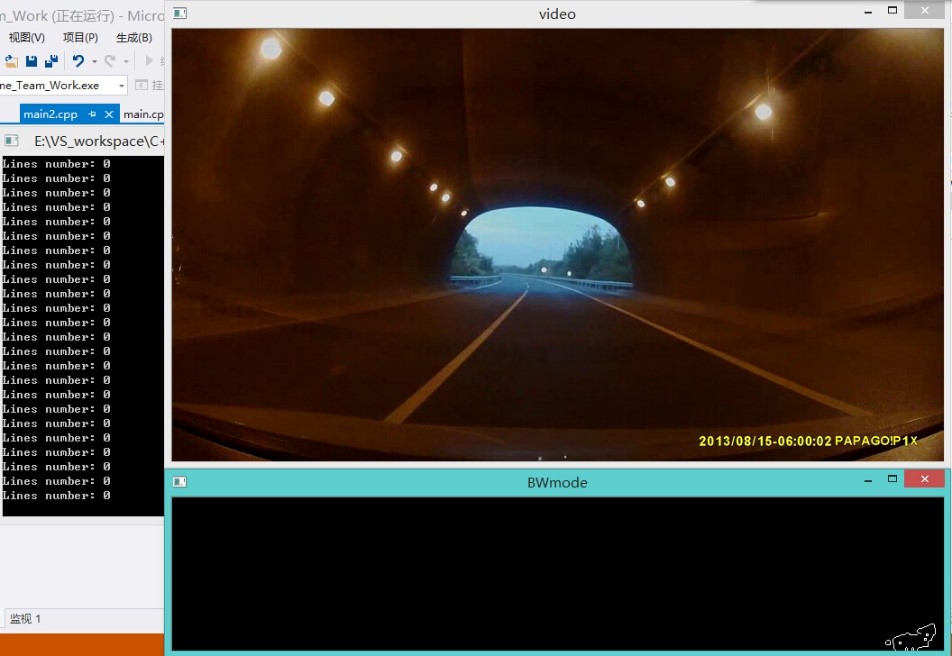
刚进入隧道时,摄像机光源基本处于高光状态,拍摄亮度基本不变,二值化图像时情况良好,噪声比较多但是没产生多大线状影响;当摄像头自动调节亮度,图像亮度变低,二值化时同一阈值把车道线给过滤掉,造成无法识别车道线的现象。
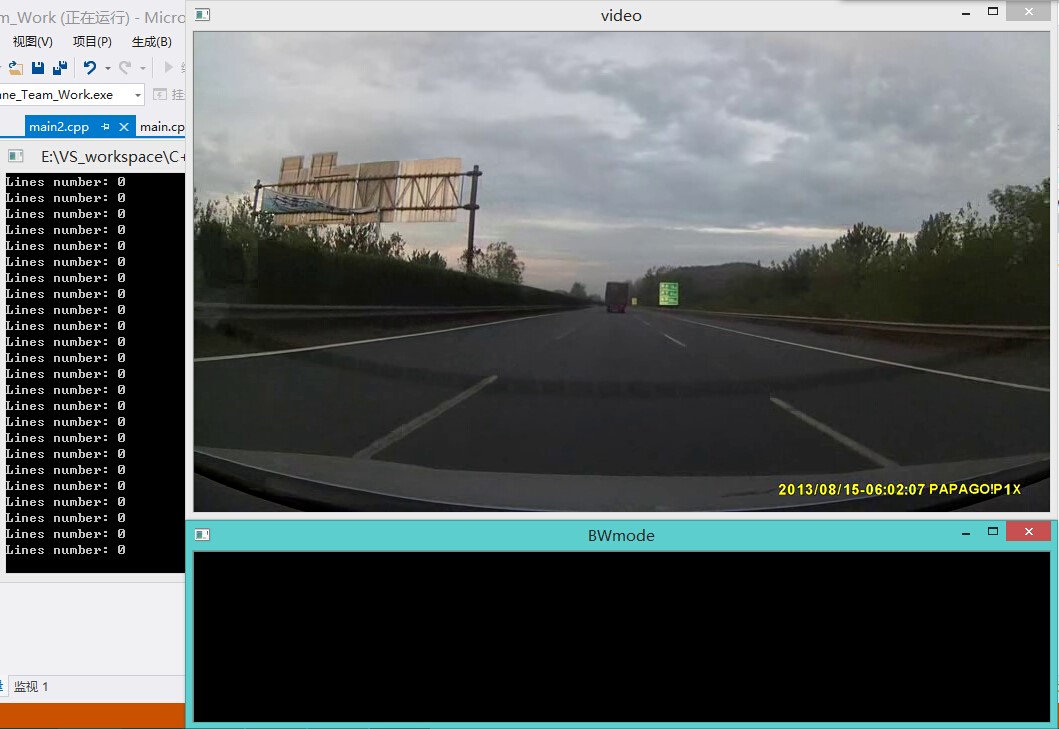
在道路损坏的情况下,由于阈值一定,基本上检测不出车道线。
结论
实现的功能:实现了车道线检测的基本功能,反透视变换矩阵实现了但效果不太理想,使用自己写的直线检测部分,车道线识别抗干扰能力较强。
缺点:整个识别系统都是固定的参数,只能在特定的环境产生良好的效果。
改进空间:提取全部关键参数,每次对ROI图像进行快速扫描更新参数,否则使用默认参数。例如,可以选择每次5间隔取点,以像素最高点的85%作为该次二值化的阈值。从而做到动态车道线识别。
完整代码
方法一:
main.cpp
#include<cv.h>
#include<cxcore.h>
#include<highgui.h>
#include"mylinedetect.h"
#include<cstdio>
#include<iostream>
using namespace std;
int main(){
//声明IplImage指针
IplImage* pFrame = NULL;
IplImage* pCutFrame = NULL;
IplImage* pCutFrImg = NULL;
//声明CvCapture指针
CvCapture* pCapture = NULL;
//声明CvMemStorage和CvSeg指针
CvMemStorage* storage = cvCreateMemStorage();
CvSeq* lines = NULL;
//生成视频的结构
VideoWriter writer("result.avi", CV_FOURCC('M', 'J', 'P', 'G'), 25.0, Size(856, 480));
//当前帧数
int nFrmNum = 0;
//裁剪的天空高度
int CutHeight = 310;
//窗口命名
cvNamedWindow("video", 1);
cvNamedWindow("BWmode", 1);
//调整窗口初始位置
cvMoveWindow("video", 300, 0);
cvMoveWindow("BWmode", 300, 520);
//不能打开则退出
if (!(pCapture = cvCaptureFromFile("lane.avi"))){
fprintf(stderr, "Can not open video file\n");
return -2;
}
//每次读取一桢的视频
while (pFrame = cvQueryFrame(pCapture)){
//设置ROI裁剪图像
cvSetImageROI(pFrame, cvRect(0, CutHeight, pFrame->width, pFrame->height - CutHeight));
nFrmNum++;
//第一次要申请内存p
if (nFrmNum == 1){
pCutFrame = cvCreateImage(cvSize(pFrame->width, pFrame->height - CutHeight), pFrame->depth, pFrame->nChannels);
cvCopy(pFrame, pCutFrame, 0);
pCutFrImg = cvCreateImage(cvSize(pCutFrame->width, pCutFrame->height), IPL_DEPTH_8U, 1);
//转化成单通道图像再处理
cvCvtColor(pCutFrame, pCutFrImg, CV_BGR2GRAY);
}
else{
//获得剪切图
cvCopy(pFrame, pCutFrame, 0);
#if 0 //反透视变换
//二维坐标下的点,类型为浮点
CvPoint2D32f srcTri[4], dstTri[4];
CvMat* warp_mat = cvCreateMat(3, 3, CV_32FC1);
//计算矩阵反射变换
srcTri[0].x = 10;
srcTri[0].y = 20;
srcTri[1].x = pCutFrame->width - 5;
srcTri[1].y = 0;
srcTri[2].x = 0;
srcTri[2].y = pCutFrame->height - 1;
srcTri[3].x = pCutFrame->width - 1;
srcTri[3].y = pCutFrame->height - 1;
//改变目标图像大小
dstTri[0].x = 0;
dstTri[0].y = 0;
dstTri[1].x = pCutFrImg->width - 1;
dstTri[1].y = 0;
dstTri[2].x = 0;
dstTri[2].y = pCutFrImg->height - 1;
dstTri[3].x = pCutFrImg->width - 1;
dstTri[3].y = pCutFrImg->height - 1;
//获得矩阵
cvGetPerspectiveTransform(srcTri, dstTri, warp_mat);
//反透视变换
cvWarpPerspective(pCutFrame, pCutFrImg, warp_mat);
#endif
//前景图转换为灰度图
cvCvtColor(pCutFrame, pCutFrImg, CV_BGR2GRAY);
//二值化前景图
cvThreshold(pCutFrImg, pCutFrImg, 80, 255.0, CV_THRESH_BINARY);
//进行形态学滤波,去掉噪音
cvErode(pCutFrImg, pCutFrImg, 0, 2);
cvDilate(pCutFrImg, pCutFrImg, 0, 2);
//canny变化
cvCanny(pCutFrImg, pCutFrImg, 50, 120);
//sobel变化
//Mat pCutFrMat(pCutFrImg);
//Sobel(pCutFrMat, pCutFrMat, pCutFrMat.depth(), 1, 1);
//laplacian变化
//Laplacian(pCutFrMat, pCutFrMat, pCutFrMat.depth());
#if 1 //0为下面的代码,1为上面的代码
#pragma region Hough直线检测
lines = cvHoughLines2(pCutFrImg, storage, CV_HOUGH_PROBABILISTIC, 1, CV_PI / 180, 100, 15, 15);
printf("Lines number: %d\n", lines->total);
//画出直线
for (int i = 0; i<lines->total; i++){
CvPoint* line = (CvPoint*)cvGetSeqElem(lines, i);
double k = ((line[0].y - line[1].y)*1.0 / (line[0].x - line[1].x));
cout<<"nFrmNum "<<nFrmNum<<" 's k = "<<k<<endl;
if(!(abs(k)<0.1))//去掉水平直线
cvLine(pFrame, line[0], line[1], CV_RGB(255, 0, 0), 6, CV_AA);
}
#pragma endregion
#else
#pragma region mylinedetect
Mat edge(pCutFrImg);
vector<struct line> lines = detectLine(edge, 60);
Mat pFrameMat(pFrame);
drawLines(pFrameMat, lines);
namedWindow("mylinedetect", 1);
imshow("mylinedetect", pFrameMat);
#pragma endregion
#endif
//恢复ROI区域
cvResetImageROI(pFrame);
//写入视频流
writer << pFrame;
//显示图像
cvShowImage("video", pFrame);
cvShowImage("BWmode", pCutFrImg);
//按键事件,空格暂停,其他跳出循环
int temp = cvWaitKey(2);
if (temp == 32){
while (cvWaitKey() == -1);
}
else if (temp >= 0){
break;
}
}
}
//销毁窗口
cvDestroyWindow("video");
cvDestroyWindow("BWmode");
//释放图像
cvReleaseImage(&pCutFrImg);
cvReleaseImage(&pCutFrame);
cvReleaseCapture(&pCapture);
return 0;
}
mylinedetect.h
#include "opencv2/imgproc/imgproc.hpp"
#include "opencv2/highgui/highgui.hpp"
#include <iostream>
#include <vector>
#include <cmath>
using namespace cv;
using namespace std;
const double pi = 3.1415926f;
const double RADIAN = 180.0 / pi;
struct line{
int theta;
int r;
};
vector<struct line> detectLine(Mat &img, int threshold){
vector<struct line> lines;
int diagonal = floor(sqrt(img.rows*img.rows + img.cols*img.cols));
vector< vector<int> >p(360, vector<int>(diagonal));
//统计数量
for (int j = 0; j < img.rows; j++) {
for (int i = 0; i < img.cols; i++) {
if (img.at<unsigned char>(j, i) > 0){
for (int theta = 0; theta < 360; theta++){
int r = floor(i*cos(theta / RADIAN) + j*sin(theta / RADIAN));
if (r < 0)
continue;
p[theta][r]++;
}
}
}
}
//获得最大值
for (int theta = 0; theta < 360; theta++){
for (int r = 0; r < diagonal; r++){
int thetaLeft = max(0, theta - 1);
int thetaRight = min(359, theta + 1);
int rLeft = max(0, r - 1);
int rRight = min(diagonal - 1, r + 1);
int tmp = p[theta][r];
if (tmp > threshold
&& tmp > p[thetaLeft][rLeft] && tmp > p[thetaLeft][r] && tmp > p[thetaLeft][rRight]
&& tmp > p[theta][rLeft] && tmp > p[theta][rRight]
&& tmp > p[thetaRight][rLeft] && tmp > p[thetaRight][r] && tmp > p[thetaRight][rRight]){
struct line newline;
newline.theta = theta;
newline.r = r;
lines.push_back(newline);
}
}
}
return lines;
}
void drawLines(Mat &img, const vector<struct line> &lines){
for (int i = 0; i < lines.size(); i++){
vector<Point> points;
int theta = lines[i].theta;
int r = lines[i].r;
double ct = cos(theta / RADIAN);
double st = sin(theta / RADIAN);
//公式 r = x*ct + y*st
//计算左边
int y = int(r / st);
if (y >= 0 && y < img.rows){
Point p(0, y);
points.push_back(p);
}
//计算右边
y = int((r - ct*(img.cols - 1)) / st);
if (y >= 0 && y < img.rows){
Point p(img.cols - 1, y);
points.push_back(p);
}
//计算上边
int x = int(r / ct);
if (x >= 0 && x < img.cols){
Point p(x, 0);
points.push_back(p);
}
//计算下边
x = int((r - st*(img.rows - 1)) / ct);
if (x >= 0 && x < img.cols){
Point p(x, img.rows - 1);
points.push_back(p);
}
//画线
cv::line(img, points[0], points[1], Scalar(255, 0, 0), 5, CV_AA);
}
}
方法二:
#include<cv.h>
#include<cxcore.h>
#include<highgui.h>
#include<cstdio>
#include<iostream>
using namespace std;
int main(){
//声明IplImage指针
IplImage* pFrame = NULL;
IplImage* pCutFrame = NULL;
IplImage* pCutFrImg = NULL;
IplImage* pCutBkImg = NULL;
//声明CvMat指针
CvMat* pCutFrameMat = NULL;
CvMat* pCutFrMat = NULL;
CvMat* pCutBkMat = NULL;
//声明CvCapture指针
CvCapture* pCapture = NULL;
//声明CvMemStorage和CvSeg指针
CvMemStorage* storage = cvCreateMemStorage();
CvSeq* lines = NULL;
//当前帧数
int nFrmNum = 0;
//裁剪的天空高度
int CutHeight = 250;
//窗口命名
cvNamedWindow("video", 1);
//cvNamedWindow("background", 1);
cvNamedWindow("foreground", 1);
//调整窗口初始位置
cvMoveWindow("video", 300, 30);
cvMoveWindow("background", 100, 100);
cvMoveWindow("foreground", 300, 370);
//不能打开则退出
if (!(pCapture = cvCaptureFromFile("lane.avi"))){
fprintf(stderr, "Can not open video file\n");
return -2;
}
//每次读取一桢的视频
while (pFrame = cvQueryFrame(pCapture)){
//设置ROI裁剪图像
cvSetImageROI(pFrame, cvRect(0, CutHeight, pFrame->width, pFrame->height - CutHeight));
nFrmNum++;
//第一次要申请内存p
if (nFrmNum == 1){
pCutFrame = cvCreateImage(cvSize(pFrame->width, pFrame->height - CutHeight), pFrame->depth, pFrame->nChannels);
cvCopy(pFrame, pCutFrame, 0);
pCutBkImg = cvCreateImage(cvSize(pCutFrame->width, pCutFrame->height), IPL_DEPTH_8U, 1);
pCutFrImg = cvCreateImage(cvSize(pCutFrame->width, pCutFrame->height), IPL_DEPTH_8U, 1);
pCutBkMat = cvCreateMat(pCutFrame->height, pCutFrame->width, CV_32FC1);
pCutFrMat = cvCreateMat(pCutFrame->height, pCutFrame->width, CV_32FC1);
pCutFrameMat = cvCreateMat(pCutFrame->height, pCutFrame->width, CV_32FC1);
//转化成单通道图像再处理
cvCvtColor(pCutFrame, pCutBkImg, CV_BGR2GRAY);
cvCvtColor(pCutFrame, pCutFrImg, CV_BGR2GRAY);
//转换成矩阵
cvConvert(pCutFrImg, pCutFrameMat);
cvConvert(pCutFrImg, pCutFrMat);
cvConvert(pCutFrImg, pCutBkMat);
}
else{
//获得剪切图
cvCopy(pFrame, pCutFrame, 0);
//前景图转换为灰度图
cvCvtColor(pCutFrame, pCutFrImg, CV_BGR2GRAY);
cvConvert(pCutFrImg, pCutFrameMat);
//高斯滤波先,以平滑图像
cvSmooth(pCutFrameMat, pCutFrameMat, CV_GAUSSIAN, 3, 0, 0.0);
//当前帧跟背景图相减
cvAbsDiff(pCutFrameMat, pCutBkMat, pCutFrMat);
//二值化前景图
cvThreshold(pCutFrMat, pCutFrImg, 35, 255.0, CV_THRESH_BINARY);
//进行形态学滤波,去掉噪音
cvErode(pCutFrImg, pCutFrImg, 0, 1);
cvDilate(pCutFrImg, pCutFrImg, 0, 1);
//更新背景
cvRunningAvg(pCutFrameMat, pCutBkMat, 0.003, 0);
//pCutBkMat = cvCloneMat(pCutFrameMat);
//将背景转化为图像格式,用以显示
//cvConvert(pCutBkMat, pCutBkImg);
cvCvtColor(pCutFrame, pCutBkImg, CV_BGR2GRAY);
//canny变化
cvCanny(pCutFrImg, pCutFrImg, 50, 100);
#pragma region Hough检测
lines = cvHoughLines2(pCutFrImg, storage, CV_HOUGH_PROBABILISTIC, 1, CV_PI / 180, 100, 30, 15);
printf("Lines number: %d\n", lines->total);
//画出直线
for (int i = 0; i<lines->total; i++){
CvPoint* line = (CvPoint* )cvGetSeqElem(lines, i);
cvLine(pCutFrame, line[0], line[1], CV_RGB(255, 0, 0), 6, CV_AA);
}
#pragma endregion
//显示图像
cvShowImage("video", pCutFrame);
cvShowImage("background", pCutBkImg);
cvShowImage("foreground", pCutFrImg);
//按键事件,空格暂停,其他跳出循环
int temp = cvWaitKey(2);
if (temp == 32){
while (cvWaitKey() == -1);
}
else if (temp >= 0){
break;
}
}
//恢复ROI区域(多余可去掉)
cvResetImageROI(pFrame);
}
//销毁窗口
cvDestroyWindow("video");
cvDestroyWindow("background");
cvDestroyWindow("foreground");
//释放图像和矩阵
cvReleaseImage(&pCutFrImg);
cvReleaseImage(&pCutBkImg);
cvReleaseImage(&pCutFrame);
cvReleaseMat(&pCutFrameMat);
cvReleaseMat(&pCutFrMat);
cvReleaseMat(&pCutBkMat);
cvReleaseCapture(&pCapture);
return 0;
}
opencv车道线检测的更多相关文章
- 深度学习笔记(十四)车道线检测 SCNN
论文:Spatial As Deep: Spatial CNN for Traffic Scene Understanding 代码:https://github.com/XingangPan/SCN ...
- 深度学习笔记(十二)车道线检测 LaneNet
论文:Towards End-to-End Lane Detection: an Instance Segmentation Approach 代码:https://github.com/MaybeS ...
- Lane-Detection 近期车道线检测论文阅读总结
近期阅读的几篇关于车道线检测的论文总结. 1. 车道线检测任务需求分析 1.1 问题分析 针对车道线检测任务,需要明确的问题包括: (1)如何对车道线建模,即用什么方式来表示车道线. 从应用的角度来说 ...
- 3D车道线检测:Gen-LaneNet
3D车道线检测:Gen-LaneNet Gen-LaneNet: A Generalized and Scalable Approach for 3D Lane Detection 论文链接:http ...
- 带你读AI论文丨LaneNet基于实体分割的端到端车道线检测
摘要:LaneNet是一种端到端的车道线检测方法,包含 LanNet + H-Net 两个网络模型. 本文分享自华为云社区<[论文解读]LaneNet基于实体分割的端到端车道线检测>,作者 ...
- SCNN车道线检测--(SCNN)Spatial As Deep: Spatial CNN for Traffic Scene Understanding(论文解读)
Spatial As Deep: Spatial CNN for Traffic Scene Understanding 收录:AAAI2018 (AAAI Conference on Artific ...
- 语义分割之车道线检测Lanenet(tensorflow版)
Lanenet 一个端到端的网络,包含Lanenet+HNet两个网络模型,其中,Lanenet完成对车道线的实例分割,HNet是一个小网络结构,负责预测变换矩阵H,使用转换矩阵H对同属一条车道线的所 ...
- 车道线检测LaneNet
LaneNet LanNet Segmentation branch 完成语义分割,即判断出像素属于车道or背景 Embedding branch 完成像素的向量表示,用于后续聚类,以完成实例分割 H ...
- 车道线检测github集锦
re1. github_lane_detection; end
随机推荐
- css的border效果
<!DOCTYPE html> <html lang="en"> <head> <meta charset="UTF-8&quo ...
- asp.net常用字符串函数
/// <summary> /// 提取字符串中的数字 /// </summary> /// <param name="str"></pa ...
- WP_3种磁贴效果设置
private void ApplicationBarIconButton_Click_1(object sender, EventArgs e) { var tileData = new FlipT ...
- Unable to add App ID because the '10' App ID limit in '7' days has been exceeded.
Unable to add App ID because the '10' App ID limit in '7' days has been exceeded. 官方的原因是对bundle iden ...
- Android开发教程 录音和播放
首先要了解andriod开发中andriod多媒体框架包含了什么,它包含了获取和编码多种音频格式的支持,因此你几耍轻松把音频合并到你的应用中,若设备支持,使用MediaRecorder APIs便可以 ...
- chrome调试学习
参考:http://ued.taobao.com/blog/2012/06/debug-with-chrome-dev-tool/ http://guoshuang.com/frontend/chro ...
- ASP.NET中application对象
ASP.NET中application对象的使用. Application对象的应用 1.使用Application对象保存信息 (1).使用Application对象保存信息 Applicat ...
- php spl
最近在重构后台,自写rbac,发现自己在设计模式方面尤为欠缺,没有一个长远的目光,所以打算静下心来看一看自己平时不关注的功能,spl就是其中之一. spl是Standard PHP Library(P ...
- mysql 修改字段长度
mysql 修改字段长度 alter table news modify column title varchar(130); alter table 表名 modify column 字段名 类型 ...
- mssql 下删除 default 值的Sql写法
FROM Sys.default_constraints a JOIN sys.columns b ON a.parent_object_id = b.object_id AND a.parent_c ...