(stm32学习总结)—SPI-FLASH 实验
SPI总线
SPI 简介

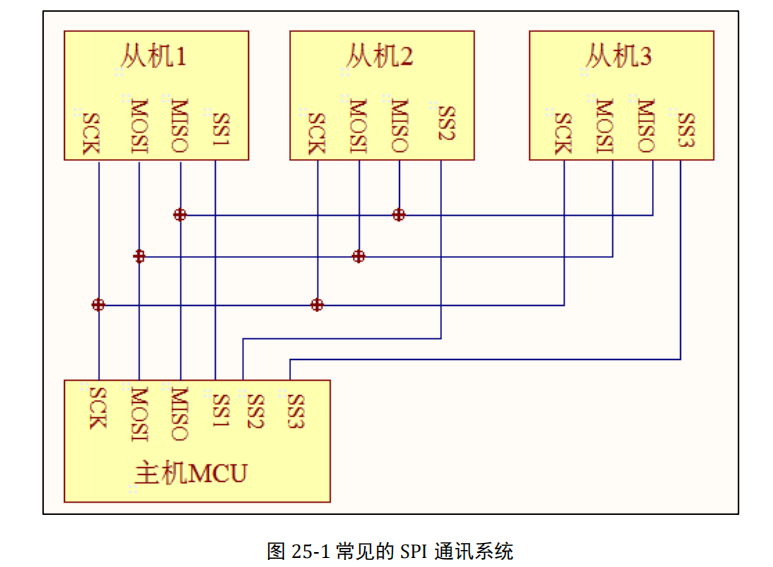
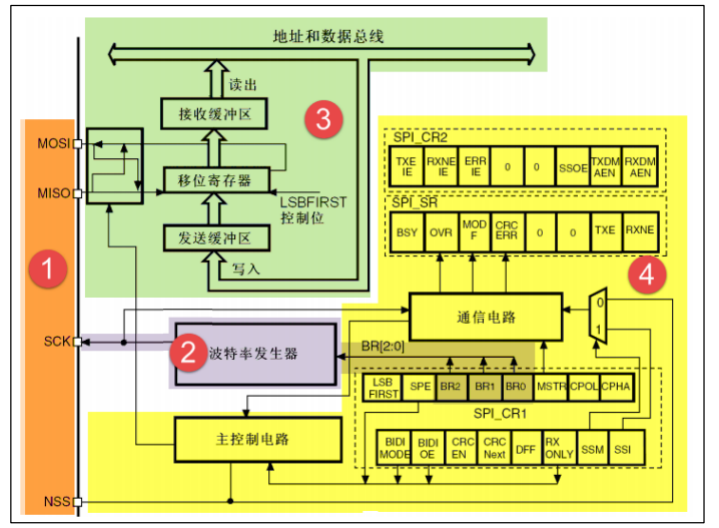
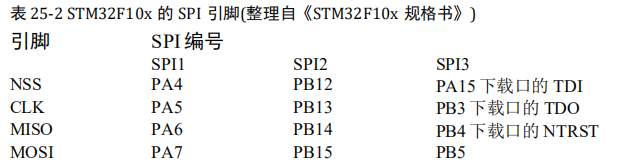
SPI 物理层
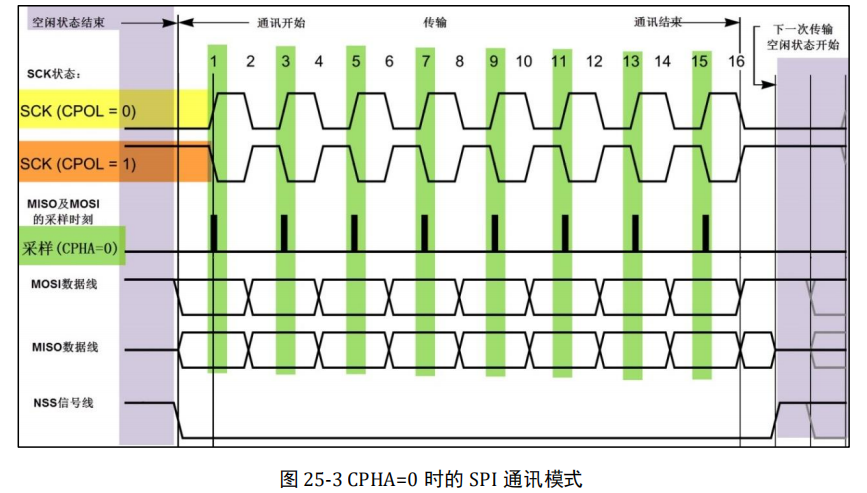
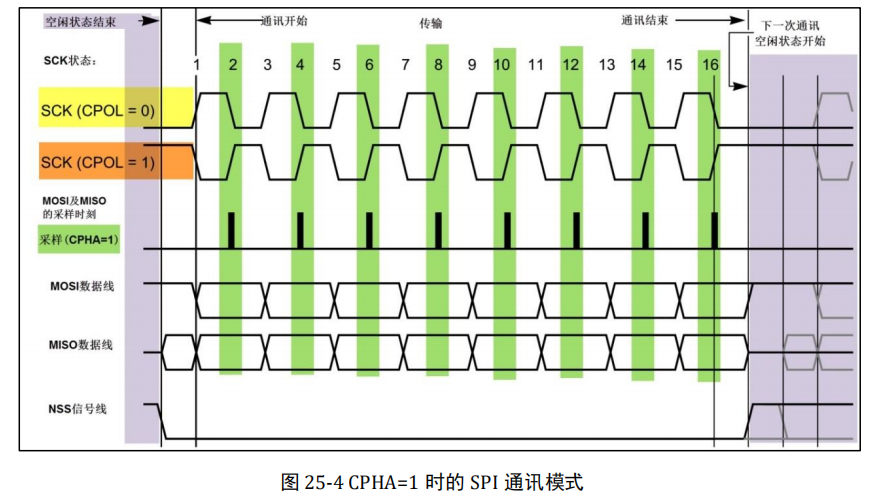
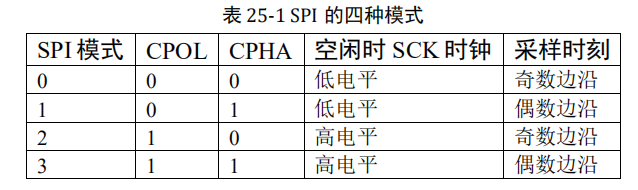
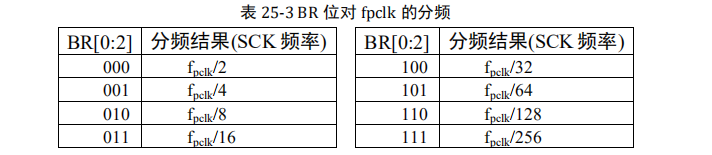
协议层

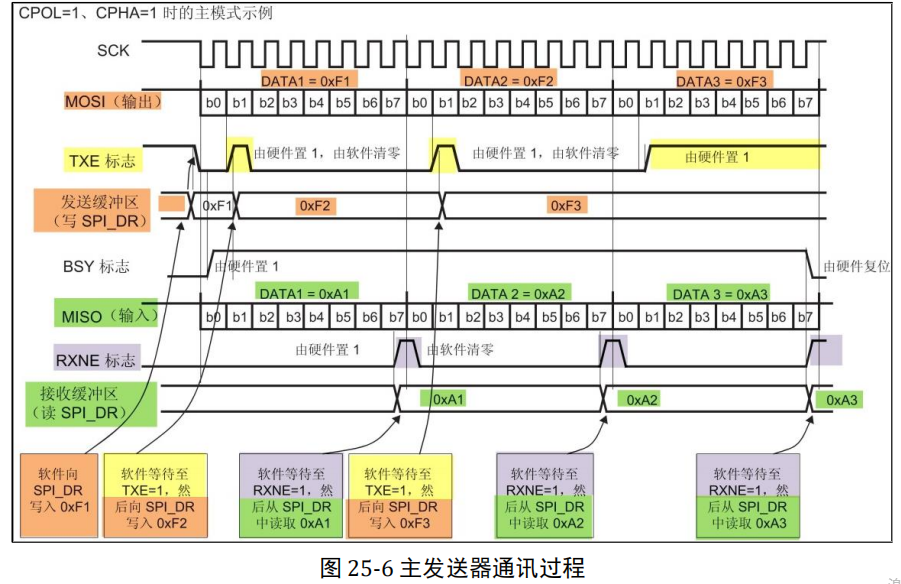
通讯过程
SPI 初始化结构体详解

SPI 配置步骤
(3)使能(开启)SPI
spi配置代码(只配置了spi1)
1 #ifndef _spi_H
2 #define _spi_H
3
4 #include "system.h"
5
6 void SPI1_Init(void); //初始化SPI1口
7 void SPI1_SetSpeed(u8 SpeedSet); //设置SPI1速度
8 u8 SPI1_ReadWriteByte(u8 TxData);//SPI1总线读写一个字节
9
10 //void SPI2_Init(void); //初始化SPI2口
11 //void SPI2_SetSpeed(u8 SpeedSet); //设置SPI2速度
12 //u8 SPI2_ReadWriteByte(u8 TxData);//SPI2总线读写一个字节
13
14 #endif
1 #include "spi.h"
2
3 //以下是SPI模块的初始化代码,配置成主机模式
4 //SPI口初始化
5 //这里针是对SPI1的初始化
6 void SPI1_Init(void)
7 {
8 GPIO_InitTypeDef GPIO_InitStructure;
9 SPI_InitTypeDef SPI_InitStructure;
10
11 /* SPI的IO口和SPI外设打开时钟 */
12 RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
13 RCC_APB2PeriphClockCmd(RCC_APB2Periph_SPI1, ENABLE);
14
15 /* SPI的IO口设置 */
16 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5 | GPIO_Pin_6 | GPIO_Pin_7;
17 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
18 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
19 GPIO_Init(GPIOA, &GPIO_InitStructure);
20
21 SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex; //设置SPI单向或者双向的数据模式:SPI设置为双线双向全双工
22 SPI_InitStructure.SPI_Mode = SPI_Mode_Master; //设置SPI工作模式:设置为主SPI
23 SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b; //设置SPI的数据大小:SPI发送接收8位帧结构
24 SPI_InitStructure.SPI_CPOL = SPI_CPOL_High; //串行同步时钟的空闲状态为高电平
25 SPI_InitStructure.SPI_CPHA = SPI_CPHA_2Edge; //串行同步时钟的第二个跳变沿(上升或下降)数据被采样
26 SPI_InitStructure.SPI_NSS = SPI_NSS_Soft; //NSS信号由硬件(NSS管脚)还是软件(使用SSI位)管理:内部NSS信号有SSI位控制
27 SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_256; //定义波特率预分频的值:波特率预分频值为256
28 SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB; //指定数据传输从MSB位还是LSB位开始:数据传输从MSB位开始
29 SPI_InitStructure.SPI_CRCPolynomial = 7; //CRC值计算的多项式
30 SPI_Init(SPI1, &SPI_InitStructure); //根据SPI_InitStruct中指定的参数初始化外设SPIx寄存器
31
32 SPI_Cmd(SPI1, ENABLE); //使能SPI外设
33
34 SPI1_ReadWriteByte(0xff);//启动传输
35 }
36
37 //SPI1速度设置函数
38 //SPI速度=fAPB2/分频系数
39 //@ref SPI_BaudRate_Prescaler:SPI_BaudRatePrescaler_2~SPI_BaudRatePrescaler_256
40 //fAPB2时钟一般为84Mhz:
41 void SPI1_SetSpeed(u8 SPI_BaudRatePrescaler)
42 {
43 SPI1->CR1&=0XFFC7;//位3-5清零,用来设置波特率
44 SPI1->CR1|=SPI_BaudRatePrescaler; //设置SPI1速度
45 SPI_Cmd(SPI1,ENABLE); //使能SPI1
46 }
47
48 //SPI1 读写一个字节
49 //TxData:要写入的字节
50 //返回值:读取到的字节
51 u8 SPI1_ReadWriteByte(u8 TxData)
52 {
53
54 while (SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_TXE) == RESET);//等待发送区空
55
56 SPI_I2S_SendData(SPI1, TxData); //通过外设SPIx发送一个byte 数据
57
58 while (SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_RXNE) == RESET); //等待接收完一个byte
59
60 return SPI_I2S_ReceiveData(SPI1); //返回通过SPIx最近接收的数据
61
62 }
上述程序中的一个奇怪的地方
在复用SPI总线时,必须先设置总线端口。读取其他ARM芯片(如NXP)一般很容易看出芯片的设置是否正确。不过对于STM32就容易让人迷惑了。就像上述程序中,我们在使用SPI总线进行通信时,可以这样设置:
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5 | GPIO_Pin_6 | GPIO_Pin_7
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; // 复用的推挽输出
其他端口如时钟端口以及MOSI端口都是stm32向外输出,引脚设置成推挽输出没问题, 但是大家对MISO端口的设置就会产生疑惑了,MISO不是应该设置成为输入端口(GPIO_Mode_IN_FLOATING)才行的吗?
答题是肯定的,对于STM32的这一类管脚来说(如USART_RX)即可以设置成为输入模式,也可以设置成为复用的推挽输出。其工作都是正常的,不过建议大家还是设置成为输入端口的好,容易理解。
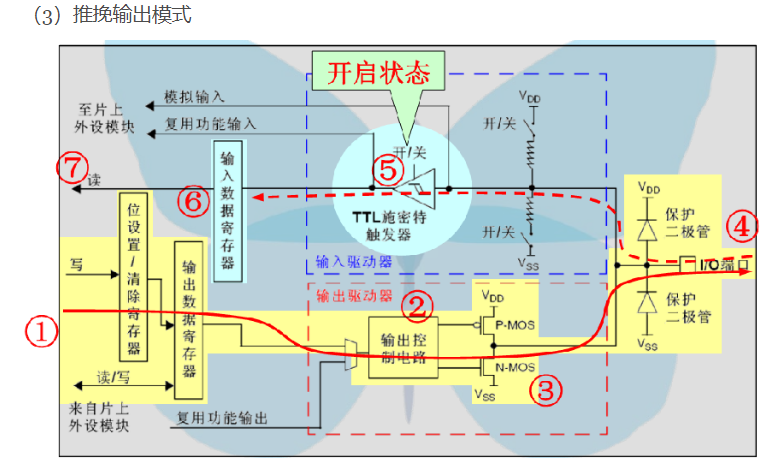
具体产生这一问题的原因是:从功能上来说,MISO应该配置为输入模式才对,但为什么也可以配置为GPIO_Mode_AF_PP?请看下面的GPIO复用功能配置框图。当一个GPIO端口配置为GPIO_Mode_AF_PP是,这个端口的内部结构框图如下:
图中可以看到,片上外设的复用功能输出信号会连接到输出控制电路,然后在端口上产生输出信号。但是在芯片内部,MISO是SPI模块的输入引脚,而不是输出引脚,也就是说图中的"复用功能输出信号"根本不存在(MISO不会产生输出信号),因此"输出控制电路"不能对外产生输出信号。
而另一方面看,即使在GPIO_Mode_AF_PP模式下,复用功能输入信号却与外部引脚之间相互连接,既MISO得到了外部信号的电平,实现了输入的功能(可以4-5-6-7路线输入数据,复用的情况下就是4-5-复用功能路线)。
FLASH介绍
控制 FLASH 的指令



定义 FLASH 指令编码表
1 //指令表
2 #define EN25X_WriteEnable 0x06
3 #define EN25X_WriteDisable 0x04
4 #define EN25X_ReadStatusReg 0x05
5 #define EN25X_WriteStatusReg 0x01
6 #define EN25X_ReadData 0x03
7 #define EN25X_FastReadData 0x0B
8 #define EN25X_FastReadDual 0x3B
9 #define EN25X_PageProgram 0x02
10 #define EN25X_BlockErase 0xD8
11 #define EN25X_SectorErase 0x20
12 #define EN25X_ChipErase 0xC7
13 #define EN25X_PowerDown 0xB9
14 #define EN25X_ReleasePowerDown 0xAB
15 #define EN25X_DeviceID 0xAB
16 #define EN25X_ManufactDeviceID 0x90
17 #define EN25X_JedecDeviceID 0x9F
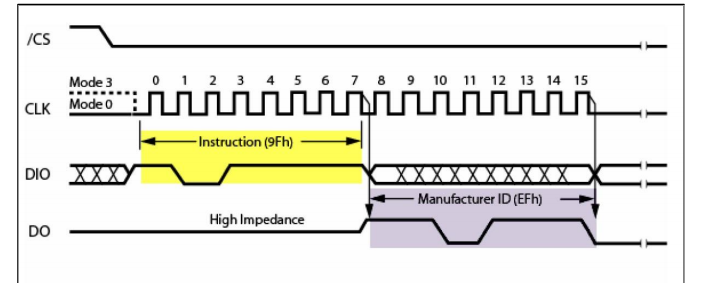
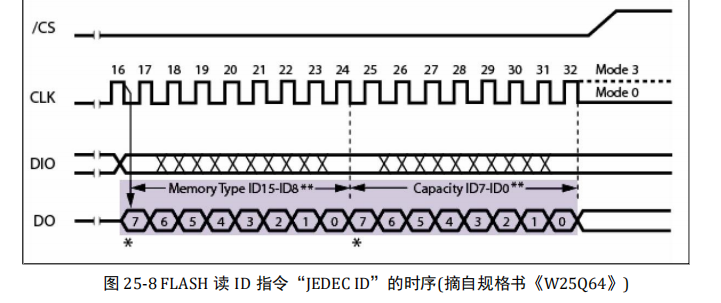
读取 FLASH 芯片 ID
1 //读取芯片ID
2 //返回值如下:
3 //0XEF13,表示芯片型号为EN25Q80
4 //0XEF14,表示芯片型号为EN25Q16
5 //0XEF15,表示芯片型号为EN25Q32
6 //0XEF16,表示芯片型号为EN25Q64
7 //0XEF17,表示芯片型号为EN25Q128
8 u16 EN25QXX_ReadID(void)
9 {
10 u16 Temp = 0;
11 EN25QXX_CS=0;
12 SPI2_ReadWriteByte(0x9F);//发送读取ID命令
13 SPI2_ReadWriteByte(0x00);
14 SPI2_ReadWriteByte(0x00);
15 SPI2_ReadWriteByte(0x00);
16 Temp|=SPI2_ReadWriteByte(0xFF)<<8;
17 Temp|=SPI2_ReadWriteByte(0xFF);
18 //EN25QXX_CS=1;
19 return Temp;
20 }
FLASH 写使能以及读取当前状态
1 //EN25QXX写使能
2 //将WEL置位
3 void EN25QXX_Write_Enable(void)
4 {
5 EN25QXX_CS=0; //使能器件
6 SPI2_ReadWriteByte(EN25X_WriteEnable); //发送写使能
7 EN25QXX_CS=1; //取消片选
8 }
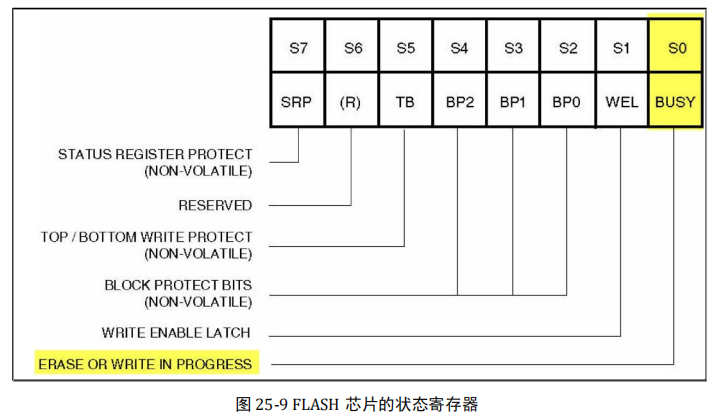
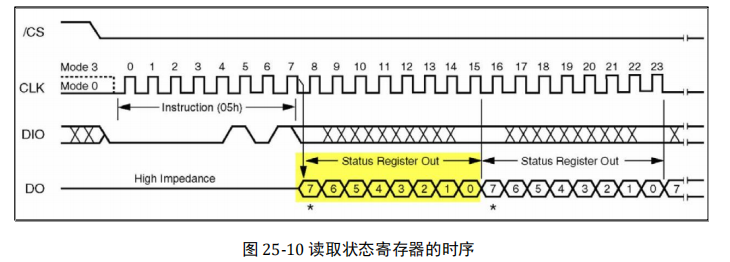
1 //读取EN25QXX的状态寄存器
2 //BIT7 6 5 4 3 2 1 0
3 //SPR RV TB BP2 BP1 BP0 WEL BUSY
4 //SPR:默认0,状态寄存器保护位,配合WP使用
5 //TB,BP2,BP1,BP0:FLASH区域写保护设置
6 //WEL:写使能锁定
7 //BUSY:忙标记位(1,忙;0,空闲)
8 //默认:0x00
9 u8 EN25QXX_ReadSR(void)
10 {
11 u8 byte=0;
12 EN25QXX_CS=0; //使能器件
13 SPI2_ReadWriteByte(EN25X_ReadStatusReg); //发送读取状态寄存器命令
14 byte=SPI2_ReadWriteByte(0Xff); //读取一个字节
15 EN25QXX_CS=1; //取消片选
16 return byte;
17 }
1 //等待空闲
2 void EN25QXX_Wait_Busy(void)
3 {
4 while((EN25QXX_ReadSR()&0x01)==0x01); // 等待BUSY位清空
5 }
FLASH 扇区擦除

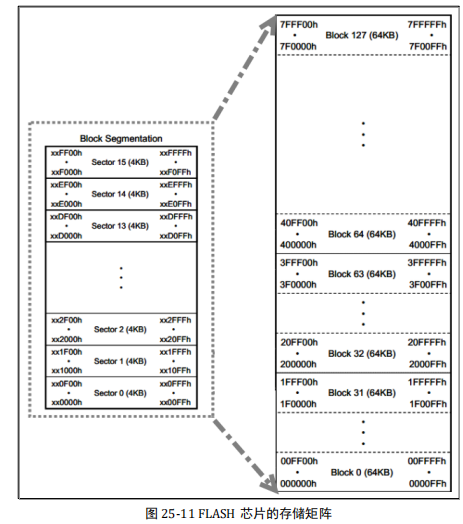
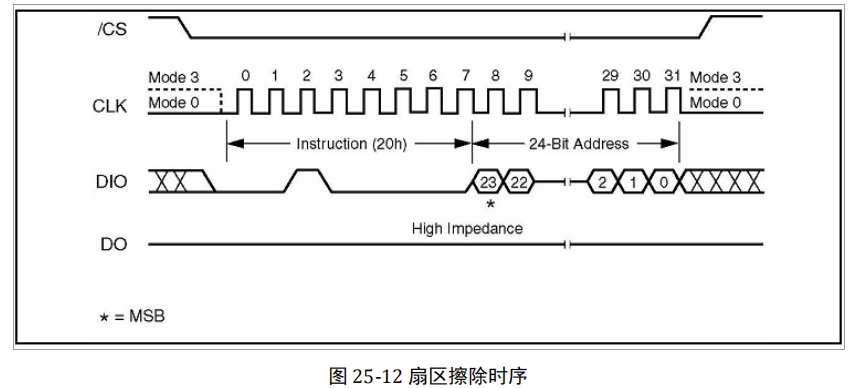
1 //擦除一个扇区
2 //Dst_Addr:扇区地址 根据实际容量设置
3 //擦除一个山区的最少时间:150ms
4 void EN25QXX_Erase_Sector(u32 Dst_Addr)
5 {
6 //监视falsh擦除情况,测试用
7 printf("fe:%x\r\n",Dst_Addr);
8 Dst_Addr*=4096;
9 EN25QXX_Write_Enable(); //SET WEL
10 EN25QXX_Wait_Busy();
11 EN25QXX_CS=0; //使能器件
12 SPI2_ReadWriteByte(EN25X_SectorErase); //发送扇区擦除指令
13 SPI2_ReadWriteByte((u8)((Dst_Addr)>>16)); //发送24bit地址
14 SPI2_ReadWriteByte((u8)((Dst_Addr)>>8));
15 SPI2_ReadWriteByte((u8)Dst_Addr);
16 EN25QXX_CS=1; //取消片选
17 EN25QXX_Wait_Busy(); //等待擦除完成
18 }
FLASH 的页写入
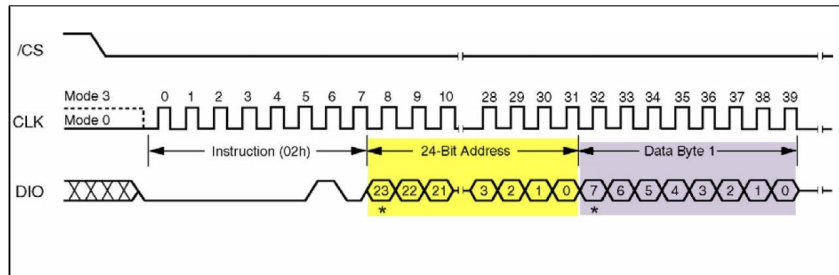
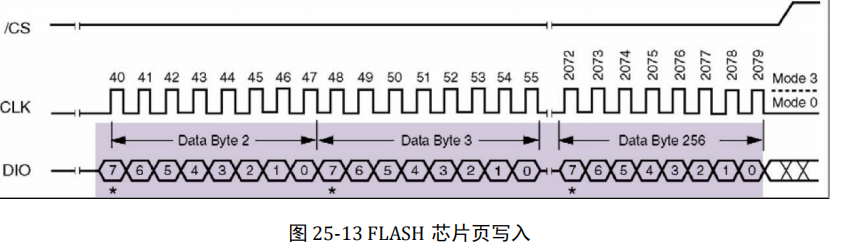
1 //写SPI FLASH
2 //在指定地址开始写入指定长度的数据
3 //该函数带擦除操作!
4 //pBuffer:数据存储区
5 //WriteAddr:开始写入的地址(24bit)
6 //NumByteToWrite:要写入的字节数(最大65535)
7 u8 EN25QXX_BUFFER[4096];
8 void EN25QXX_Write(u8* pBuffer,u32 WriteAddr,u16 NumByteToWrite)
9 {
10 u32 secpos;
11 u16 secoff;
12 u16 secremain;
13 u16 i;
14 u8 * EN25QXX_BUF;
15 EN25QXX_BUF=EN25QXX_BUFFER;
16 secpos=WriteAddr/4096;//扇区地址
17 secoff=WriteAddr%4096;//在扇区内的偏移
18 secremain=4096-secoff;//扇区剩余空间大小
19 //printf("ad:%X,nb:%X\r\n",WriteAddr,NumByteToWrite);//测试用
20 if(NumByteToWrite<=secremain)secremain=NumByteToWrite;//不大于4096个字节
21 while(1)
22 {
23 EN25QXX_Read(EN25QXX_BUF,secpos*4096,4096);//读出整个扇区的内容
24 for(i=0;i<secremain;i++)//校验数据
25 {
26 if(EN25QXX_BUF[secoff+i]!=0XFF)break;//需要擦除
27 }
28 if(i<secremain)//需要擦除
29 {
30 EN25QXX_Erase_Sector(secpos);//擦除这个扇区
31 for(i=0;i<secremain;i++) //复制
32 {
33 EN25QXX_BUF[i+secoff]=pBuffer[i];
34 }
35 EN25QXX_Write_NoCheck(EN25QXX_BUF,secpos*4096,4096);//写入整个扇区
36
37 }else EN25QXX_Write_NoCheck(pBuffer,WriteAddr,secremain);//写已经擦除了的,直接写入扇区剩余区间.
38 if(NumByteToWrite==secremain)break;//写入结束了
39 else//写入未结束
40 {
41 secpos++;//扇区地址增1
42 secoff=0;//偏移位置为0
43
44 pBuffer+=secremain; //指针偏移
45 WriteAddr+=secremain;//写地址偏移
46 NumByteToWrite-=secremain; //字节数递减
47 if(NumByteToWrite>4096)secremain=4096; //下一个扇区还是写不完
48 else secremain=NumByteToWrite; //下一个扇区可以写完了
49 }
50 }
51 }
从 FLASH 读取数据

1 //读取SPI FLASH
2 //在指定地址开始读取指定长度的数据
3 //pBuffer:数据存储区
4 //ReadAddr:开始读取的地址(24bit)
5 //NumByteToRead:要读取的字节数(最大65535)
6 void EN25QXX_Read(u8* pBuffer,u32 ReadAddr,u16 NumByteToRead)
7 {
8 u16 i;
9 EN25QXX_CS=0; //使能器件
10 SPI2_ReadWriteByte(EN25X_ReadData); //发送读取命令
11 SPI2_ReadWriteByte((u8)((ReadAddr)>>16)); //发送24bit地址
12 SPI2_ReadWriteByte((u8)((ReadAddr)>>8));
13 SPI2_ReadWriteByte((u8)ReadAddr);
14 for(i=0;i<NumByteToRead;i++)
15 {
16 pBuffer[i]=SPI2_ReadWriteByte(0XFF); //循环读数
17 }
18 EN25QXX_CS=1;
19 }
3. main 函数
1 #include "system.h"
2 #include "SysTick.h"
3 #include "led.h"
4 #include "usart.h"
5 #include "tftlcd.h"
6 #include "key.h"
7 #include "spi.h"
8 #include "flash.h"
9
10
11 //要写入到25Q64的字符串数组
12 const u8 text_buf[]="www.prechin.net";
13 #define TEXT_LEN sizeof(text_buf)
14 //u16 key3;
15
16 int main()
17 {
18 u8 i=0;
19 u8 key;
20 u8 buf[30];
21
22 SysTick_Init(72);
23 NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //中断优先级分组 分2组
24 LED_Init();
25 USART1_Init(9600);
26 TFTLCD_Init(); //LCD初始化
27 KEY_Init();
28 EN25QXX_Init();
29
30 FRONT_COLOR=BLACK;
31 LCD_ShowString(10,10,tftlcd_data.width,tftlcd_data.height,16,"PRECHIN STM32F1");
32 LCD_ShowString(10,30,tftlcd_data.width,tftlcd_data.height,16,"www.prechin.net");
33 LCD_ShowString(10,50,tftlcd_data.width,tftlcd_data.height,16,"FLASH-SPI Test");
34 LCD_ShowString(10,70,tftlcd_data.width,tftlcd_data.height,16,"K_UP:Write K_DOWN:Read");
35 FRONT_COLOR=RED;
36
37 while(EN25QXX_ReadID()!=EN25Q64) //检测不到EN25Q64
38 //while(1)
39 {
40 //key3 = EN25QXX_ReadID();
41 printf("EN25Q64 Check Failed! \r\n");
42 LCD_ShowString(10,150,tftlcd_data.width,tftlcd_data.height,16,"EN25Q64 Check Failed! ");
43 }
44 printf("EN25Q64 Check Success!\r\n");
45 LCD_ShowString(10,150,tftlcd_data.width,tftlcd_data.height,16,"EN25Q64 Check Success!");
46
47 LCD_ShowString(10,170,tftlcd_data.width,tftlcd_data.height,16,"Write Data:");
48 LCD_ShowString(10,190,tftlcd_data.width,tftlcd_data.height,16,"Read Data :");
49
50 while(1)
51 {
52 key=KEY_Scan(0);
53 if(key==KEY_UP)
54 {
55 EN25QXX_Write((u8 *)text_buf,0,TEXT_LEN);
56 printf("发送的数据:%s\r\n",text_buf);
57 LCD_ShowString(10+11*8,170,tftlcd_data.width,tftlcd_data.height,16,"www.prechin.net");
58 }
59 if(key==KEY_DOWN)
60 {
61 EN25QXX_Read(buf,0,TEXT_LEN);
62 printf("接收的数据:%s\r\n",buf);
63 LCD_ShowString(10+11*8,190,tftlcd_data.width,tftlcd_data.height,16,buf);
64 }
65
66 i++;
67 if(i%20==0)
68 {
69 led1=!led1;
70 }
71
72 delay_ms(10);
73
74 }
75 }
1 //无检验写SPI FLASH
2 //必须确保所写的地址范围内的数据全部为0XFF,否则在非0XFF处写入的数据将失败!
3 //具有自动换页功能
4 //在指定地址开始写入指定长度的数据,但是要确保地址不越界!
5 //pBuffer:数据存储区
6 //WriteAddr:开始写入的地址(24bit)
7 //NumByteToWrite:要写入的字节数(最大65535)
8 //CHECK OK
9 void EN25QXX_Write_NoCheck(u8* pBuffer,u32 WriteAddr,u16 NumByteToWrite)
10 {
11 u16 pageremain;
12 pageremain=256-WriteAddr%256; //单页剩余的字节数
13 if(NumByteToWrite<=pageremain)pageremain=NumByteToWrite;//不大于256个字节
14 while(1)
15 {
16 EN25QXX_Write_Page(pBuffer,WriteAddr,pageremain);
17 if(NumByteToWrite==pageremain)break;//写入结束了
18 else //NumByteToWrite>pageremain
19 {
20 pBuffer+=pageremain;
21 WriteAddr+=pageremain;
22
23 NumByteToWrite-=pageremain; //减去已经写入了的字节数
24 if(NumByteToWrite>256)pageremain=256; //一次可以写入256个字节
25 else pageremain=NumByteToWrite; //不够256个字节了
26 }
27 }
28 }
1 #ifndef _flash_H
2 #define _flash_H
3
4 #include "system.h"
5
6
7 //EN25X系列/Q系列芯片列表
8 //EN25Q80 ID 0XEF13
9 //EN25Q16 ID 0XEF14
10 //EN25Q32 ID 0XEF15
11 //EN25Q64 ID 0XEF16
12 //EN25Q128 ID 0XEF17
13 #define EN25Q80 0XEF13
14 #define EN25Q16 0XEF14
15 #define EN25Q32 0XEF15
16 //#define EN25Q64 0XEF16
17 //#define EN25Q128 0XEF17
18 //#define EN25Q64 0XC816
19 //#define EN25Q64 0X1C16 //GD25QXX
20 //#define EN25Q64 0X2016 //XM25QHXX
21 #define EN25Q64 0Xb16 //MXIC C216
22 #define EN25Q128 0XC817
23
24 extern u16 EN25QXX_TYPE; //定义EN25QXX芯片型号
25
26 #define EN25QXX_CS PGout(13) //EN25QXX的片选信号
27
28
29 //指令表
30 #define EN25X_WriteEnable 0x06
31 #define EN25X_WriteDisable 0x04
32 #define EN25X_ReadStatusReg 0x05
33 #define EN25X_WriteStatusReg 0x01
34 #define EN25X_ReadData 0x03
35 #define EN25X_FastReadData 0x0B
36 #define EN25X_FastReadDual 0x3B
37 #define EN25X_PageProgram 0x02
38 #define EN25X_BlockErase 0xD8
39 #define EN25X_SectorErase 0x20
40 #define EN25X_ChipErase 0xC7
41 #define EN25X_PowerDown 0xB9
42 #define EN25X_ReleasePowerDown 0xAB
43 #define EN25X_DeviceID 0xAB
44 #define EN25X_ManufactDeviceID 0x90
45 #define EN25X_JedecDeviceID 0x9F
46
47 void EN25QXX_Init(void);
48 u16 EN25QXX_ReadID(void); //读取FLASH ID
49 u8 EN25QXX_ReadSR(void); //读取状态寄存器
50 void EN25QXX_Write_SR(u8 sr); //写状态寄存器
51 void EN25QXX_Write_Enable(void); //写使能
52 void EN25QXX_Write_Disable(void); //写保护
53 void EN25QXX_Write_NoCheck(u8* pBuffer,u32 WriteAddr,u16 NumByteToWrite);
54 void EN25QXX_Read(u8* pBuffer,u32 ReadAddr,u16 NumByteToRead); //读取flash
55 void EN25QXX_Write(u8* pBuffer,u32 WriteAddr,u16 NumByteToWrite);//写入flash
56 void EN25QXX_Erase_Chip(void); //整片擦除
57 void EN25QXX_Erase_Sector(u32 Dst_Addr); //扇区擦除
58 void EN25QXX_Wait_Busy(void); //等待空闲
59 void EN25QXX_PowerDown(void); //进入掉电模式
60 void EN25QXX_WAKEUP(void); //唤醒
61
62
63 #endif
(stm32学习总结)—SPI-FLASH 实验的更多相关文章
- stm32学习总结)—SPI-FLASH 实验 _
SPI总线 SPI 简介 SPI 的全称是"Serial Peripheral Interface",意为串行外围接口,是Motorola 首先在其 MC68HCXX 系列处理器上 ...
- STM32学习笔记——SPI串行通讯(向原子哥学习)
一.SPI 简介 SPI是 Serial Peripheral interface 的缩写,就是串行外围设备接口.SPI 接口主要应用在 EEPROM, FLASH,实时时钟,AD 转换器,还有数 ...
- STM32学习笔记(八) SPI总线(操作外部flash)
1. SPI总线简介 SPI全称串行外设接口,是一种高速,全双工,同步的外设总线:它工作在主从方式,常规需要至少4根线才能够正常工作.SPI作为基本的外设接口,在FLASH,EPPROM和一些数字通讯 ...
- 【iCore、iCore2 双核心板】EPCS 实验(SPI Flash)(基于Verilog语言)
_____________________________________ 深入交流QQ群: A: 204255896(1000人超级群,可加入) B: 165201798(500人超级群,满员) C ...
- STM32学习笔记——OLED屏
STM32学习笔记--OLED屏 OLED屏的特点: 1. 模块有单色和双色可选,单色为纯蓝色,双色为黄蓝双色(本人选用双色): 2. 显示尺寸为0.96寸 3. 分辨率为128*64 4. ...
- Jlink使用技巧之烧写SPI Flash存储芯片
前言 大多数玩单片机的人都知道Jlink可以烧写Hex文件,作为ARM仿真调试器,但是知道能烧写SPI Flash的人应该不多,本篇文章将介绍如何使用JLink来烧写或者读取SPI Flash存储器, ...
- OpenRisc-32-ORPSoC烧写外部spi flash
引言 经过前面的分析和介绍,我们对ORPSoC的启动过程(http://blog.csdn.net/rill_zhen/article/details/8855743)和 ORpSoC的debug子系 ...
- (电工基地笔记)Vivado固化至SPI Flash
如果从头开始做SPI Flash固化是有一些麻烦的,要在完成综合之后,打开 synthesized Design (图) (图) 然后在synthesized Design打开状态下,选择Tools- ...
- Nand Flash,Nor Flash,CFI Flash,SPI Flash 之间的关系
前言: 在嵌入式开发中,如uboot的移植,kernel的移植都需要对Flash 有基本的了解.下面细说一下标题中的中Flash中的关系 一,Flash的内存存储结构 flash按照内部存 ...
随机推荐
- Weblogic补丁升级常见问题
转至:https://blog.csdn.net/weixin_44659716/article/details/106804177 常用企业级版本:Weblogic 11g(weblogic10.3 ...
- linux多进/线程编程(4)——进程间通信之pipe和fifo
前言: Linux环境下,进程地址空间相互独立,每个进程各自有不同的用户地址空间.任何一个进程的全局变量在另一个进程中都看不到,所以进程和进程之间不能相互访问,要交换数据必须通过内核,在内核中开辟一块 ...
- (第三章)TF框架之实现验证码识别
这里实现一个用神经网络(卷积神经网络也可以)实现验证码识别的小案例,主要记录本人做这个案例的流程,不会像之前那么详细,主要用作个人记录用... 这里是验证码的四个字母,被one-hot编码后形成的四个 ...
- (第一章第六部分)TensorFlow框架之实现线性回归小案例
系列博客链接: (一)TensorFlow框架介绍:https://www.cnblogs.com/kongweisi/p/11038395.html (二)TensorFlow框架之图与Tensor ...
- MySql的事务及数据的导入导出
Mysql的事务及应用 1.补充数据库的导入与导出 导入 mysql -u root -p database < E:/SS/Test.sql -- 即执行sql文件 导出 -- 结构+数据 m ...
- Typora笔记上传到博客
Typora笔记上传到博客 Markdown是一种轻量级标记语言,排版语法简洁,让人们更多地关注内容本身而非排版.它使用易读易写的纯文本格式编写文档,可与HTML混编,可导出 HTML.PDF 以及本 ...
- 『德不孤』Pytest框架 — 13、Pytest中Fixture装饰器(三)
目录 9.ids参数说明 10.name参数说明 11.scope参数说明 (1)scope="function" (2)scope="class" (3)sc ...
- layui 数据表格的使用(分页+总条数)
下载地址 https://www.layui.com/ 点击实例,找到layui适合模板 2. 新建html将代码复制到对应模板,修改对应样式路径. 5.修改对应参数(url,field) 追加以下参 ...
- JS-购物车
<!DOCTYPE html> <html lang="en"> <head> <meta charset="UTF-8&quo ...
- 【基础】工作中常用的linux命令,经常会被面试官问到
前言 面试经常会问到一些Linux操作命令,下面就工作中常用的和面试问的频率较高的命令做详细描述. 常用命令 修改密码:passwd 用户名 切换用户名:su 用户名 查看当前路径:pwd 调整路径: ...