python进阶:带你学习实时目标跟踪
摘要:本程序主要实现了python的opencv人工智能视觉模块的目标跟踪功能。
本文分享自华为云社区《python进阶——人工智能实时目标跟踪,这一篇就够用了!》,作者:lqj_本人 。
前言
本程序主要实现了python的opencv人工智能视觉模块的目标跟踪功能。
项目介绍
区域性锁定目标实时动态跟踪(适用 警方追捕,无人机锁定拍摄等)
首先先介绍几种AI视觉算法
特性:
1.BOOSTING:算法原理类似于Harr cascdes(AdaBoost),是一种很老的算法。这个算法速度慢并且不准。
2.MIL:比BOOSTING准一点
3.KCF:速度比BOOSTING和MIL更快,与BOOSTING和MIL一样不能很好的处理遮挡问题。
4.CSRT:比KCF更准一些,但是速度比KCF慢
5.MedianFlow:对于快速移动的目标和外形比那花迅速的目标效果不好
6.TLD:会产生朵的false-posittives
7.MOSSE:算法速度非常快,但是准确率比不上KCF和CSRT,在一些追求算法的速度场合很适用
8.GOTURN:OpenCV中自带的唯一一个基于深度学习的算法,运行短发需要提前下载好模型文件
分别对应的伴生的函数:
kcf:cv2.legacy.TrackerKCF_create
csrt:cv2.legacy.TrackerCSRT_create
boosting:cv2.legacy.TrackerBoosting_create
mil:cv2.legacy.TrackerMIL_create
tld:cv2.legacy.TrackerTLD_create
medianflow:cv2.legacy.TrackerMedianFlow_create
mosse:cv2.legacy.TrackerMOSSE_create
详细代码讲解
导入cv模块
ret,frame = cap.read()
import cv2
使用csrt算法,引用伴生函数,并赋值给tracker
tracker = cv2.legacy.TrackerCSRT_create()
读取视频流
cap = cv2.VideoCapture('11.mp4')
先读取到第一帧
ret,frame = cap.read()
使用selectROI(前景),画框将目标框起,并赋值给bbox
bbox = cv2.selectROI('A',frame,fromCenter=False,showCrosshair=True)
初始化tracker,将上面的两个值传入
tracker.init(frame,bbox)
读取每一帧
ret,frame = cap.read()
根据每一帧来更新tracker
ok,box = tracker.update(frame)
若读取成功,就定位画框,并跟随
if ok :
(x,y,w,h) = [int(v) for v in box]
cv2.rectangle(frame,pt1=(int(x),int(y)),pt2=(int(x)+int(w),int(y)+int(h)),color=(0,255,0),thickness=2)
显示视频流
cv2.imshow('A', frame)
等待50毫秒或按空格键退出
if cv2.waitKey(50) == ord(' '):
break
释放视频流和释放窗口
cap.release()
cv2.destroyAllWindows()
完整代码及注释:
import cv2
tracker = cv2.legacy.TrackerCSRT_create()#使用csrt算法,引用伴生函数,并赋值给tracker cap = cv2.VideoCapture('11.mp4')#读取视频流 ret,frame = cap.read()#先读取第一帧 bbox = cv2.selectROI('A',frame,fromCenter=False,showCrosshair=True)#使用selectROI(前景),画框将目标框起,并赋值给bbox tracker.init(frame,bbox)#初始化tracker,将上面的两个值传入 while True:
ret,frame = cap.read()#读取每一帧 ok,box = tracker.update(frame)#根据每一帧来跟新tracker # 若读取成功,我们就定位画框,并跟随
if ok :
(x,y,w,h) = [int(v) for v in box]
cv2.rectangle(frame,pt1=(int(x),int(y)),pt2=(int(x)+int(w),int(y)+int(h)),color=(0,255,0),thickness=2) cv2.imshow('A', frame)#显示视频流 if cv2.waitKey(50) == ord(' '):#等待50毫秒或键盘按空格键退出
break # 释放视频流,释放窗口
cap.release()
cv2.destroyAllWindows()
结果演示
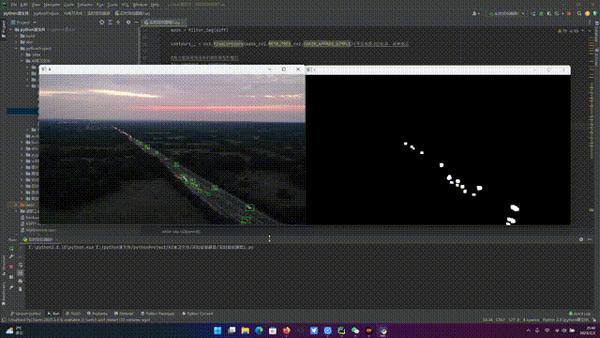
区域性全部实时动态目标跟踪(适用夜视跟踪,范围性观察等)
思路构建
1.先将实时摄像流或录制视频流,灰度转化并高斯模糊
2.用二值化算法将流中的物体轮廓扩充
3.分别先读到第一帧和第二帧,让其对比
4.寻找对比后,流的轮廓位置,并开启简易模式
5.过滤物体的矩阵轮廓将其定位绘出
详细代码讲解
导入cv模块
import cv2
将视频流转换并让其高斯模糊
gray = cv2.cvtColor(frame,cv2.COLOR_BGR2GRAY)
blur = cv2.GaussianBlur(gray,(5,5),0)
二值化扩充
_,thresh = cv2.threshold(blur,20,255,cv2.THRESH_BINARY)
dilated = cv2.dilate(thresh,None,iterations=3)
return dilated
读取视频流或实时摄像流
cap = cv2.VideoCapture('11.mp4')
读取第一帧
ret,frame1 = cap.read()
读取第二帧
ret,frame2 = cap.read()
判断cap是否为打开状态
while cap.isOpened():
若为打开,则第一帧与第二帧比较
diff = cv2.absdiff(frame1,frame2)
mask = filter_img(diff)
寻找比较后的物体轮廓,并开启简易模式
contours,_ = cv2.findContours(mask,cv2.RETR_TREE,cv2.CHAIN_APPROX_SIMPLE)
使用方框将视频流中的物体框出,得到矩阵的宽高
(x,y,w,h) = cv2.boundingRect(contour)
若矩阵的面积小于10(根据视频流中物体的大小来定义),直接无视
if cv2.contourArea(contour) < 10:
将过滤的物体的矩阵轮廓绘出(一定要用int整形)
cv2.rectangle(frame1,pt1=(int(x),int(y)),pt2=(int(x)+int(w),int(y)+int(h)),color=(0,255,0),thickness=1)
将第一帧显示
cv2.imshow('A',frame1)
将上面赋值的mask显示
cv2.imshow('B',mask)
实现前后帧对比,并定位物体运动轨迹
1.将第二帧赋值给第一帧
frame1 = frame2
2.再将cap读到的赋值给第二帧()
ret,frame2 = cap.read()
等待50毫秒或者按空格结束
if cv2.waitKey(50) == ord(' '):
break
释放视频流及释放窗口
cap.release()
cv2.destroyAllWindows()
完整代码及注释:
import cv2
def filter_img(frame):
#将视频流转换灰度并让其高斯模糊
gray = cv2.cvtColor(frame,cv2.COLOR_BGR2GRAY)
blur = cv2.GaussianBlur(gray,(5,5),0)
#二值化将其扩充
_,thresh = cv2.threshold(blur,20,255,cv2.THRESH_BINARY)
dilated = cv2.dilate(thresh,None,iterations=3)
return dilated
# 读取视频流
cap = cv2.VideoCapture('11.mp4') ret,frame1 = cap.read()#读到第一帧
ret,frame2 = cap.read()#读到第二帧 while cap.isOpened():#判断cap是否打开
diff = cv2.absdiff(frame1,frame2)#若打开,则第一帧和第二帧作比较 mask = filter_img(diff) contours,_ = cv2.findContours(mask,cv2.RETR_TREE,cv2.CHAIN_APPROX_SIMPLE)#寻找视频流的轮廓,简单模式 #用方框将视频流中的物体用矩形框出
for contour in contours:
(x,y,w,h) = cv2.boundingRect(contour)#得到矩阵的宽高
if cv2.contourArea(contour) < 10:#若矩阵的面积小于200,就无视(太小了)
continue
cv2.rectangle(frame1,pt1=(int(x),int(y)),pt2=(int(x)+int(w),int(y)+int(h)),color=(0,255,0),thickness=1)#将过滤的物体的矩阵轮廓绘出 # cv2.drawContours(frame1,contours,-1,(0,255,0),2)#将视频流中的物体轮廓画出 cv2.imshow('A',frame1)#将第一帧显示
cv2.imshow('B',mask)#将mask也显示 frame1 = frame2#将第二帧赋值给第一帧
ret,frame2 = cap.read()#再将cap读到的赋值给第二帧 if cv2.waitKey(50) == ord(' '):#等待五十毫秒或者按空格结束
break
#销毁cap流
cap.release()
#释放窗口
cv2.destroyAllWindows()
结果显示
python进阶:带你学习实时目标跟踪的更多相关文章
- Video Target Tracking Based on Online Learning—深度学习在目标跟踪中的应用
摘要 近年来,深度学习方法在物体跟踪领域有不少成功应用,并逐渐在性能上超越传统方法.本文先对现有基于深度学习的目标跟踪算法进行了分类梳理,后续会分篇对各个算法进行详细描述. 看上方给出的3张图片,它们 ...
- [OpenCV实战]15 基于深度学习的目标跟踪算法GOTURN
目录 1 什么是对象跟踪和GOTURN 2 在OpenCV中使用GOTURN 3 GOTURN优缺点 4 参考 在这篇文章中,我们将学习一种基于深度学习的目标跟踪算法GOTURN.GOTURN在Caf ...
- 开源项目(9-0)综述--基于深度学习的目标跟踪sort与deep-sort
基于深度学习的目标跟踪sort与deep-sort https://github.com/Ewenwan/MVision/tree/master/3D_Object_Detection/Object_ ...
- 干货 | Python进阶系列之学习笔记(二)
目录 对象 字符串 一.对象 (1)什么是对象 在python中一切都是对象,每个对象都有三个属性分别是,(id)身份,就是在内存中的地址,类型(type),是int.字符.字典(dic).列表(li ...
- 慕课网python进阶函数式编程学习记录
函数 不等于 函数式 函数: function 函数式: functional,一种编程范式 就好比计算机 不等于 计算 c语言: 函数 python :函数式(计算) 函数式编程特点: 把计算视为函 ...
- 干货 | Python进阶系列之学习笔记(四)
目录 Python条件判断 Python循环语句 Python循环控制 迭代器与生成器 异常 一.Python 条件判断 如果某些条件满足,才能做某件事情:条件不满足时,则不能做,这就是所谓的判断. ...
- Video Target Tracking Based on Online Learning—TLD单目标跟踪算法详解
视频目标跟踪问题分析 视频跟踪技术的主要目的是从复杂多变的的背景环境中准确提取相关的目标特征,准确地识别出跟踪目标,并且对目标的位置和姿态等信息精确地定位,为后续目标物体行为分析提供足 ...
- python进阶强化学习
最近学习了慕课的python进阶强化训练,将学习的内容记录到这里,同时也增加了很多相关知识. 主要分为以下九个模块: 基本使用 迭代器和生成器 字符串 文件IO操作 自定义类和类的继承 函数装饰器和类 ...
- python进阶学习笔记(一)
python进阶部分要学习的内容: 学习目标: 1.函数式编程 1.1,什么是函数式编程 函数式编程是一种抽象计算的编程模式 不同语言的抽象层次不同: 函数式编程的特点: python支持的函数式编程 ...
- paip.性能跟踪profile原理与架构与本质-- python扫带java php
paip.性能跟踪profile原理与架构与本质-- python扫带java php ##背景 弄个个输入法音标转换atiEnPH工具,老是python性能不的上K,7k记录浏览过k要30分钟了. ...
随机推荐
- HCIP-进阶实验02-ISIS协议部署
进阶实验02-ISIS协议部署 1 实验需求 设备 接口 IP地址 备注 R1 G0/0/0 10.1.123.1/24 R2 G0/0/0 10.1.123.2/24 G0/0/1 10.1.24. ...
- 使用Wireshark完成实验2-TCP
1.打开Google Chorme,进入https://gaia.cs.umass.edu/wireshark-labs/alice.txt 2.将文本保存,进入https://gaia.cs.uma ...
- pandas、matplotlib常用命令(收集整理)
1 import matplotlib.pyplot as plt 2 import pandas as pd 3 import matplotlib as mpl 含有中文无法正常显示,需增加如下代 ...
- Linux(CentOS7)中安装Docker
Linux(CentOS7)中安装Docker 什么是Docker? Docker是一个开源项目, 诞生于2013年初,最初是dotCloud公司内部的一个业余项目.它基于Google公司推出的Go语 ...
- 微服务注册到Nacos上的Ip错误,是内网ip不是公网ip
spring.cloud.nacos.discovery.ip = 本机公网IP spring.cloud.nacos.discovery.port = 服务端口
- c++ 在项目中创建DLL,并调用
创建DLL分为两种方法,先介绍第一种 一.创建DLL (1) // dll.h #pragma once //dll.h #ifndef DLL_H_ #define DLL_H_ void prin ...
- PLC入门笔记11
1.开关? 输入 拨杆开关.点动开关.常开.常闭开关 霍尔接近开关(磁场 N极导通 3线+-DC24V ).电容接近开关(非金属).电感接近开关(金属) 2.输入接线? NPN型,不需要外接电源,直接 ...
- Qt打印不同颜色
qCritical()<<"\033[47;31m"<<"打印的字符串"<<"\033[m"; \033 ...
- 记 第一次linux下简易部署 django uwsgi nginx
1.首先确定django项目是跑起来的 2.装nginx uwsgi ,网上教程一大堆 3.uwsgi的配置了 我是通过ini启动的 随意找个顺手的文件夹创建uwsgi.ini文件 我是在/home ...
- jsp第4个作业(2)
<%@ page language="java" import="java.util.*" pageEncoding="utf-8"% ...