浅谈压缩感知(二十三):压缩感知重构算法之压缩采样匹配追踪(CoSaMP)
主要内容:
- CoSaMP的算法流程
- CoSaMP的MATLAB实现
- 一维信号的实验与结果
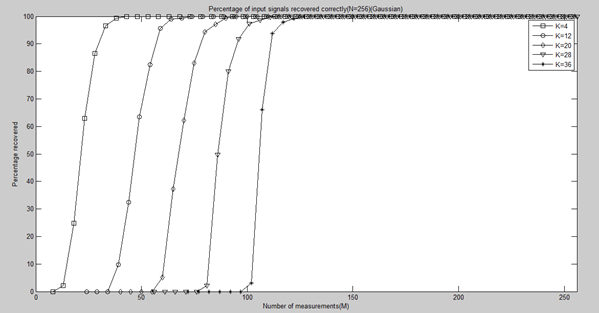
- 测量数M与重构成功概率关系的实验与结果
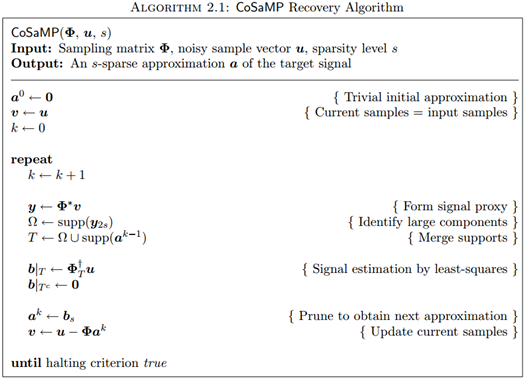
一、CoSaMP的算法流程
压缩采样匹配追踪(CompressiveSampling MP)是D. Needell继ROMP之后提出的又一个具有较大影响力的重构算法。CoSaMP也是对OMP的一种改进,每次迭代选择多个原子,除了原子的选择标准之外,它有一点不同于ROMP:ROMP每次迭代已经选择的原子会一直保留,而CoSaMP每次迭代选择的原子在下次迭代中可能会被抛弃。
二、CS_CoSaMP的MATLAB实现(CS_CoSaMP.m)
function [ theta ] = CS_CoSaMP( y,A,K )
% CS_CoSaOMP
% Detailed explanation goes here
% y = Phi * x
% x = Psi * theta
% y = Phi*Psi * theta
% 令 A = Phi*Psi, 则y=A*theta
% K is the sparsity level
% 现在已知y和A,求theta
% Reference:Needell D,Tropp J A.CoSaMP:Iterative signal recovery from
% incomplete and inaccurate samples[J].Applied and Computation Harmonic
% Analysis,,:-.
[m,n] = size(y);
if m<n
y = y'; %y should be a column vector
end
[M,N] = size(A); %传感矩阵A为M*N矩阵
theta = zeros(N,); %用来存储恢复的theta(列向量)
pos_num = []; %用来迭代过程中存储A被选择的列序号
res = y; %初始化残差(residual)为y
for kk=:K %最多迭代K次
%() Identification
product = A'*res; %传感矩阵A各列与残差的内积
[val,pos]=sort(abs(product),'descend');
Js = pos(:*K); %选出内积值最大的2K列
%() Support Merger
Is = union(pos_num,Js); %Pos_theta与Js并集
%() Estimation
%At的行数要大于列数,此为最小二乘的基础(列线性无关)
if length(Is)<=M
At = A(:,Is); %将A的这几列组成矩阵At
else %At的列数大于行数,列必为线性相关的,At'*At将不可逆
if kk ==
theta_ls = ;
end
break; %跳出for循环
end
%y=At*theta,以下求theta的最小二乘解(Least Square)
theta_ls = (At'*At)^(-1)*At'*y; %最小二乘解
%() Pruning
[val,pos]=sort(abs(theta_ls),'descend');
%() Sample Update
pos_num = Is(pos(:K));
theta_ls = theta_ls(pos(:K));
%At(:,pos(:K))*theta_ls是y在At(:,pos(:K))列空间上的正交投影
res = y - At(:,pos(:K))*theta_ls; %更新残差
if norm(res)<1e- %Repeat the steps until r=
break; %跳出for循环
end
end
theta(pos_num)=theta_ls; %恢复出的theta
end
三、一维信号的实验与结果
%压缩感知重构算法测试
clear all;close all;clc;
M = ; %观测值个数
N = ; %信号x的长度
K = ; %信号x的稀疏度
Index_K = randperm(N);
x = zeros(N,);
x(Index_K(:K)) = *randn(K,); %x为K稀疏的,且位置是随机的
Psi = eye(N); %x本身是稀疏的,定义稀疏矩阵为单位阵x=Psi*theta
Phi = randn(M,N); %测量矩阵为高斯矩阵
A = Phi * Psi; %传感矩阵
y = Phi * x; %得到观测向量y %% 恢复重构信号x
tic
theta = CS_CoSaMP( y,A,K );
x_r = Psi * theta; % x=Psi * theta
toc %% 绘图
figure;
plot(x_r,'k.-'); %绘出x的恢复信号
hold on;
plot(x,'r'); %绘出原信号x
hold off;
legend('Recovery','Original')
fprintf('\n恢复残差:');
norm(x_r-x) %恢复残差

四、测量数M与重构成功概率关系的实验与结果
clear all;close all;clc; %% 参数配置初始化
CNT = ; %对于每组(K,M,N),重复迭代次数
N = ; %信号x的长度
Psi = eye(N); %x本身是稀疏的,定义稀疏矩阵为单位阵x=Psi*theta
K_set = [,,,,]; %信号x的稀疏度集合
Percentage = zeros(length(K_set),N); %存储恢复成功概率 %% 主循环,遍历每组(K,M,N)
tic
for kk = :length(K_set)
K = K_set(kk); %本次稀疏度
M_set = *K::N; %M没必要全部遍历,每隔5测试一个就可以了
PercentageK = zeros(,length(M_set)); %存储此稀疏度K下不同M的恢复成功概率
for mm = :length(M_set)
M = M_set(mm); %本次观测值个数
fprintf('K=%d,M=%d\n',K,M);
P = ;
for cnt = :CNT %每个观测值个数均运行CNT次
Index_K = randperm(N);
x = zeros(N,);
x(Index_K(:K)) = *randn(K,); %x为K稀疏的,且位置是随机的
Phi = randn(M,N)/sqrt(M); %测量矩阵为高斯矩阵
A = Phi * Psi; %传感矩阵
y = Phi * x; %得到观测向量y
theta = CS_CoSaMP(y,A,K); %恢复重构信号theta
x_r = Psi * theta; % x=Psi * theta
if norm(x_r-x)<1e- %如果残差小于1e-6则认为恢复成功
P = P + ;
end
end
PercentageK(mm) = P/CNT*; %计算恢复概率
end
Percentage(kk,:length(M_set)) = PercentageK;
end
toc
save CoSaMPMtoPercentage1000 %运行一次不容易,把变量全部存储下来 %% 绘图
S = ['-ks';'-ko';'-kd';'-kv';'-k*'];
figure;
for kk = :length(K_set)
K = K_set(kk);
M_set = *K::N;
L_Mset = length(M_set);
plot(M_set,Percentage(kk,:L_Mset),S(kk,:));%绘出x的恢复信号
hold on;
end
hold off;
xlim([ ]);
legend('K=4','K=12','K=20','K=28','K=36');
xlabel('Number of measurements(M)');
ylabel('Percentage recovered');
title('Percentage of input signals recovered correctly(N=256)(Gaussian)');
五、参考文章
http://blog.csdn.net/jbb0523/article/details/45441361
浅谈压缩感知(二十三):压缩感知重构算法之压缩采样匹配追踪(CoSaMP)的更多相关文章
- [转]压缩感知重构算法之分段正交匹配追踪(StOMP)
分段正交匹配追踪(StagewiseOMP)或者翻译为逐步正交匹配追踪,它是OMP另一种改进算法,每次迭代可以选择多个原子.此算法的输入参数中没有信号稀疏度K,因此相比于ROMP及CoSaMP有独到的 ...
- 浅谈压缩感知(二十八):压缩感知重构算法之广义正交匹配追踪(gOMP)
主要内容: gOMP的算法流程 gOMP的MATLAB实现 一维信号的实验与结果 稀疏度K与重构成功概率关系的实验与结果 一.gOMP的算法流程 广义正交匹配追踪(Generalized OMP, g ...
- 浅谈压缩感知(二十五):压缩感知重构算法之分段正交匹配追踪(StOMP)
主要内容: StOMP的算法流程 StOMP的MATLAB实现 一维信号的实验与结果 门限参数Ts.测量数M与重构成功概率关系的实验与结果 一.StOMP的算法流程 分段正交匹配追踪(Stagewis ...
- 浅谈压缩感知(二十二):压缩感知重构算法之正则化正交匹配追踪(ROMP)
主要内容: ROMP的算法流程 ROMP的MATLAB实现 一维信号的实验与结果 测量数M与重构成功概率关系的实验与结果 一.ROMP的算法流程 正则化正交匹配追踪ROMP算法流程与OMP的最大不同之 ...
- 压缩感知重构算法之压缩采样匹配追踪(CoSaMP)
压缩采样匹配追踪(CompressiveSampling MP)是D. Needell继ROMP之后提出的又一个具有较大影响力的重构算法.CoSaMP也是对OMP的一种改进,每次迭代选择多个原子,除了 ...
- 【Visual C++】游戏开发五十六 浅墨DirectX教程二十三 打造游戏GUI界面(一)
本系列文章由zhmxy555(毛星云)编写,转载请注明出处. 文章链接:http://blog.csdn.net/poem_qianmo/article/details/16384009 作者:毛星云 ...
- 浅谈Kotlin(二):基本类型、基本语法、代码风格
浅谈Kotlin(一):简介及Android Studio中配置 浅谈Kotlin(二):基本类型.基本语法.代码风格 浅谈Kotlin(三):类 浅谈Kotlin(四):控制流 通过上面的文章,在A ...
- 浅谈Java代理二:Cglib动态代理-MethodInterceptor
浅谈Java代理二:Cglib动态代理-MethodInterceptor CGLib动态代理特点: 使用CGLib实现动态代理,完全不受代理类必须实现接口的限制,而且CGLib底层采用ASM字节码生 ...
- 【沥血整理】灰度(二值)图像重构算法及其应用(morphological reconstruction)。
不记得是怎么接触并最终研究这个课题的了,认识我的人都知道我是没有固定的研究对象的,一切看运气和当时的兴趣.本来研究完了就放在那里了,一直比较懒的去做总结,但是想一想似乎在网络上就没有看到关于这个方面的 ...
随机推荐
- 双倍浮向(双倍边距)(只有IE6出现)
声明: web前端学习笔记,欢迎大神指点.联系QQ:1522025433. 描述:在IE6中,一个居左(或居右)浮动的元素放置进一个容器盒(box),并在浮动元素上使用了左边距(或右边距) 在ie6内 ...
- VS2008/2005 MFC程序调试经验
我的VS2008不知道是有bug还是自己的问题,很多时候变量定义后CTRL+F5运行却没反应,一定要“生成解决方案”下才行? 1.没有可用于当前位置的源代码 将工具->选项->调试-> ...
- CSS3:透明度
<!DOCTYPE html> <html lang="en"> <head> <meta charset="UTF-8&quo ...
- C#中decimal ,double,float的区别
浮点型 Name CTS Type Description Significant Figures Range (approximate) float System.Single 32-bit sin ...
- centos6.5上安装配置telnet服务
https://blog.csdn.net/wx5040257/article/details/78327915
- 对MariaDB10.0的Sphinx进行扩展
已修改过的文件:http://pan.baidu.com/s/1o8DHvkA 将这两个文件放到MariaDB的解压目录后,再进行安装 /usr/local/mariadb-10.0.28/stora ...
- 使用sshtunnel实现python公网连接阿里云mongo服务器
背景: 公司使用阿里云的云数据库MongoDB.基于安全原因考虑,阿里云MongoDB云数据库目前只支持从阿里云ECS上访问,无法通过公网直接访问,不方便用户在本地开发环境里直接进行测试. 阿里云官方 ...
- floor()函数 和round()函数的区别
floor()函数 和round()函数的区别 2018-08-17 09:40:00 1.floor()函数:取整,保留整数部分,舍弃小数部分. 2.round()函数:四舍五入.round(x, ...
- Metasploit AFP爆破模块afp_login
Metasploit AFP爆破模块afp_login AFP是苹果系统支持的文件服务.用户可以使用指定的账户名和密码进行远程文件管理.afp_login是一个AFP认证信息暴力破解模块.它支持对 ...
- Python学习——迭代器&生成器&装饰器
一.迭代器 迭代器是访问集合元素的一种方式.迭代器对象从集合的第一个元素开始访问,直到所有的元素被访问完结束.迭代器只能往前不会后退迭代器的一大优点是不要求事先准备好整个迭代过程中所有的元素.迭代器仅 ...