强化学习4-时序差分TD
之前讲到强化学习在不基于模型时可以用蒙特卡罗方法求解,但是蒙特卡罗方法需要在每次采样时生产完整序列,而在现实中,我们很可能无法生成完整序列,那么又该如何解决这类强化学习问题呢?
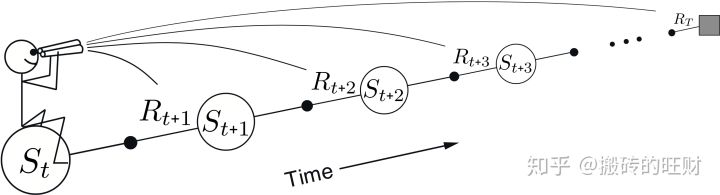
由贝尔曼方程 vπ(s)=Eπ(Rt+1+γRt+2+γ2Rt+3+...|St=s) 推导可得 vπ(s)=Eπ(Rt+1+γvπ(st+1)|st=s),由此给我们的启发是,可以拿下一个状态的价值函数来表示当前状态的价值函数,即t+1时刻表示t时刻,这就引入了时序差分。
这样只需要两个连续的状态,就可以尝试解决强化问题了。
同蒙特卡罗一样,时序差分也可以解决预测和控制问题
从表现形式上对比分析TD与MC
1.时序差分不需要完整的状态序列
// 也就是说,时序差分可以在知道结果之前学习,或者说在没有结果时学习,还可以在持续进行的环境中学习 ;
// 而蒙特卡罗只能在知道结果时学习
2.蒙特卡罗是在真实的实验中用少数几次的值来近似真实值,而时序差分并没有真实的实验,而是完全瞎猜,即用随机数来初始化V (当然你也可以通过试验初始化)
3.正常情况下,蒙特卡罗的更新方式是 V(St)=V(St)+1/N(St) (Gt−V(St)),而时序差分没有N(状态s在完整序列中出现的次数),估只能用V(St)=V(St)+α (Gt−V(St)) 来更新
// 此处 Gt=Rt+1+γvπ(st+1),称为St状态的TD目标值,vπ(st)是估计值,Gt-vπ(st)叫误差,α就是学习率,这里类似梯度下降。
4.蒙特卡罗使用实际的收获来更新状态价值,是某一策略下状态价值的无偏估计;
而时序差分使用TD目标值,即基于即时奖励和下一状态的估计值来替代当前状态的收获,属于状态价值的有偏估计
// 常用 vπ(st) 表示当前状态的实际价值
// 常用Vπ(St) 表示当前状态的预估价值
// 一般为书写方便,随便写了
通常来讲,时序差分更加灵活,在主流的强化学习解决方法中,都是基于时序差分。
接下来我们看看时序差分解决预测问题
1.输入{S A R π γ}
2.生成两个连续状态
// 由于时序差分用下一个状态更新当前状态,故首先要有2个状态,或者先初始化一个状态,此时再取下一个状态
3.计算TD目标值,并更新当前状态价值
4.取下一个状态,直至终点
5.重新从起点开始迭代
// 当然第五步中不一定必须从起点开始迭代,可以随机取状态
// 第四步中也不一定要取下一个状态,也可以随机取状态 (后续会讲到q learning 和 sarsa时用到此点)
// 具体可以参考实际情况
6.直至收敛
实例对比TD和MC求解预测问题的不同
假设我们的强化学习问题有A,B两个状态,模型未知,不涉及策略和行为。只涉及状态转化和即时奖励。衰减因子为1。一共有8个完整的状态序列如下:
① A,0,B,0 ②B,1 ③B,1 ④ B,1 ⑤ B,1 ⑥B,1 ⑦B,1 ⑧B,0
1.对于MC
大体思路:MC是每次生成完整序列,然后计算该序列中每个状态的价值,最后根据完整序列个数进行累积均值更新。
换个更简单的说法,每个完整序列中该状态的价值,求和,再求平均
状态价值采用 Gt=Rt+1+γRt+2+γ2Rt+3+...γT−t−1RT
那么上例中 A 只存在于1个完整序列中,估v=0/1=0,B存在于8个序列,故v=(0+1+1+..+0)/8=6/8
2.对于TD
大体思路:找到当前状态的下一个状态,然后用下一个状态的预估值和即时奖励来更新该状态的价值,再取状态
换个更简单的说法,用下一个状态来更新当前状态,之后再取一个状态,迭代,求平均
状态价值采用 vπ(s)=Rt+1+γvπ(st+1)
由于B没有后续状态,故v=所有回报/总个数=6/8,v(A)=R+γv(B)=6/8
N步时序差分
上面讲到用后一个状态来表示当前状态,那么能不能用后两个状态来表示呢?后三个呢?N个呢?都是可以的

相应TD目标值是
后一个 Gt(1)=Rt+1+γvπ(St+1) TD(0)
后两个 Gt(2)=Rt+1+γRt+2+γ2vπ(St+2) TD(1)
后三个 Gt(3)=R+γR+γRt+1t+22t+3+γv(S3πt+3)
后N个 Gt(n)=Rt+1+γRt+2+γ2Rt+3+...+γn-1Rt+n+γnV(St+n)
...
后∞个 Gt(∞) MC
常定义为n-步收获(n-step return)
1. N步学习的价值更新公式
V(St)=V(St)+α(Gt(n)-V(St))
2. N步学习 策略评估 步骤
首先,牢记这个公式 Gt(n)=Rt+1+γRt+2+γ2Rt+3+...+γn-1Rt+n+γnV(St+n)
// t=0时,Gt(n)=R1+γR2+γ2R3+...+γn-1Rn+γnV(Sn)
// n步,其实是从0走到n-1,就能得到Rn和V(Sn)
// 习惯上我们把 n步链条认为从0到n,只是方便理解
输入:{S A R π γ α} n为步数,T为回合终点,初始化状态价值表
输出:状态价值表
1. 循环 生成片段(从某点开始,到终点,一般从起点开始)
2. 对于片段中的每一步 t=0,1,2...n-1,n...T
. 初始状态S根据π选择A,得到R和S'
. τ=t+1-n
// 这步首先是计数,看看t走到哪里了,够不够n步
// 如果t=0,n=1,0+1-1=0,状态比步数少1,所以+1,当前时刻的下一步就够n步
// 刚开始肯定是负数
. 当τ>=0 (当t=n-1时,τ=0,从这一刻起,每个状态都可以往前推n步了,而此时需要从R1开始算,而τ+1=1)
.. 计算GR,GR=Σi=τ+1 min(τ+n, T)γi-τ-1Ri (这就是TD目标值的全部R)
.. 如果τ+n<T,G=GR+γnV(Sτ+n) (这就是TD目标值,如果τ+n >T,说明片段已超过终点,不存在这种情况)
.. V(Sτ)=V(Sτ)+α(G-V(Sτ))
.. 直至终点 (实际上只需到终点即可,无需判断τ+n<T,因为在终点之前,都是τ+n<T)
3. 直至v收敛

那么到底n取多少合适呢?
貌似并没有什么好的办法来确定,即使这个问题确定了,另外的问题不一定适用,所以索性取1到∞,于是引入了TD(λ)。
TD(λ) λ€[0, 1]
这种方法其实是综合考虑了所有N步收获,但是如何综合?一般情况下是加权平均。
引入参数λ
1. λ 收获
// λ 收获 Gtλ 综合考虑了1到∞的所有步收获,给每一步收获一个权重 (1-λ)λn-1 这样 Gtλ=(1-λ)Σ1∞λ(n-1)Gt(n)
2. λ 预测
// Vπ(St)=Vπ(St)+α(Gt(n)-Vπ(St)
// 各步收获的权重分配图,图中最后一列 λ 的指数是 T-t-1。T 为终止状态的时刻步数,t为当前状态的时刻步数,所有的权重加起来为1。(最后一列的权重不是按上述权重公式计算,而是需要权重和为1,即1-前面的权重和)

当λ为0时,退化为TD(0), 只有第一列
当λ为1时,退化为MC,只有最后一列
3. TD(λ)对于权重分配的图解

// 例如对于 n=3 的3-步收获,赋予其在 λ 收获中的权重如左侧阴影部分面积,对于终止状态的T-步收获,T以后的所有阴影部分面积。而所有节段面积之和为1。这种几何级数的设计也考虑了算法实现的计算方便性。
TD(λ)的设计使得每个回合中,当前状态的的状态价值与后续所有状态的价值有关,也就是说当前状态的价值影响了之前所有状态的价值。只是影响的权重不同,距离越远,权重越小。
前向认识TD(λ)
注意这里的前向的方向是从当前状态到后续状态
当我们拿着望远镜从当前状态向后续状态看,发现需要每个状态的价值,也就是需要走完整个回合,这和MC一样,需要完整序列,所以TD(λ)具有和MC一样的劣势。
后向认识TD(λ)

先看个例子,并引入一些概念
示例解释TD(λ) -- 被电击的原因
当老鼠听到3次响铃和看到1次亮灯后,被电击
那么老鼠被电击是因为响铃呢还是因为亮灯?还是两者兼有?兼有的话哪个更重要呢?

首先引入两个概念
1. 频率启发:将原因归结于发生频率最高的状态
2. 就近启发:将原因归结于最近发生的状态
再次引入一个概念
给每个状态设置一个资格迹(Eligibility Traces,ES,也叫效用迹,或效用追踪,后续会详细介绍),就是综合考虑 频率启发 和 就近启发
资格迹对应每个状态(或者s a)
E0(s)=0 每个s的初始值为0
Et(s)=γλEt-1(s) t时刻的ES是前一时刻ES的衰减,如果该时刻没有发生s,如第3次响铃后下一个时刻是亮灯,没有发生响铃,那么这次响铃的ES就是衰减值
Et(s)=γλEt-1(s)+1 t时刻的ES是前一时刻ES的衰减+1,如果该时刻发生了s,如第1次响铃后下一时刻是响铃,那么第1次响铃的ES就是衰减值+1
用图像来表示上面公式,一个可能的曲线图(该方法很多变种)

横坐标是时间,横坐标下的竖线代表发生了s状态;纵坐标是ES的值。
从图中可以看出,当某状态连续出现时,该状态的ES会在一定衰减的基础上,有一个单位的提高,此时将增加该状态对最终收获的影响比重,
同时,如果该状态距离最终状态较远,则其对最终收获的影响越小。
其实资格迹就是一个信度分配的问题。
比如我们下棋,最后输了,到底中间哪一步负责? 或者每一步都有责任,那么每一步的责任分别是多少呢?这就是一个信度分配的问题。
再如老鼠被电击,是因为响铃还是亮灯,合理的解释是两者都有,于是老鼠为这两个事件分别分配了权重,如果某个事件 s 发生,那么 s 对应的资格迹的值就加1,如果在某一段时间 s 未发生,则按照某个衰减因子进行衰减,这也就是上面的资格迹的计算公式了。
特别的, ES 值并不需要等到完整的episode结束才能计算出来,它可以每经过一个时刻就得到更新。 ES值存在饱和现象,有一个瞬时最高上限:Emax=1/(1-γλ)
// ET是一个非常符合神经科学相关理论的、非常精巧的设计。把它看成是神经元的一个参数,它反映了神经元对某一刺激的敏感性和适应性。神经元在接受刺激时会有反馈,在持续刺激时反馈一般也比较强,当间歇一段时间不刺激时,神经元又逐渐趋于静
息状态;同时不论如何增加刺激的频率,神经元有一个最大饱和反馈。)
案例结束
重新认识后向视角
后向视角引入了资格迹的概念,每个状态都有一个资格迹。我们可以将资格迹理解为权重
// 离当前时刻越远,对价值函数的影响越小
// 被访问的次数越少,对价值函数影响越小
TD(λ)后向视角解释:有个人坐在状态流上,拿着话筒面向经历过的状态,并根据当前状态的回报和下一状态的价值函数得到TD偏差后,此人告诉经过的状态需要根据TD偏差更新自己的价值函数,更新的程度与经过的状态和当前状态的距离有关。
假设当前状态为 St,TD偏差为 δt,那么 St-1 处的值函数更新应该乘以一个衰减因子 γλ,状态St-2 处的值函数更新应该乘以 (γλ)2,以此类推。把刚才的描述体现在公式里更新状态价值,是这样的:
δt=Rt+1+γV(St+1)-V(St)
V(S)=V(S)+αδtEt(S)
后向和前向可互推,结果一样,具体参考 https://zhuanlan.zhihu.com/p/51552679
时序差分解决控制问题
1.条件{S A R π γ} 探索率ε
2.状态动作价值
3.价值更新,选下一个状态动作
4.策略更新,可用 ε-贪心
总结
时序差分也是不基于模型的强化学习解决方法。
比蒙特卡罗更灵活,是目前主流强化学习的基本思想。
强化学习4-时序差分TD的更多相关文章
- 强化学习8-时序差分控制离线算法Q-Learning
Q-Learning和Sarsa一样是基于时序差分的控制算法,那两者有什么区别呢? 这里已经必须引入新的概念 时序差分控制算法的分类:在线和离线 在线控制算法:一直使用一个策略选择动作和更新价值函数, ...
- 强化学习(五)用时序差分法(TD)求解
在强化学习(四)用蒙特卡罗法(MC)求解中,我们讲到了使用蒙特卡罗法来求解强化学习问题的方法,虽然蒙特卡罗法很灵活,不需要环境的状态转化概率模型,但是它需要所有的采样序列都是经历完整的状态序列.如果我 ...
- 强化学习(六)时序差分在线控制算法SARSA
在强化学习(五)用时序差分法(TD)求解中,我们讨论了用时序差分来求解强化学习预测问题的方法,但是对控制算法的求解过程没有深入,本文我们就对时序差分的在线控制算法SARSA做详细的讨论. SARSA这 ...
- 【转载】 强化学习(六)时序差分在线控制算法SARSA
原文地址: https://www.cnblogs.com/pinard/p/9614290.html ------------------------------------------------ ...
- 【转载】 强化学习(五)用时序差分法(TD)求解
原文地址: https://www.cnblogs.com/pinard/p/9529828.html ------------------------------------------------ ...
- 强化学习之 免模型学习(model-free based learning)
强化学习之 免模型学习(model-free based learning) ------ 蒙特卡罗强化学习 与 时序查分学习 ------ 部分节选自周志华老师的教材<机器学习> 由于现 ...
- 强化学习(八)价值函数的近似表示与Deep Q-Learning
在强化学习系列的前七篇里,我们主要讨论的都是规模比较小的强化学习问题求解算法.今天开始我们步入深度强化学习.这一篇关注于价值函数的近似表示和Deep Q-Learning算法. Deep Q-Lear ...
- 【转载】 强化学习(八)价值函数的近似表示与Deep Q-Learning
原文地址: https://www.cnblogs.com/pinard/p/9714655.html ------------------------------------------------ ...
- 强化学习-时序差分算法(TD)和SARAS法
1. 前言 我们前面介绍了第一个Model Free的模型蒙特卡洛算法.蒙特卡罗法在估计价值时使用了完整序列的长期回报.而且蒙特卡洛法有较大的方差,模型不是很稳定.本节我们介绍时序差分法,时序差分法不 ...
随机推荐
- LeetCode--014--最长公共前缀(java)
编写一个函数来查找字符串数组中的最长公共前缀. 如果不存在公共前缀,返回空字符串 "". 示例 1: 输入: ["flower","flow" ...
- IBM messed up *AGAIN* in their thinkpad: 0xA0000 -> 0x9F000
/* * IBM messed up *AGAIN* in their thinkpad: 0xA0000 -> 0x9F000. * They seem to have don ...
- 机器学习ML策略
1.为什么是ML策略 例如:识别cat分类器的识别率是90%,怎么进一步提高识别率呢? 想法: (1)收集更多数据 (2)收集更多的多样性训练样本 (3)使用梯度下降训练更长时间 (4)尝试Adam代 ...
- Northcott Game HDU - 1730
Tom和Jerry正在玩一种Northcott游戏,可是Tom老是输,因此他怀疑这个游戏是不是有某种必胜策略,郁闷的Tom现在向你求救了,你能帮帮他么? 游戏规则是这样的: 如图所示,游戏在一个n行m ...
- 20165309 实验二 Java面向对象程序设计
2017-2018-2 20165309实验二<Java面向对象程序设计>实验报告 一.实验内容 1. 初步掌握单元测试和TDD 2. 理解并掌握面向对象三要素:封装.继承.多态 3. 初 ...
- vue嵌套路由--params传递参数
在嵌套路由中,父路由向子路由传值除了query外,还有params,params传值有两种情况,一种是值在url中显示,另一种是值不显示在url中. 1.显示在url中index.html <d ...
- MSMQ消息传递的优先级
一.消息传递的优先级 在MSMQ中消息在队列里传输是分有优先级的,这里我就以实例的形式介绍下关于优先级的使用,优先级一共有七种,MessagePriority枚举里全部进行了封装.因这里只作程序演示就 ...
- python 小白学习(1)
自定义错误类型 class XxxError(Exception): def __init__(self , message): self = Exception("xxxxx") ...
- ubuntu 双硬盘挂载 windows分区自动挂载
sudo fdisk -l 查看硬盘情况 1:新建一个目录,例:old 2:mount /dev/sdb1 old 3:cd old 4:ls (就可以看到新硬盘的内容了) 取消挂载:umoun ...
- spring boot 打包可以运行,但是执行main方法不能运行
报错信息如下 2017-10-23 15:16:09.750 ERROR 7664 --- [ restartedMain] o.s.b.d.LoggingFailureAnalysisReport ...