[炼丹术]yolact训练模型学习总结
yolact训练模型学习总结
一、YOLACT介绍(You Only Look At CoefficienTs)

1.1 简要介绍
yolact是一种用于实时实例分割的简单、全卷积模型。
(A simple, fully convolutional model for real-time instance segmentation.
论文摘要介绍Abstract:我们提出了一个用于实时实例分割的简单全卷积模型,在单个Titan Xp上以33 fps在MS COCO上实现了29.8 mAP,这比以前的任何算法都要快得多。此外,我们只在一个GPU上训练后获得此结果。我们通过将实例分割分成两个并行子任务:(1)生成一组原型掩膜(prototype mask);(2)预测每个实例的掩膜系数(mask coefficients)。然后我们通过将原型与掩模系数线性组合来生成实例掩膜(instance masks)。我们发现因为这个过程不依赖于 repooling,所以这种方法可以产生非常高质量的掩模。此外,我们分析了 the emergent behavior of our prototypes,并表明他们学会以 translation variant manner 定位实例,尽管是完全卷积的。最后,我们还提出了快速NMS(Fast NMS),比标准NMS快12 ms,只有一点点性能损失。
1.2 paper with code
下面是官方团队论文和代码(两个白线):
- YOLACT:实时实例分割
- YOLACT++:更好的实时实例分割
- paper:yolact
- github:yolact
YOLACT++ (v1.2) 发布!(变更日志)
YOLACT++ 的 resnet50 模型在 Titan Xp 上以 33.5 fps 运行,在 COCO 上达到 34.1 mAP test-dev(在此处查看我们的期刊论文)。
为了使用 YOLACT++,请确保编译 DCNv2 代码。(可见安装)
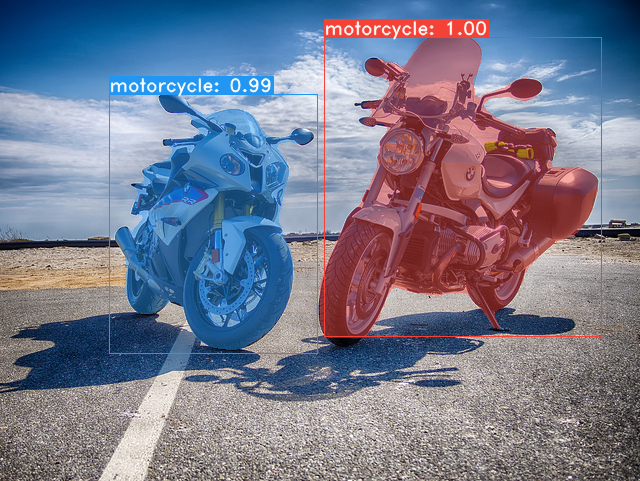
1.3 测试效果
下面是在coco数据集上的测试效果:
 |
 |
 |
|---|
此处是一个实时实例分割的Demo演示视频:
二、环境搭建及配置
2.1 搭建环境
搭建Python3环境。
这里可以利用anaconda新建一个虚拟环境,然后参考environment.yml进行相应依赖库的安装。# 新建虚拟环境
conda create -n train python=3.7
# 激活虚拟环境
conda activate train
# 安装相应依赖库
pip install opencv-python==4.5.3.56
pip install matplotlib==3.4.3
pip install pillow==8.3.1
pip install pycocotools==2.0.2
pip install PyQt5==5.9.2
pip install torchvision==0.8.1
pip install pytorch==1.7.1
安装 Pytorch 1.0.1(或更高版本)和 TorchVision。
安装一些其他软件包:
# Cython needs to be installed before pycocotools
pip install cython
pip install opencv-python pillow pycocotools matplotlib
克隆这个存储库并进入该目录:
git clone https://github.com/dbolya/yolact.git
cd yolact
如果您想训练 YOLACT,请下载COCO数据集和2014/2017注释。请注意,此脚本将需要一段时间并将 21gb 的文件转储到
./data/coco.
下面是通过脚本下载COCO数据集的方式:sh data/scripts/COCO.sh
如果您想在 上评估 YOLACT
test-dev,请test-dev使用此脚本下载。sh data/scripts/COCO_test.sh
如果要使用 YOLACT++,请编译可变形卷积层(来自DCNv2)。确保您从NVidia 的网站安装了最新的 CUDA 工具包。
cd external/DCNv2
python setup.py build develop
这里以上几步基本可以参考官方readme的步骤。在数据集下载的时候,也可直接通过
COCO.sh脚本下的下载地址利用wget进行下载,解压文件之后存放到指定位置就好。在./data目录下执行:
# 数据集与验证集下载
wget http://images.cocodataset.org/zips/train2017.zip
wget http://images.cocodataset.org/zips/val2017.zip
unzip -qqjd ../images ../images/train2017.zip
unzip -qqjd ../images ../images/val2017.zip
# 数据集相关标注文件
wget http://images.cocodataset.org/annotations/annotations_trainval2014.zip
wget http://images.cocodataset.org/annotations/annotations_trainval2017.zip
unzip -qqd .. ./annotations_trainval2014.zip
unzip -qqd .. ./annotations_trainval2017.zip
# 清除压缩文件
rm ../images/train2017.zip
rm ../images/val2017.zip
rm ./annotations_trainval2014.zip
rm ./annotations_trainval2017.zip
2.2 模型评估
在搭建完成基本环境与源码之后,我们需要下载官方作者开放的对应权重模型,也即为weights下的.pth文件,若yolact根目录下没有weights文件目录则需要自行创建。
2.2.1 评估数据预览及权重文件下载
下面给出了yolact在不同Image Size大小下的FPS 和 mAP评估数据以及相应的权重文件(截止到2019 年 4 月 5 日):
| Image Size | Backbone | FPS | mAP | Weights(谷歌云端硬盘) | 镜像 |
|---|---|---|---|---|---|
| 550 | Resnet50-FPN | 42.5 | 28.2 | yolact_resnet50_54_800000.pth | Mirror |
| 550 | Darknet53-FPN | 40.0 | 28.7 | yolact_darknet53_54_800000.pth | Mirror |
| 550 | Resnet101-FPN | 33.5 | 29.8 | yolact_base_54_800000.pth | Mirror |
| 700 | Resnet101-FPN | 23.6 | 31.2 | yolact_im700_54_800000.pth | Mirror |
同上,下面是YOLACT++模型 (2019 年 12 月 16 日发布):
| Image Size | Backbone | FPS | mAP | Weights(谷歌云端硬盘地址) | 镜像 |
|---|---|---|---|---|---|
| 550 | Resnet50-FPN | 33.5 | 34.1 | yolact_plus_resnet50_54_800000.pth | Mirror |
| 550 | Resnet101-FPN | 27.3 | 34.6 | yolact_plus_base_54_800000.pth | Mirror |
要评估模型,请将相应的权重文件放在./weights目录中并运行以下命令之一。每个配置的名称是文件名中数字之前的所有内容(例如,yolact_basefor yolact_base_54_800000.pth)。
下面提供一段脚本代码进行这部分内容的整合,(由于Weights列中为谷歌云端硬盘的下载链接,因此这里设置的是Mirror镜像链接地址)
为方便下载,这里提供腾讯微云的下载链接: yolact_weight
如何去评估一个模型的好坏及其训练后的性能,我们需要对其数值数据上进行定性、定量及其最基准的评估与分析,同时直接对其进行图像与视频的预测测试。
2.2.2 评估COCO数据集下的定量结果
杳在整个验证集上量化评估训练模型,需确保已按上述方式下载 COCO数据集。
##mAP。
#输出一个COCOEval json 提交给网站或者使用run_coco_eval.py 脚本。
#此命令将分别创建 './results/bbox_detections.json' 和 './results/mask_detections.json' 用于检测和实例分割。
python eval.py --trained_model=weights/yolact_base_54_800000.pth
#您可以在上一个命令中创建的文件上运行 COCOEval。性能应该与在 eval.py 中的实现相匹配。
python eval.py --trained_model=weights/yolact_base_54_800000.pth --output_coco_json
#要为 test-dev 输出 coco json 文件,请确保您已经从上面下载了 test-dev 并转到对应位置
python run_coco_eval.py
python eval.py --trained_model=weights/yolact_base_54_800000.pth --output_coco_json --dataset=coco2017_testdev_dataset
2.2.3 评估COCO数据集下的定性结果
#在 COCO 上显示定性结果。从这里开始,我将使用 0.15 的置信阈值。
python eval.py --trained_model=weights/yolact_base_54_800000.pth --score_threshold=0.15 --top_k=15 --display
2.2.4 评估COCO数据集下的基准测试
#只在验证集的前 1k 个图像上运行原始模型
python eval.py --trained_model=weights/yolact_base_54_800000.pth --benchmark --max_images=1000
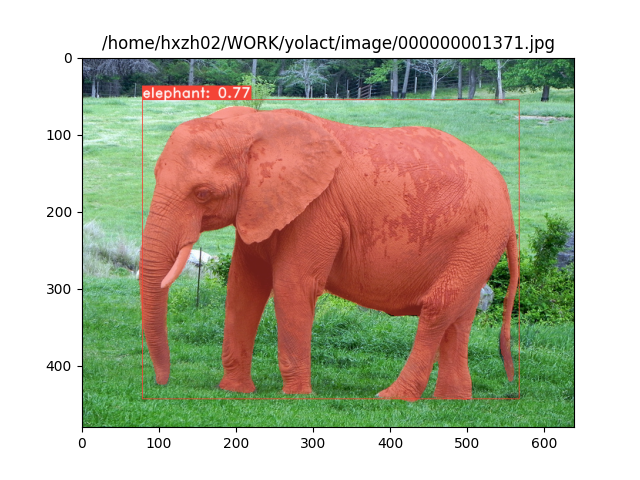
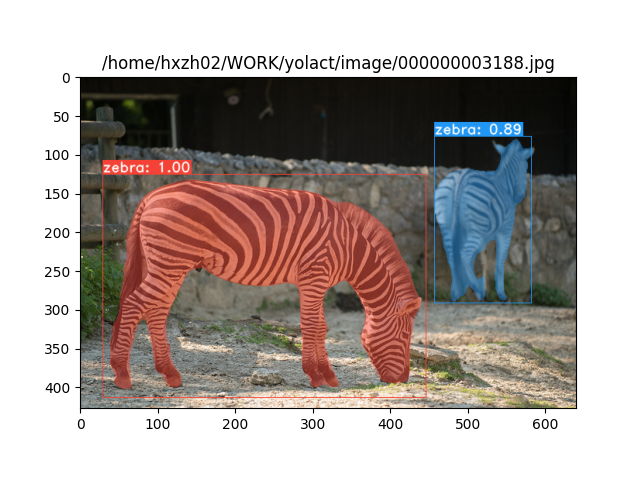
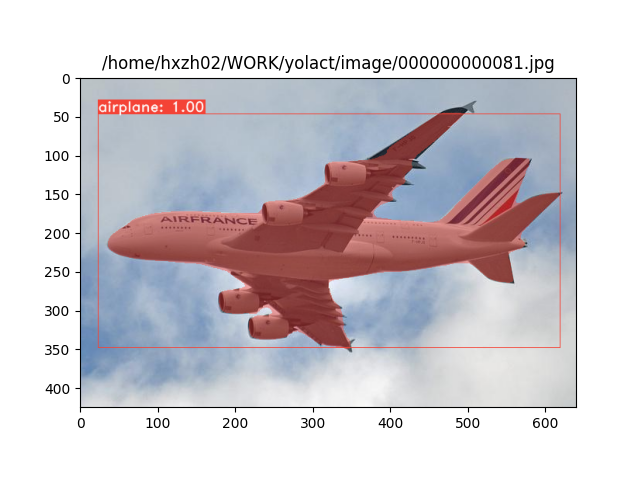
2.2.5 在COCO预训练数据模型上进行图像测试
# 在指定图像上显示定性结果# 对单张图片进行预测
python eval.py --trained_model=weights/yolact_base_54_800000.pth --score_threshold=0.15 --top_k=15 --image=my_image.png
# 处理一个图像并将其保存到另一个文件中
python eval.py --trained_model=weights/yolact_base_54_800000.pth --score_threshold=0.15 --top_k=15 --image=input_image.png:output_image.png
# 处理整个文件夹的图像
python eval.py --trained_model=weights/yolact_base_54_800000.pth --score_threshold=0.15 --top_k=15 --images=path/to/input/folder:path/to/output/folder
下面是COCO图像测试的结果:
 |
 |
 |
|---|
2.2.6 在COCO预训练数据模型上进行视频测试
#实时显示视频。“--video_multiframe”将一次处理那么多帧以提高性能。
#如果需要,可以使用“--display_fps”直接在帧上绘制FPS。
# 对指定视频进行推理预测
python eval.py --trained_model=weights/yolact_base_54_800000.pth --score_threshold=0.15 --top_k=15 --video_multiframe=4 --video=my_video.mp4
# 实时显示网络摄像头提要。如果您有多个网络摄像头,请传递您想要的网络摄像头索引而不是 0。
python eval.py --trained_model=weights/yolact_base_54_800000.pth --score_threshold=0.15 --top_k=15 --video_multiframe=4 --video=0
# 处理视频并将其保存到另一个文件。现在使用与上面相同的管道,所以速度很快!
python eval.py --trained_model=weights/yolact_base_54_800000.pth --score_threshold=0.15 --top_k=15 --video_multiframe=4 --video=input_video.mp4:output_video.mp4
下面是针对大象视频做图像分割的预测示例:
2.3 训练参数及其文件配置
默认情况下,我们在 COCO 上训练。训练前需确保已下载所用的整个数据集。
2.3.1 训练说明
- 要进行训练,请获取一个 imagenet 预训练模型并将其放入
./weights - 运行以下训练命令之一。
- 请注意,您可以在训练时按 ctrl+c,它将
*_interrupt.pth在当前迭代中保存一个文件。 ./weights默认情况下,所有权重都以文件名保存在目录中<config>_<epoch>_<iter>.pth。
- 请注意,您可以在训练时按 ctrl+c,它将
2.3.2 训练操作及参数配置
# 使用批量大小为 8(默认值)的基本配置进行训练。
python train.py --config=yolact_base_config
# 训练 yolact_base_config 的 batch_size 为 5。
# 对于 550px 模型,1 个批次占用大约 1.5 gig 的 VRAM,因此相应地指定。
python train.py --config=yolact_base_config --batch_size=5
# 使用特定的权重文件恢复训练 yolact_base,并从权重文件名中指定的迭代开始。
python train.py --config=yolact_base_config --resume=weights/yolact_base_10_32100.pth --start_iter=-1
# 使用帮助选项查看所有可用命令行参数的描述
python train.py --help
2.3.3 使用多GPU支持训练
YOLACT 现在在训练期间无缝支持多个 GPU:
在运行任何脚本之前,运行:
export CUDA_VISIBLE_DEVICES=[gpus]
- 您应该将 [gpus] 替换为您要使用的每个 GPU 的索引的逗号分隔列表(例如,0,1,2,3)。
- 如果只使用 1 个 GPU,您仍然应该这样做。
- 您可以使用
nvidia-smi.
然后,只需
8*num_gpus
使用上面的训练命令将批量大小设置为。训练脚本会自动将超参数缩放到正确的值。
- 如果您有空闲内存,您可以进一步增加批量大小,但将其保持为您正在使用的 GPU 数量的倍数。
- 如果要为每个 GPU 分配特定于不同 GPU 的图像,可以使用
--batch_alloc=[alloc]其中 [alloc] 是逗号分隔的列表,其中包含每个 GPU 上的图像数量。这必须总和为batch_size。
2.3.4 训练日志记录
YOLACT 现在默认记录训练和验证信息。您可以使用--no_log. 如何进行可视化,这里官方作者没有进一步说明,但不妨参考一下LogVizualizer在utils/logger.py寻求帮助。
2.3.5 训练示例Pascal SBD
这里还包括一个用于训练 Pascal SBD 注释的配置(用于快速实验或与其他方法进行比较)。要在 Pascal SBD 上进行训练,请继续执行以下步骤:
- 从这里下载数据集。它是顶部“概述”部分中的第一个链接(该文件名为
benchmark.tgz)。 - 将数据集提取到某处。在数据集中应该有一个名为
dataset/img. 创建目录./data/sbd(.YOLACT 的根目录在哪里)并复制dataset/img到./data/sbd/img. - 从这里下载 COCO 风格的注释。
- 将注释提取到
./data/sbd/. - 现在您可以使用
--config=yolact_resnet50_pascal_config. 检查该配置以了解如何将其扩展到其他模型。
转换注释的脚本位置在./scripts/convert_sbd.py.
如果想验证我们的结果,可以yolact_resnet50_pascal_config从这里下载我们的权重。
这个模型应该得到 72.3 掩码 AP_50 和 56.2 掩码 AP_70。请注意,“所有”AP 与其他论文中为 pascal 报告的“vol”AP 不同(它们使用0.1 - 0.9增量阈值的平均值,0.1而不是 COCO 使用的阈值)。
2.3.6 自定义数据集训练
您还可以按照以下步骤对自己的数据集进行训练:
2.3.6.1 从预训练开始训练
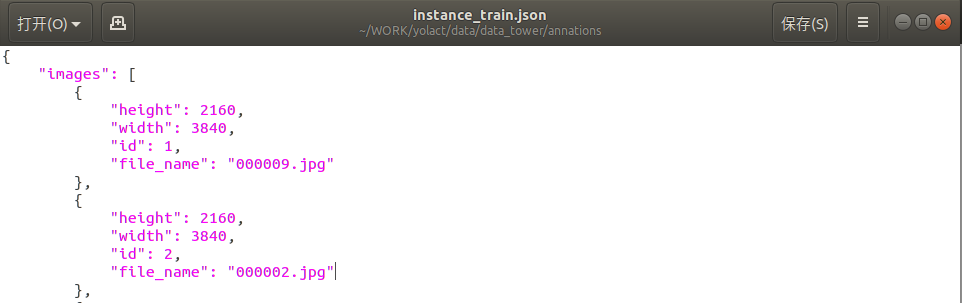
为您的数据集创建一个 COCO 风格的对象检测 JSON 注释文件。可以在此处找到此规范。请注意,我们不使用某些字段,因此可以省略以下内容:
infoliscense- Under
image:license, flickr_url, coco_url, date_captured categories(we use our own format for categories, see below)
在
dataset_basein下为您的数据集创建一个定义data/config.py(dataset_base有关每个字段的解释,请参阅 in中的注释):
my_custom_dataset = dataset_base.copy({
'name': 'My Dataset',
'train_images': 'path_to_training_images',
'train_info': 'path_to_training_annotation',
'valid_images': 'path_to_validation_images',
'valid_info': 'path_to_validation_annotation',
'has_gt': True,
'class_names': ('my_class_id_1', 'my_class_id_2', 'my_class_id_3', ...)
})
- 需要注意的几点:
- 注释文件中的类 ID 应从 1 开始并按
class_names. 如果这不是您的注释文件(就像COCO)的情况下,看到现场label_map的dataset_base。 - 如果您不想创建验证拆分,请使用相同的图像路径和注释文件进行验证。默认情况下(参见
python train.py --help),train.py将每 2 个时期输出数据集中前 5000 个图像的验证 mAP。
- 注释文件中的类 ID 应从 1 开始并按
- 最后,在
yolact_base_config同一个文件中,更改'dataset'to'my_custom_dataset'或您在上面命名的配置对象的值。然后您可以使用上一节中的任何训练命令。
2.3.6.2从头开始创建自定义数据集
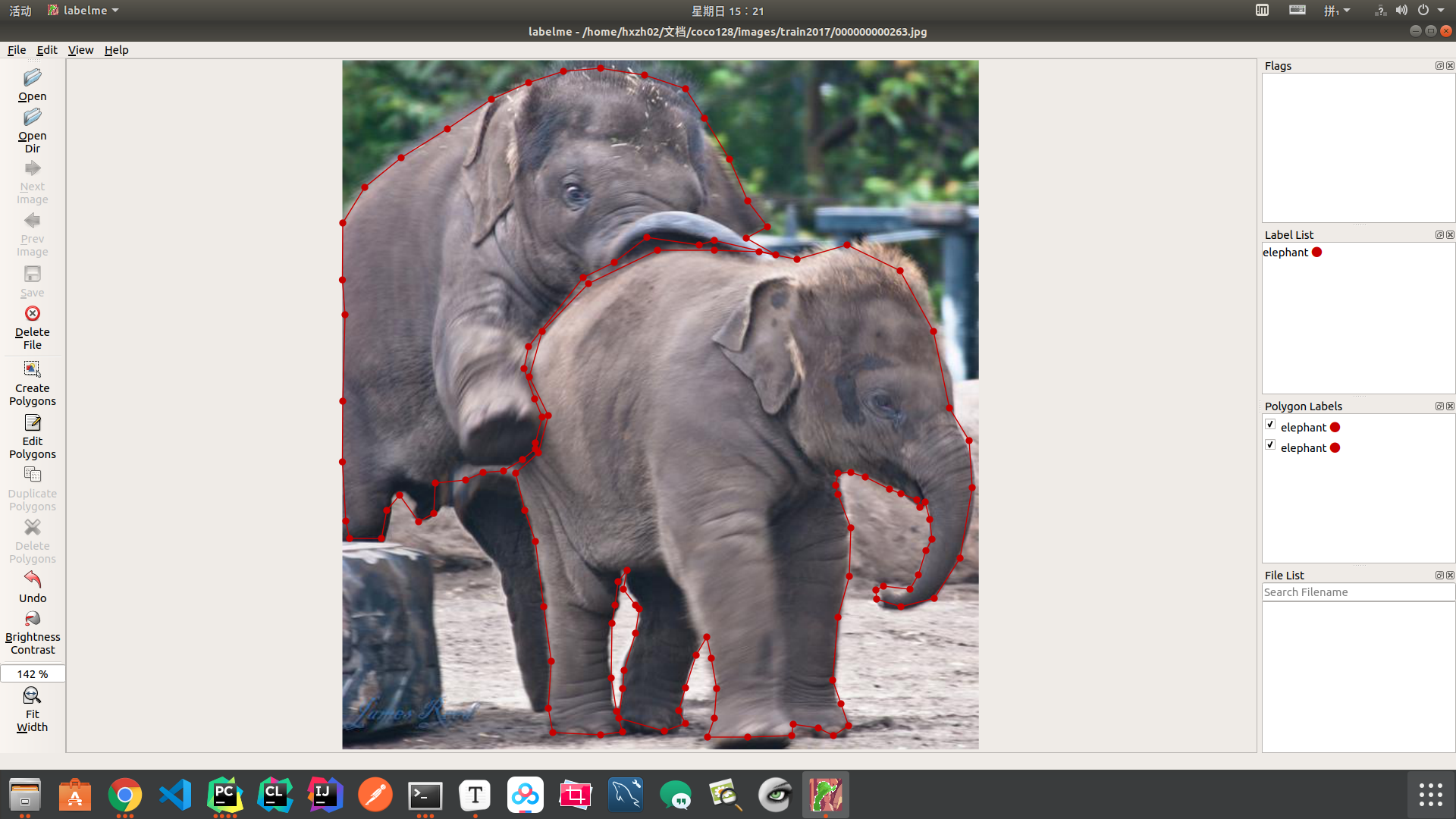
这里使用Labelme 和 labelme2coco.py 可以很好地创建数据集。对于计划在自定义数据集上微调/训练模型的任何人,请按照以下步骤操作:
下载并安装 Labelme ( https://github.com/wkentaro/labelme )
使用提供的多边形标签( Create Polygons)选项进行标记
将为每个标记的图像创建一个 json 文件(与图像同名)
创建一个 label.txt
例如下面这样形式:
__ignore__
_background_
elephant
bird
dog
cat
person
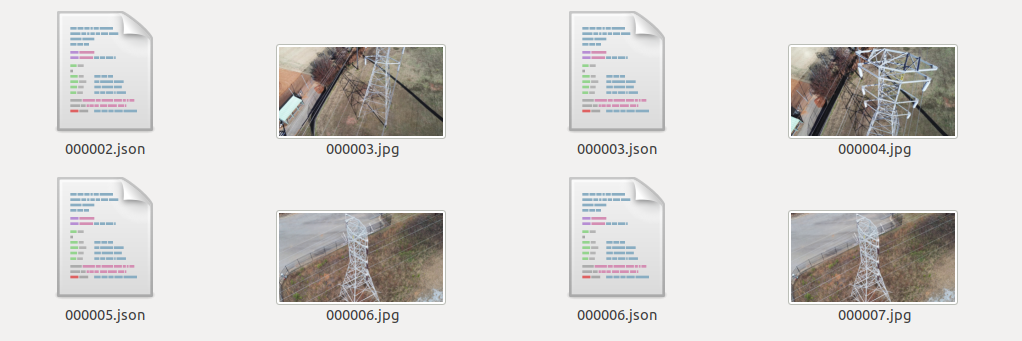
转换生成coco风格的 json
./labelme2coco.py <labelled_data_folder> <out_folder> --labels labels.txt
生成的内容如下:
这部分的更多细节可见:链接
2.3.6.3 配置configs数据集路径与训练参数
数据集制作好了之后,还不能直接进一步训练,这里还缺了关键的一步,就是在config配置文件中修改对应的参数与指定路径。
这里主要修改两部分:my_custom_dataset与yolact_im400_custom_cfg
具体如下:
2.3.6.3.1 配置数据集
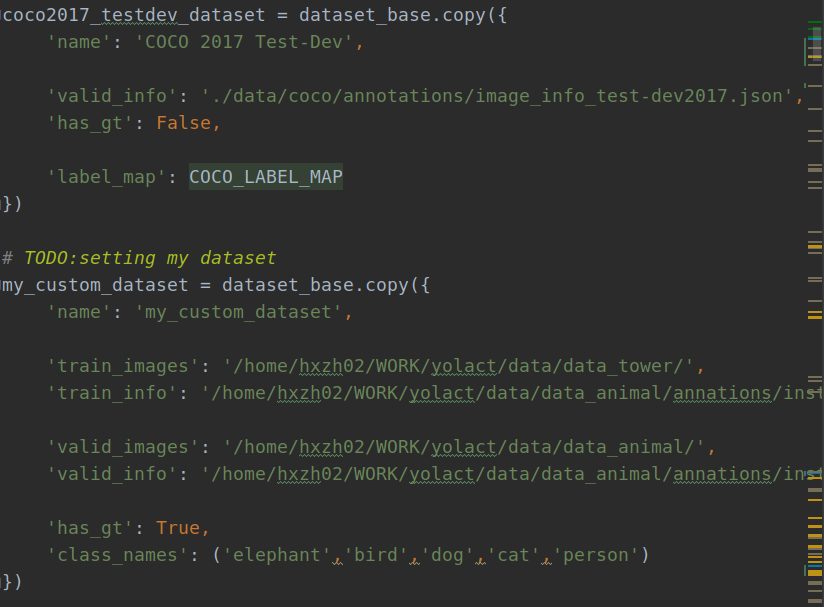
在DATASETS下面相应的加上下面的部分,用来设置自己的数据集。
# TODO:setting my dataset
my_custom_dataset = dataset_base.copy({
'name': 'my_custom_dataset',
'train_images': '/home/hxzh02/WORK/yolact/data/data_tower/',
'train_info': '/home/hxzh02/WORK/yolact/data/data_animal/annations/instance_train.json',
'valid_images': '/home/hxzh02/WORK/yolact/data/data_animal/',
'valid_info': '/home/hxzh02/WORK/yolact/data/data_animal/annations/instance_train.json',
'has_gt': True,
'class_names': ('elephant','bird','dog','cat','person')
})
说明:此处的'name': 'my_custom_dataset'是与后面的 'dataset': my_custom_dataset建立绑定关系的纽带,若设置出错则有可能读不到数据,或是出现其他类型报错等等异常。
另外需要说明的是,若需要检测的目标只有一类,也即为单分类时,需要将'class_names'的后面添加','作为区分,例如('dog'),否则程序会默认将'd', 'o', 'g'三个字母作为实例目标分类名称,从而得到的分类和分类数量都是错误的。若为多分类则可以不用加',',正常设置即可。
如下图:
2.3.6.3.2 配置训练设置cfg
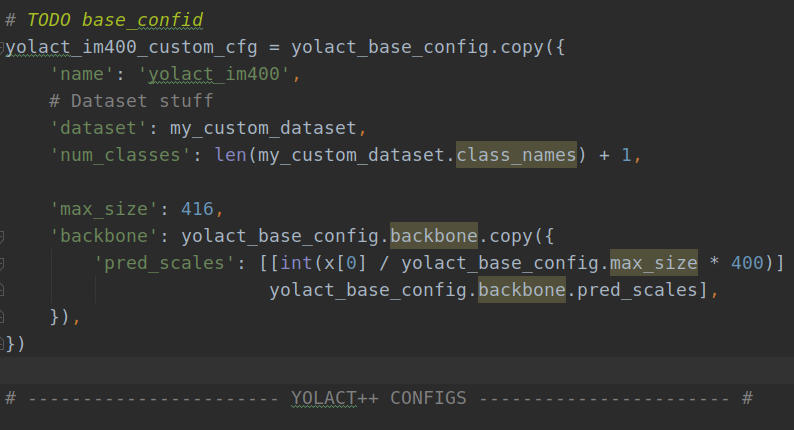
在YOLACT v1.0 CONFIGS下对应的位置加上此段部分,用来建立配置文件与训练的关系。
# TODO base_confid
yolact_im400_custom_cfg = yolact_base_config.copy({
'name': 'yolact_im400',
# Dataset stuff
'dataset': my_custom_dataset, # 数据集定义
'num_classes': len(my_custom_dataset.class_names) + 1, # 类别数
'max_iter': 2000, # 最大迭代次数
'lr_steps': (500, 1000,1500), # 学习率衰减区间
'max_size': 416,
'backbone': yolact_base_config.backbone.copy({
'pred_scales': [[int(x[0] / yolact_base_config.max_size * 400)] for x in
yolact_base_config.backbone.pred_scales],
}),
})
说明:此处的yolact_im400_custom_cfg即为config设置的可选项,定义后可直接在训练时进行调用。这里需要说明的是,程序中没有提供轮次的修改,可根据最大迭代次数进行计算。比如我的数据集只有2000张左右,批次给的是4,我设置了25000,大概迭代轮次为50轮,可以根据自己数据集数量依次类推设置,lr_steps是学习率衰减区间,也可以根据自己设置的最大迭代次数进行设置。至此,配置也修改完成了。
如下图:
2.3.6.3.3 开始训练
与config默认设置为yolact_base_config,训练时默认使用
python train.py --config=yolact_base_config
类似的,在训练自定义数据集时,只需要修改config的可选参数,再根据需要对其他参数进行相应的修改即可,如下所示:
python3 train.py --config=yolact_im400_custom_cfg
python train.py --config=yolact_im400_custom_cfg --batch_size=5
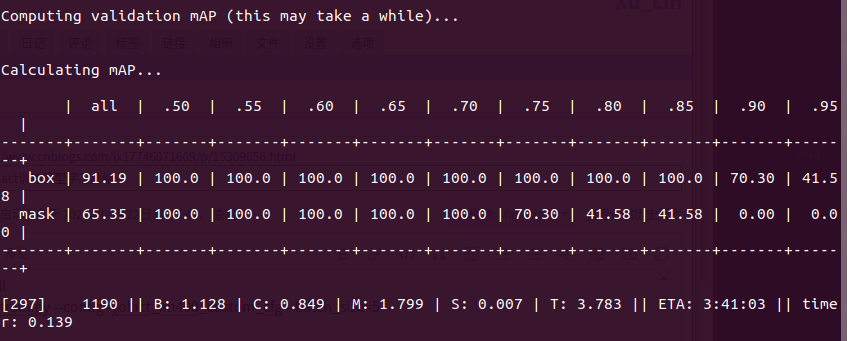
成功开始训练会出现以下信息:

计算mAP
默认迭代10000次会保存一次模型,可以在传参时进行修改。如果训练中断可以使用–resume进行恢复训练:
python train.py --config=yolact_im400_custom_cfg --batch_size 4 --resume
训练过程完成后,或者提前打断时,相应地会在./weights目录下根据迭代次数等参数生成对应的权重文件,如下图:

2.3.6.3.4 评估训练模型
得到权重文件后,我们自然是希望评估模型在验证集上的性能及其他表现,那么类似上面的流程,我们可以通过以下命令来继续评估模型数值作为模型过程的参考。
python eval.py --trained_model=weights/yolact_im400_19_38_interrupt.pth
2.3.6.3.5 测试训练模型
先来看默认设置是怎么测试单张图像:
python3 eval.py --trained_model=weights/yolact_im400_9999_50000.pth --score_threshold=0.3 --top_k=100 --image=/home/hxzh02/WORK/yolact/data/data_tower/000004.jpg
同理,我们也可以在自定义数据集训练后对其进行图像与视频测试,与默认设置的相比,区别只在于需要修改测试的图片路径以及权重的路径:
如下:
python3 eval.py --trained_model=weights/yolact_im400_7999_40000.pth --score_threshold=0.3 --top_k=100 --image=image/0000000000125.jpg
[炼丹术]yolact训练模型学习总结的更多相关文章
- [炼丹术]EfficientDet训练模型学习总结
EfficientDet训练模型学习总结 1.Introduction简介 pytorch用SOTA实时重新实现官方EfficientDet,原文链接:https : //arxiv.org/abs/ ...
- [炼丹术]DeepLabv3+训练模型学习总结
DeepLabv3+训练模型学习总结 一.DeepLabs3+介绍 DeepLabv3是一种语义分割架构,它在DeepLabv2的基础上进行了一些修改.为了处理在多个尺度上分割对象的问题,设计了在级联 ...
- [炼丹术]基于SwinTransformer的目标检测训练模型学习总结
基于SwinTransformer的目标检测训练模型学习总结 一.简要介绍 Swin Transformer是2021年提出的,是一种基于Transformer的一种深度学习网络结构,在目标检测.实例 ...
- 我的Keras使用总结(4)——Application中五款预训练模型学习及其应用
本节主要学习Keras的应用模块 Application提供的带有预训练权重的模型,这些模型可以用来进行预测,特征提取和 finetune,上一篇文章我们使用了VGG16进行特征提取和微调,下面尝试一 ...
- [炼丹术]YOLOv5目标检测学习总结
Yolov5目标检测训练模型学习总结 一.YOLOv5介绍 YOLOv5是一系列在 COCO 数据集上预训练的对象检测架构和模型,代表Ultralytics 对未来视觉 AI 方法的开源研究,结合了在 ...
- 预训练模型——开创NLP新纪元
预训练模型--开创NLP新纪元 论文地址 BERT相关论文列表 清华整理-预训练语言模型 awesome-bert-nlp BERT Lang Street huggingface models 论文 ...
- fine-tuning 两阶段模型
目前大部分的nlp任务采用两阶段的模型,第一阶段进行预训练,一般是训练一个语言模型.最出名的是BERT,BERT的预训练阶段包括两个任务,一个是Masked Language Model,还有一个是N ...
- 深度学习入门篇--手把手教你用 TensorFlow 训练模型
欢迎大家前往腾讯云技术社区,获取更多腾讯海量技术实践干货哦~ 作者:付越 导语 Tensorflow在更新1.0版本之后多了很多新功能,其中放出了很多用tf框架写的深度网络结构(https://git ...
- JS做深度学习2——导入训练模型
JS做深度学习2--导入训练模型 改进项目 前段时间,我做了个RNN预测金融数据的毕业设计(华尔街),当时TensorFlow.js还没有发布,我不得已使用了keras对数据进行了训练,并且拟合好了不 ...
随机推荐
- 源码分析-Consumer
消息消费概述 消息消费以组的模式开展,一个消费组内可以包含多个消费者,每一个消费者组可订阅多个主题,消费组之间有集群模式和广播模式两种消费模式. 集群模式,主题下的同一条消息只允许被其中一个消费者消费 ...
- 【原创】Altium生成Gerber时跳出The Film is too small for this PCB的解决办法
在用altium Designer画板子的时候,要生成gerber文件的时候,会出错,出现这样的提示框:"The Film is too small for this PCB" 原 ...
- 【Other】逻辑分析仪的使用(UART、SPI)
首先上一张接线示意图 上方是UART的接线方式,下方则是SPI的 事实上,这样接就能收到信号了 如果是SPI,要设定自己为主机,UART则没有这个问题 下面来说明逻辑分析仪的界面设定 设定介绍完了 下 ...
- Linux磁盘分区(二)之挂载卸载常用命令
Linux磁盘分区(二)之挂载卸载常用命令 转自:https://blog.csdn.net/qq_36183935/article/details/81053383 https: ...
- 二、SpringBoot实现上传文件到fastDFS文件服务器
上篇文章介绍了如何使用docker安装fastDFS文件服务器,这一篇就介绍整合springBoot实现文件上传到fastDFS文件服务器 1.pom.xml文件添加依赖 <!-- 连接fast ...
- JpaRepository 增删改查
Jpa查询 JpaRepository简单查询 基本查询也分为两种,一种是spring data默认已经实现,一种是根据查询的方法来自动解析成SQL. 预先生成方法 spring data jpa 默 ...
- Redis | 第12章 Sentinel 哨兵模式《Redis设计与实现》
目录 前言 1. 启动并初始化 Sentinel 2. Sentinel 与服务器间的默认通信 2.1 获取主服务器信息 2.2 获取从服务器信息 2.3 向主服务器和从服务器发送信息 3. 接受来自 ...
- vivo浏览器的快速开发平台实践-总览篇
一.什么是快速开发平台 快速开发平台,顾名思义就是可以使得开发更为快速的开发平台,是提高团队开发效率的生产力工具.近一两年,国内很多公司越来越注重研发效能的度量和提升,基于软件开发的特点,覆盖管理和优 ...
- pipeline 步骤
目录 一.简介 二.文件相关 删除当前目录 切换到目录 判断文件是否存在 判断是否为类Unix 返回当前目录 将内容写入文件 读取文件内容 二.制品相关 存取临时文件 三.命令相关 script sh ...
- last显示出unknown用户
这问题是群里有朋友发了一张照片看到的: 出现问题第一时间当然是百度或者谷歌,结果还是查到了,原来是gdm作怪,也可以认为是bug 该用户由GDM创建(可能是由于错误).并不是真的有"未知&q ...