【论文阅读】DSDNet Deep Structured self-Driving Network
前言引用
[2] DSDNet Deep Structured self-Driving Network Wenyuan Zeng, Shenlong Wang, Renjie Liao, Yun Chen, Bin Yang, Raquel Urtasun (ECCV 2020)
从这里我们进入了比较正式的期刊论文(我其实挺喜欢NVIDIA的写作风格类似于报告 但是比较易懂 让我们下次看看这篇吧)正式所以摘要很少 hhh
摘要
万事从摘要开始:
In this paper, we propose the Deep Structured self-Driving Network (DSDNet), which performs object detection, motion prediction, and motion planning with a single neural network. Towards this goal, we develop a deep structured energy based model which considers the interactions between actors and produces socially consistent multimodal future predictions. Furthermore, DSDNet explicitly exploits the predicted future distributions of actors to plan a safe maneuver by using a structured planning cost. Our sample-based formulation allows us to overcome the di culty in probabilistic inference of continuous random variables. Experiments on a number of large-scale self driving datasets demonstrate that our model signi cantly outperforms the state-of-the-art.
碎碎念:这次的摘要很短,如果只看摘要可能会很疑惑,比如interactions between actors, produces socially(socially还能数据化?->其实就是预测其他车的运动), 基于样本去formulation, probabilistic inference of continuous random variables(直译:连续随机变量的概率推理 这是指哪个现象呢 )前面两个在介绍部分就解释了一下
1.interactions between actors:指其中一个的actor的行为会影响到其他的actor(actor翻译成对象还是啥好呢 所以就中英夹杂了)
2.produces socially consistent multimodal future predictions:虽然我还是没能理解socially?可能是语言上?但是从介绍部分这个就是1.的延伸,行为会相互影响所以 model the future motions of actors with multi-modal distributions就是十分重要的。
所以这篇文章干的事情就是:输入数据,三个分支(但是一张网?此点待看)对于规划的cost function采取基于样本的形式(数据+人为),明显和上一个NVIDIA的暴力学习不同的是,1.加入了概率模型去预测未来在决定驾驶,2.prediction module uses an energy-based formulation to explicitly capture the interactions among actors and xxx(见介绍的最后部分),3.训练集采用的开源 2个真实世界,1个CARLA仿真见[6][15,39]的参考出处可得
Contribution
- Our prediction module uses an energy-based formulation to explicitly capture the interactions among actors and predict multiple future outcomes with calibrated uncertainty.
- Our planning module considers multiple possibilities of how the future might unroll, and outputs a safe trajectory for the self-driving car that respects the laws of traffic and is compliant with other actors.
- We address the costly probabilistic inference with a sample-based framework.
Method
从开头的这两幅图结合介绍看,对整个框架应该可以认识的很快
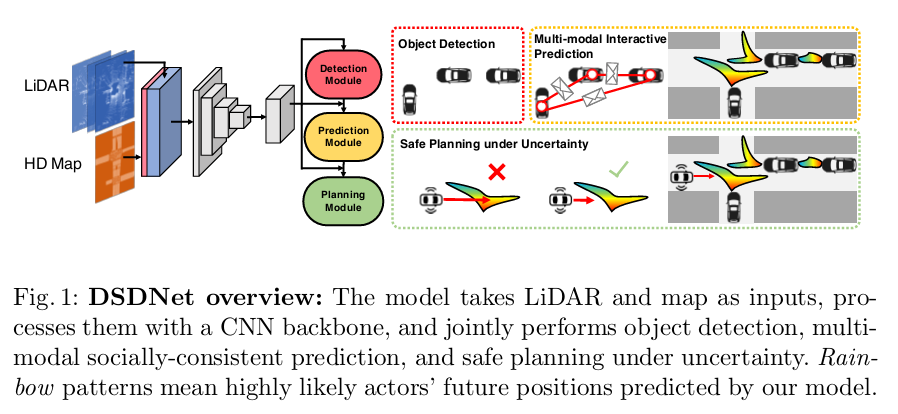
从第一个看,用一个CNN框架,共同细分了三个模块【所以是咋细分的呢?输出三个模块?输出信息呢?】
右边的safe planning under uncertainty很有意思,考虑了socially-consistent prediction
原文:In this work, we further enhance the model capacity with a non-parametric explicit distribution construed over a dense set of trajectory samples.【这个也没看懂 可能是基础问题 non-parametric explicit distribution?】
Structured models and Belief Propagation:
To encode prior knowledge, there is a recent surge of deep structured models, which use deep neural networks (DNNs) to provide the energy terms of a probabilistic graphical models (PGMs).
进入Method,这一部分的方法特别长(主要我想理解 所以有点想解释清楚),最好对着论文看比较好...
框架 - backbone
整个框架的输入:We rasterize the lanes with different semantics into different channels and concatenate them with 3D LiDAR tensor to form our input representation.
将不同的semantics与3D LiDAR tensor整合起来,整合得到的3D tensor再通过深度卷积网络去计算出a backbone feature map \(F \in \mathbb R{^{H \times W \times C}}\),使用两个卷积网络分开F,一个是识别位置上是否有其他actor,其余一个是返回每个actor的位置,大小,方位和速度。再讲这个feature map作为prediction和planning modules 的输入去生成actors' 行为分布和safe planning maneuver.
多社会模型概率预测? - Probabilistic Multimodal Social Prediction
(不知道怎么翻译这个小标题了) 为了计划安全的行驶行为,我们就得预测其他的actors是什么行为。 we represent their possible future behavior using a trajectory defined as a sequence of 2D waypoints on birds eye view sampled at \(T\) discrete timestamps.
️将输出参数化:每当一个测量周期就更新一次所有actors'概率,那么概率是怎么表示的呢?\(s_i \in \mathbb R^{T \times 2}\) be the future trajectory of the i-th actor. 这是一个单独的整个\(p(s_1,\ldots , s_N|X)\),这个整体的联合概率没有高效的计算方式。
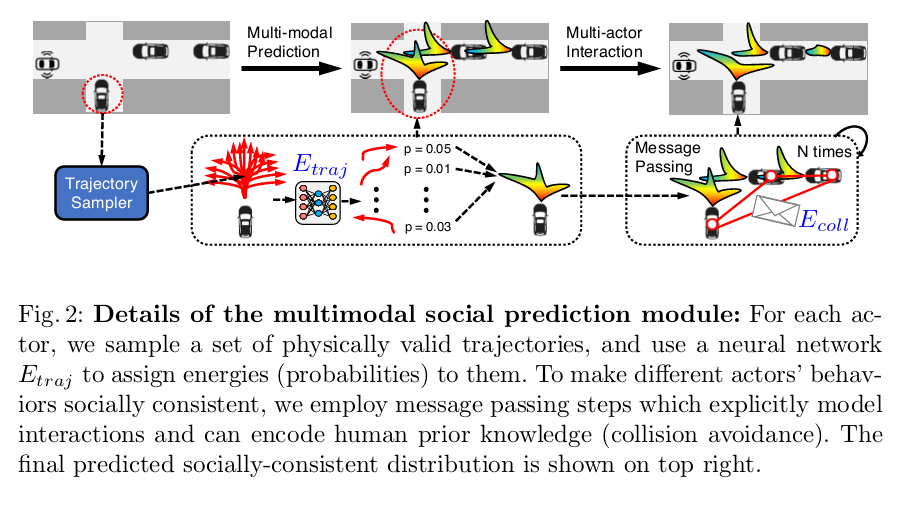
️对所有的agent未来预测行为建模:Here, we propose to approximate this high-dimensional continuous space with a finite number of samples. 所以本文采用的是采样的方法 randomly sample K possible future trajectory. 为确保采样的diverse, dense and physically plausible(离散又密集?diverse and dense?奇怪点) we follow the Neural Motion Planner (NMP) and use a combination of straight, circle and clothoid curves. 总公式如下:
\]
式子中w是学习的参数,X是传感器原始数据,Z是actors' 所有可能的状态。\(Z=\sum exp(-E(\hat s_1^{k_1}, \ldots,s_N^{k_N}))\) 这里为了让整个框架有可解释性,就像人们驾驶车的感觉和交规方面。比如,我们会尽可能的smoothly along the road and avoid collision with each other. Therefore, we decompose the energy E into two terms.(这里的energy E 在MIT老教授的线性代数里正定也看到过 energy test,但是实际的意义到底是什么呢?能量?还是就是一种cost function的表示?)
\]
N是检测的agent总数,w还是学习到的参数
因为前部分的\(E_{traj}\)很难定义,所以这里使用了一层神经网络去学习,输入:传感器数据\(X\)和计划好的路径\(s_i\),输出a scalar value.
下图是更为详细的解释和框架图:

️Message Passing inference:we thus conduct marginal inference over the joint distribution. (这里的marginal inference就不是很懂了?) 我们使用sum-product message passing去预测每一个actor的边缘分布,然后再将其他actors的影响marginalization. 这样得出的边缘概率\(p(s_i|X,w)\)反映出了actor行为的不确定性和multimodality(这个词也不懂),and will be leveraged by our planner. 在每一次迭代行为里更新每个actor \((s_i)\)
\]
这个式子中的\(m_{ij}\)是我一直疑惑的 为什么message可以直接这样表示 或者说这个message的格式信息?想要表达的东西?原文中 \(m_{ij}\) is the message sent from actor i to actor j and \(\propto\) means equal up to a normalization constant. 这个消息传输的过程就是 actors之间互相交流他们未来intention \(s_i\) and how probable those intentions are \(E_{traj}(s_i)\) 而碰撞的可以帮助不同的额actors之间coordinate intentions,这样就算行为复杂也不会产生碰撞。经过消息的传递迭代后,我们可以得出大概的边界概率如下:
\]
在不确定情况下安全的运动规划
The motion planning module fulfills our final goal, that is, navigating towards a destination while avoiding collision and obeying traffic rules. 所以为了量化这个目标,我们构建了cost function C, 更低的cost意味着这条路更好,构建完成后 planning的工作就是找到min cost的trajectory
\]
while \(\tau^*\) the planned optimal trajectory and \(\rm P\) the set of physically realizable trajectories 满足车辆的动力学模型
再到整个Planning Cost
\]
\(C_{traj}\)就是用神经网络学习到的车辆轨迹,\(E_{traj}\)是预测模块,使用了trajectory feature和ROIAlign 从backbone 特征图中提取出来并计算this scalar cost value. \(C_{coll}(\tau,s_i)=\lambda\) if \(\tau\) and \(s_i\) colide, and 0 otherwise,也就是就散得到的planned optimal trajectory如果和任何一个actor撞到了都是不可行的,这样就能保证车辆行驶安全
学习
这一部分我们直接将所有的模型(backbone, detection, prediction and planning)通过一个multi-class loss 联合训练
\]
\(\alpha\)和\(\beta\)是常量超参数,这样的multi-task loss can fully exploit the supervision for each task and help the training. 如果只有前者的\(\mathcal{L}_{planning}\) 那就损失了预测和检测的更为合理的学习,更具可解释性?(但是这样不会重复吗?planning那块的学习就包含住了预测检测的一部分)
Limitation
自己的一些想法
【论文阅读】DSDNet Deep Structured self-Driving Network的更多相关文章
- 【论文阅读】Deep Mixture of Diverse Experts for Large-Scale Visual Recognition
导读: 本文为论文<Deep Mixture of Diverse Experts for Large-Scale Visual Recognition>的阅读总结.目的是做大规模图像分类 ...
- 【论文阅读】Deep Adversarial Subspace Clustering
导读: 本文为CVPR2018论文<Deep Adversarial Subspace Clustering>的阅读总结.目的是做聚类,方法是DASC=DSC(Deep Subspace ...
- 【CV论文阅读】Deep Linear Discriminative Analysis, ICLR, 2016
DeepLDA 并不是把LDA模型整合到了Deep Network,而是利用LDA来指导模型的训练.从实验结果来看,使用DeepLDA模型最后投影的特征也是很discriminative 的,但是很遗 ...
- 论文阅读:Relation Structure-Aware Heterogeneous Information Network Embedding
Relation Structure-Aware Heterogeneous Information Network Embedding(RHINE) (AAAI 2019) 本文结构 (1) 解决问 ...
- 论文阅读 DynGEM: Deep Embedding Method for Dynamic Graphs
2 DynGEM: Deep Embedding Method for Dynamic Graphs link:https://arxiv.org/abs/1805.11273v1 Abstract ...
- 【论文阅读】Deep Mutual Learning
文章:Deep Mutual Learning 出自CVPR2017(18年最佳学生论文) 文章链接:https://arxiv.org/abs/1706.00384 代码链接:https://git ...
- 三维目标检测论文阅读:Deep Continuous Fusion for Multi-Sensor 3D Object Detection
题目:Deep Continuous Fusion for Multi-Sensor 3D Object Detection 来自:Uber: Ming Liang Note: 没有代码,主要看思想吧 ...
- 【论文阅读】Deep Clustering for Unsupervised Learning of Visual Features
文章:Deep Clustering for Unsupervised Learning of Visual Features 作者:Mathilde Caron, Piotr Bojanowski, ...
- [论文阅读]VERY DEEP CONVOLUTIONAL NETWORKS FOR LARGE-SCALE IMAGE RECOGNITION(VGGNet)
VGGNet由牛津大学的视觉几何组(Visual Geometry Group)提出,是ILSVRC-2014中定位任务第一名和分类任务第二名.本文的主要贡献点就是使用小的卷积核(3x3)来增加网络的 ...
随机推荐
- GPU加速库AmgX
GPU加速库AmgX AmgX提供了一条简单的途径来加速NVIDIA GPU上的核心求解器技术.AmgX可以为模拟的计算密集型线性求解器部分提供高达10倍的加速度,特别适合于隐式非结构化方法. 它是一 ...
- Caffe实现概述
Caffe实现概述 目录 一.caffe配置文件介绍 二.标准层的定义 三.网络微调技巧 四.Linux脚本使用及LMDB文件生成 五.带你设计一个Caffe网络,用于分类任务 一.caffe配置文件 ...
- CodeGen融合核心关系循环扩展
CodeGen融合核心关系循环扩展 Expansion Tokens <HARMONYCORE_RELATION_NAME> 插入当前关系的名称.关系名称将自动生成,但可以由Harmony ...
- pytest skip的使用
skip跳过用例(无条件跳过,不运行用例) 使用方法: 1.使用跳过装饰器 class TestClass(): @pytest.mark.skip(reason='no way of current ...
- 【NX二次开发】创建老版的基准平面uf5374
使用uf5374() 源码: double dP1[3] = { 0.0,0.0,0.0 }; double dP2[3] = { 0.0,1.0,0.0 }; double dP3[3] = { 0 ...
- 【疑难杂症】高版本UG从老UI中获取汉字字符串后乱码的问题
结论:NXstring转换为char类型的时候导致了乱码 措施: 改前:string strA=Test001::test001StrName->ItemValue().GetText(); / ...
- go语言的排序和搜索(转载)
http://studygolang.com/articles/1598 go语言的排序和搜索 晚上准备动手写点 go 的程序的时候,想起 go 如何排序的问题.排序 sort 是个基本的操作,当然搜 ...
- 会点自动化就要25k? 现在年轻人这么浮躁吗
面试中一问元素定位就对答如流.一问实际项目框架如何搭建就避重就轻.含糊其辞,这样的自动化实战能力也能拿25K?静待下文: 一.为什么现在自动化测试工资那么高呢? 结合现在的职场环境与企业用人需求,自动 ...
- Selective Kernel Networks
摘要:在标准的卷积神经网络(CNNs)中,每一层的人工神经元的感受野被设计成具有相同的大小.众所周知,视觉皮层神经元的感受野大小受刺激的调节,但在构建cnn时却很少考虑到这一点.我们在神经网络中提出了 ...
- 「10.17-10.18」liu_runda’s模拟
暂咕 $day1$ A. 位运算 分类讨论,贡献分离. B. 集合论 维护类似时间戳的东西 C. 连连看 考场思路太局限了,考虑容斥. 我们可以看出两个方块能作出贡献,实际上是一个极大联通块(白块)所 ...