强化学习实战 | 表格型Q-Learning玩井字棋(二)
在 强化学习实战 | 表格型Q-Learning玩井字棋(一)中,我们构建了以Game() 和 Agent() 类为基础的框架,本篇我们要让agent不断对弈,维护Q表格,提升棋力。那么我们先来盘算一下这几个问题:
- Q1:作为陪练的一方,策略上有什么要求吗?
- A1:有,出棋所导致的状态要完全覆盖所有可能状态。满足此条件下,陪练的棋力越强(等同于环境越严苛),agent训练的效果越好。AlphaGo的例子告诉我们,陪练的策略也是可以分阶段调整的:前期先用人类落子的预测模型当陪练,中后期让agent自我博弈。在井字棋的例子中,环境较简单,可以直接让agent自我博弈,采用 ε-greedy 策略(贪心地选择Q值最大的动作执行,并以 ε 的概率试探其他的动作)即可实现可能状态的覆盖。
- Q2:采用自我博弈的方式,也就意味着,在陪练动作前,也要调用Q表格,是吗?
- A2:是,不仅是调用,如果当前状态不在Q表格中,还要往Q表格中新增状态,否则无法将执行 ε-greedy 策略。
- Q3:而且陪练动作之后,还要更新Q表格?
- A3:是。
- Q4:环境的定义是以一方的视角分配奖励的,对于陪练来说,不能简单地调用Q表格进行决策吧?假设agent是蓝方,陪练是红方,直接用Q表进行决策,那么红方就是以自身落蓝字进行考虑的,所考虑的状态完全是非法的——例如场上仅有一个蓝子,此刻又是待落蓝子。
- A4:对,不能简单调用!在陪练动作前,要把视角翻转——如果当前状态是 [1, -1, 0, 0, 0, 0, 0, 0, 1],翻转就是把当前状态视作 [-1, 1, 0, 0, 0, 0, 0, 0, -1],再考虑自身如何落蓝子。
再回想一下Q-Learning算法:
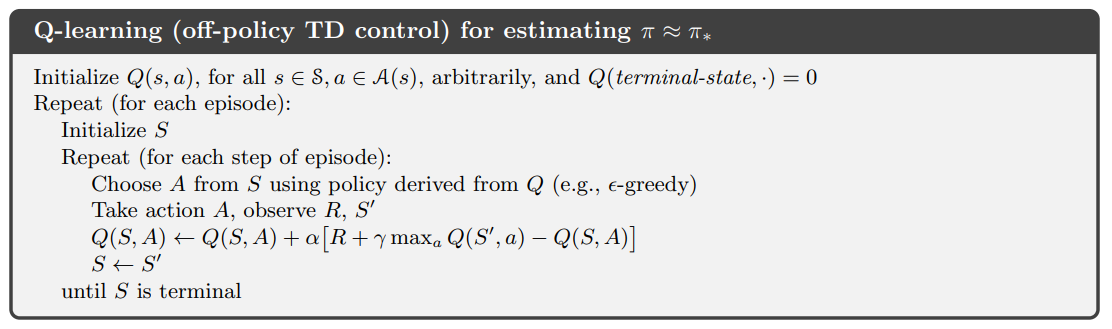
细节也就逐渐清晰了,我们要实现的目标如下:
- 维护记录蓝方上一状态,动作及奖励的变量组 lastState_blue,lastAction_blue,lastReward_blue;维护记录红方上一状态,动作及奖励的变量组 lastState_red,lastAction_red,lastReward_red。(要时刻注意,一方行动之后的状态并不是自身的后继状态,而是进入对手的新状态,只有当自身再次行动时,此时的状态才是后继状态:S0blue → A0blue → S0red → A0red → S1blue → A1blue → S1red → A1red → S2blue → …,Q表中的状态数是4520,大于这个数字说明代码一定是哪里写错了)
- 构建一个 ε-greedy 策略函数 epsilon_greedy(env),并区分蓝/红方,红方(陪练)动作时,把当前状态翻转。
- 构建一个往Q表格新增状态的函数 addNewState(env), 并区分蓝/红方,红方调用时,把当前状态翻转。
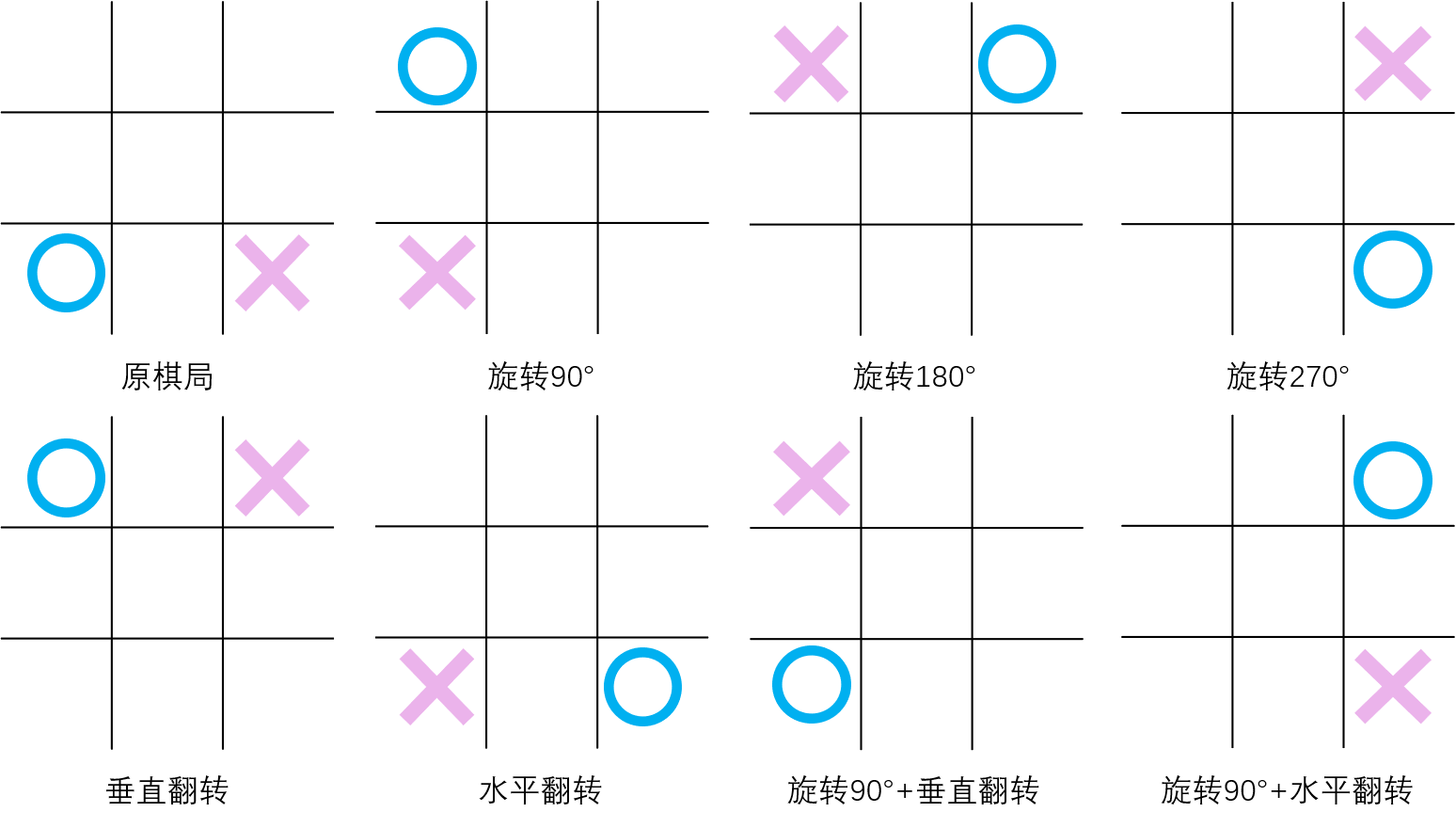
- 构建一个更新Q表格状态价值的函数 updateQtable(env),可以选择锁定蓝方视角:蓝方行动前调用,也可以选择蓝方和红方视角下都调用(红方调用时需要翻转状态),可以想到,这样的双向调用在相同轮次内更新的状态更多。另一个加快更新的方法是考虑等价的棋局,翻转或旋转运动可以创造等价的7个棋局(见下图),分别是:旋转90°,旋转180°,旋转270° ,垂直翻转,水平翻转,旋转90°+垂直翻转,旋转90°+水平翻转。双向更新+等价棋局同步更新,这样我们就能在一轮对局中更新 2×8=16 个Q值,大大提高了更新速度。
秉着“先跑通,再优化”的信条,先实现蓝红两方的双向更新,等价棋局的更新下次一定。整体代码如下:


import gym
import random
import time # 查看所有已注册的环境
# from gym import envs
# print(envs.registry.all()) def str2tuple(string): # Input: '(1,1)'
string2list = list(string)
return ( int(string2list[1]), int(string2list[4]) ) # Output: (1,1) class Game():
def __init__(self, env):
self.INTERVAL = 0 # 行动间隔
self.RENDER = False # 是否显示游戏过程
self.first = 'blue' if random.random() > 0.5 else 'red' # 随机先后手
self.currentMove = self.first
self.env = env
self.agent = Agent() def switchMove(self): # 切换行动玩家
move = self.currentMove
if move == 'blue': self.currentMove = 'red'
elif move == 'red': self.currentMove = 'blue' def newGame(self): # 新建游戏
self.first = 'blue' if random.random() > 0.5 else 'red'
self.currentMove = self.first
self.env.reset()
self.agent.reset() def run(self): # 玩一局游戏
self.env.reset() # 在第一次step前要先重置环境,不然会报错
while True:
print(f'--currentMove: {self.currentMove}--')
self.agent.updateQtable(self.env, self.currentMove, False) if self.currentMove == 'blue':
self.agent.lastState_blue = self.env.state.copy()
elif self.currentMove == 'red':
self.agent.lastState_red = self.agent.overTurn(self.env.state) # 红方视角需将状态翻转 action = self.agent.epsilon_greedy(self.env, self.currentMove)
if self.currentMove == 'blue':
self.agent.lastAction_blue = action['pos']
elif self.currentMove == 'red':
self.agent.lastAction_red = action['pos'] state, reward, done, info = self.env.step(action)
if self.currentMove == 'blue':
self.agent.lastReward_blue = reward
elif self.currentMove == 'red':
self.agent.lastReward_red = -1 * reward if done: self.agent.updateQtable(self.env, self.currentMove, True) if self.RENDER: self.env.render()
self.switchMove()
time.sleep(self.INTERVAL)
if done:
self.newGame()
if self.RENDER: self.env.render()
time.sleep(self.INTERVAL)
break class Agent():
def __init__(self):
self.Q_table = {}
self.EPSILON = 0.05
self.ALPHA = 0.5
self.GAMMA = 1 # 折扣因子
self.lastState_blue = None
self.lastAction_blue = None
self.lastReward_blue = None
self.lastState_red = None
self.lastAction_red = None
self.lastReward_red = None def reset(self):
self.lastState_blue = None
self.lastAction_blue = None
self.lastReward_blue = None
self.lastState_red = None
self.lastAction_red = None
self.lastReward_red = None def getEmptyPos(self, env_): # 返回空位的坐标
action_space = []
for i, row in enumerate(env_.state):
for j, one in enumerate(row):
if one == 0: action_space.append((i,j))
return action_space def randomAction(self, env_, mark): # 随机选择空格动作
actions = self.getEmptyPos(env_)
action_pos = random.choice(actions)
action = {'mark':mark, 'pos':action_pos}
return action def overTurn(self, state): # 翻转状态
state_ = state.copy()
for i, row in enumerate(state_):
for j, one in enumerate(row):
if one != 0: state_[i][j] *= -1
return state_ def addNewState(self, env_, currentMove): # 若当前状态不在Q表中,则新增状态
state = env_.state if currentMove == 'blue' else self.overTurn(env_.state) # 如果是红方行动则翻转状态
if str(state) not in self.Q_table:
self.Q_table[str(state)] = {}
actions = self.getEmptyPos(env_)
for action in actions:
self.Q_table[str(state)][str(action)] = 0 def epsilon_greedy(self, env_, currentMove): # ε-贪心策略
state = env_.state if currentMove == 'blue' else self.overTurn(env_.state) # 如果是红方行动则翻转状态
Q_Sa = self.Q_table[str(state)]
maxAction, maxValue, otherAction = [], -100, []
for one in Q_Sa:
if Q_Sa[one] > maxValue:
maxValue = Q_Sa[one]
for one in Q_Sa:
if Q_Sa[one] == maxValue:
maxAction.append(str2tuple(one))
else:
otherAction.append(str2tuple(one)) try:
action_pos = random.choice(maxAction) if random.random() > self.EPSILON else random.choice(otherAction)
except: # 处理从空的otherAction中取值的情况
action_pos = random.choice(maxAction)
action = {'mark':currentMove, 'pos':action_pos}
return action def updateQtable(self, env_, currentMove, done_): judge = (currentMove == 'blue' and self.lastState_blue is None) or \
(currentMove == 'red' and self.lastState_red is None)
if judge: # 边界情况1:若agent无上一状态,说明是游戏中首次动作,那么只需要新增状态就好 无需更新Q值
self.addNewState(env_, currentMove)
return if done_: # 边界情况2:若当前状态S_是终止状态,则无需把S_添加至Q表格中,并直接令maxQ_S_a = 0
S = self.lastState_blue if currentMove == 'blue' else self.lastState_red
a = self.lastAction_blue if currentMove == 'blue' else self.lastAction_red
R = self.lastReward_blue if currentMove == 'blue' else self.lastReward_red
print('lastState S:\n', S)
print('lastAction a: ', a)
print('lastReward R: ', R)
maxQ_S_a = 0
self.Q_table[str(S)][str(a)] = (1 - self.ALPHA) * self.Q_table[str(S)][str(a)] \
+ self.ALPHA * (R + self.GAMMA * maxQ_S_a)
print('Q(S,a) = ', self.Q_table[str(S)][str(a)])
return # 其他情况下:Q表无当前状态则新增状态,否则直接更新Q值
self.addNewState(env_, currentMove)
S_ = env_.state if currentMove == 'blue' else self.overTurn(env_.state)
S = self.lastState_blue if currentMove == 'blue' else self.lastState_red
a = self.lastAction_blue if currentMove == 'blue' else self.lastAction_red
R = self.lastReward_blue if currentMove == 'blue' else self.lastReward_red
Q_S_a = self.Q_table[str(S_)]
maxQ_S_a = -100
for one in Q_S_a:
if Q_S_a[one] > maxQ_S_a:
maxQ_S_a = Q_S_a[one]
print('lastState S:\n', S)
print('State S_:\n', S_)
print('lastAction a: ', a)
print('lastReward R: ', R)
self.Q_table[str(S)][str(a)] = (1 - self.ALPHA) * self.Q_table[str(S)][str(a)] \
+ self.ALPHA * (R + self.GAMMA * maxQ_S_a)
print('Q(S,a) = ', self.Q_table[str(S)][str(a)])
print('\n') env = gym.make('TicTacToeEnv-v0')
game = Game(env)
for i in range(100000):
print('episode', i)
game.run()
Q_table = game.agent.Q_table
测试
先跑个10万局游戏,看看大体的趋势对不对。
项目1:Q表格的状态数

比4520要小——这是可以理解的,因为agent有1- ε的大概率选择Q值高的动作,仅有 ε会尝试别的动作。要访问到余下的状态,可以加大 ε 让agent多尝试,或是干脆让陪练随机动作,或是设置等价棋局同步更新以提高训练速度。
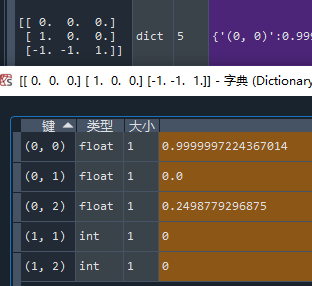
项目2:查看初始状态
每个动作的Q值应该都差不多,而且应该呈现出对称性
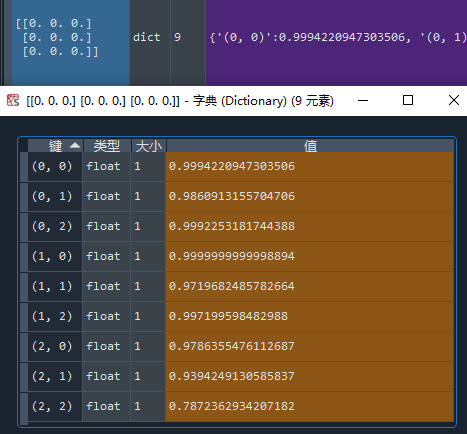
与预测不完全一致,毕竟(0,0)与(2,2)动作后是等价局面,二者Q值应该接近,但也可以接受,毕竟没有进行等价棋局的同步更新。
项目3:查看早期状态
早期状态应该能显示出某些动作具有相对低的Q值——“走这一步你大概就输了”。
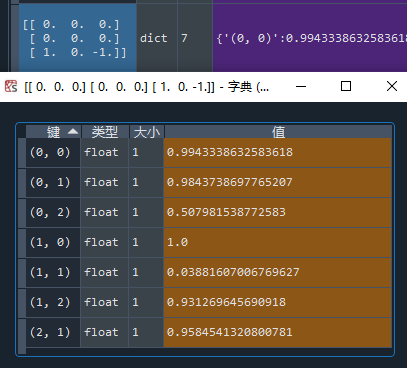
因为有学习率的存在,Q值只会无限接近1,这里显示成了1,说明无限接近到float也显示不出来了,(1,0)是必胜的一步,而选择(1,1)约等于自杀。
项目4:查看中后期的状态
中后期的状态应该能显示出某些动作是必赢 / 必输的。
“走哪里都输”:

“走这一步,必赢”:
走(0,0)确实是必赢的,你看出来了吗?
小结
测试过后,大体的趋势没有问题,但我在翻查Q表格的时候发现,其实很多状态都没有更新,Q表格也没有覆盖所有合法状态。这些问题,就留到下一节来解决吧!
说一说踩的坑
- 本以为翻转状态可以直接优雅地 state = -1 * state,但转换成字符判定时却遇到了问题,因为numpy.array的元素 0 * -1 = - 0,转换成字符串后 '0' 不等于 '-0'!解决方法:只更改 1 和 -1。
- 深拷贝与浅拷贝的问题,self.agent.lastState_blue = self.env.state,不是直接赋值,而是赋予了 self.env.state 的引用,所以 self.agent.lastState_blue 的值是变化的,然后导致一系列的错误。解决方法:self.agent.lastState_blue = self.env.state.copy()。
- 有两个边界情况要注意,一是首次动作时没有上一状态;二是动作后若游戏结束,要直接更新Q值。
强化学习实战 | 表格型Q-Learning玩井字棋(二)的更多相关文章
- 强化学习实战 | 表格型Q-Learning玩井子棋(三)优化,优化
在 强化学习实战 | 表格型Q-Learning玩井字棋(二)开始训练!中,我们让agent"简陋地"训练了起来,经过了耗费时间的10万局游戏过后,却效果平平,尤其是初始状态的数值 ...
- 强化学习实战 | 表格型Q-Learning玩井字棋(四)游戏时间
在 强化学习实战 | 表格型Q-Learning玩井字棋(三)优化,优化 中,我们经过优化和训练,得到了一个还不错的Q表格,这一节我们将用pygame实现一个有人机对战,机机对战和作弊功能的井字棋游戏 ...
- 强化学习实战 | 表格型Q-Learning玩井字棋(一)
在 强化学习实战 | 自定义Gym环境之井子棋 中,我们构建了一个井字棋环境,并进行了测试.接下来我们可以使用各种强化学习方法训练agent出棋,其中比较简单的是Q学习,Q即Q(S, a),是状态动作 ...
- 强化学习系列之:Deep Q Network (DQN)
文章目录 [隐藏] 1. 强化学习和深度学习结合 2. Deep Q Network (DQN) 算法 3. 后续发展 3.1 Double DQN 3.2 Prioritized Replay 3. ...
- 强化学习实战 | 自定义Gym环境之井字棋
在文章 强化学习实战 | 自定义Gym环境 中 ,我们了解了一个简单的环境应该如何定义,并使用 print 简单地呈现了环境.在本文中,我们将学习自定义一个稍微复杂一点的环境--井字棋.回想一下井字棋 ...
- 强化学习实战 | 自定义Gym环境之扫雷
开始之前 先考虑几个问题: Q1:如何展开无雷区? Q2:如何计算格子的提示数? Q3:如何表示扫雷游戏的状态? A1:可以使用递归函数,或是堆栈. A2:一般的做法是,需要打开某格子时,再去统计周围 ...
- TicTacToe井字棋 by reinforcement learning
对于初学强化学习的同学,数学公式也看不太懂, 一定希望有一些简单明了的代码实现加强对入门强化学习的直觉认识,这是一篇初级入门代码, 希望能对你们开始学习强化学习起到基本的作用. 井字棋具体玩法参考百度 ...
- [游戏学习22] MFC 井字棋 双人对战
>_<:太多啦,感觉用英语说的太慢啦,没想到一年做的东西竟然这么多.....接下来要加速啦! >_<:注意这里必须用MFC和前面的Win32不一样啦! >_<:这也 ...
- 强化学习实战 | 自定义Gym环境
新手的第一个强化学习示例一般都从Open Gym开始.在这些示例中,我们不断地向环境施加动作,并得到观测和奖励,这也是Gym Env的基本用法: state, reward, done, info = ...
随机推荐
- Python super(Todo,self).__init__() TypeError: super() argument 1 must be type, not classobj
示例如下 class A(): def __init__(self):pass class B(A): def __init__(self): super(A, self).__init__() 当调 ...
- 🏆【JVM深层系列】「云原生时代的Java虚拟机」针对于GraalVM的技术知识脉络的重塑和探究
GraalVM 背景 新.旧编程语言的兴起躁动,说明必然有其需求动力所在,譬如互联网之于JavaScript.人工智能之于Python,微服务风潮之于Golang等等.大家都清楚不太可能有哪门语言能在 ...
- 三(二)、AOP配置
一.AOP的配置(注解) 步骤一.导入jar包: 处理那5个jar包之外,还需要导入: aopalliance aspectjweaver spring-aop spring-aspects 步骤二. ...
- webpack 打包图片资源
webpack 打包图片资源 /** * loader: 1. 下载 2. 使用(配置) * plugins:1. 下载 2. 引入 3.使用 */ // 用来拼接绝对路径的方法 const {res ...
- 几个你不知道的dubbo注册中心细节
你会正确配置backup地址吗? 在配置dubbo注册中心时,一般会这样写 dubbo.registry.protocol=zookeeper dubbo.registry.address=127.0 ...
- Python基础(使用模块)
#!/usr/bin/env python3 # -*- coding: utf-8 -*- ' a test module ' __author__ = 'Michael Liao' import ...
- 菜鸡的Java笔记 第三十七 - java 线程与进程
线程与进程 线程与进程的区别 最早的的时候DOS 系统有一个特点:只要电脑有病毒,那么电脑就死机了,是因为传统的DOS 系统属于单进程的操作系统 ...
- [源码解析] PyTorch 分布式(8) -------- DistributedDataParallel之论文篇
[源码解析] PyTorch 分布式(8) -------- DistributedDataParallel之论文篇 目录 [源码解析] PyTorch 分布式(8) -------- Distrib ...
- [cf1326F]Wise Men
对答案序列求一个高维后缀和,再通过差分将其解出,后者复杂度为$o(n2^{n})$ 对于求后缀和后的结果,即01序列仅要求1处有边(不要求0处没有边),那么也即要求将原图划分为若干条长度给定且没有公共 ...
- win10 如何查看本地连接的WIFI密码
1 在状态栏右侧找到WIFI图标,右键WIFI图标,打开"网路和 Internet"设置 2 切换到 "状态"或"WLAN",找到" ...