am335x system upgrade kernel uart(七)
1 Scope of Document
This document describes UART hardware design, uart driver porting
2 Requiremen
2.1 Function Requirement
Uboot enable uart0 for debug, Kernel enable uart0 uart1 uart2 uart3.
2.2 Performance Requirement
Support common uart rx tx function.
3 Hardware Overview
uart interface,pin map:
// uart 0
AM335X_UART0_RXD
AM335X_UART0_TXD
// uart 1
AM335X_UART1_RXD
AM335X_UART1_TXD
// uart 2
AM335X_UART2_RXD
AM335X_UART2_TXD
// uart 3
AM335X_UART3_RXD
AM335X_UART3_TXD

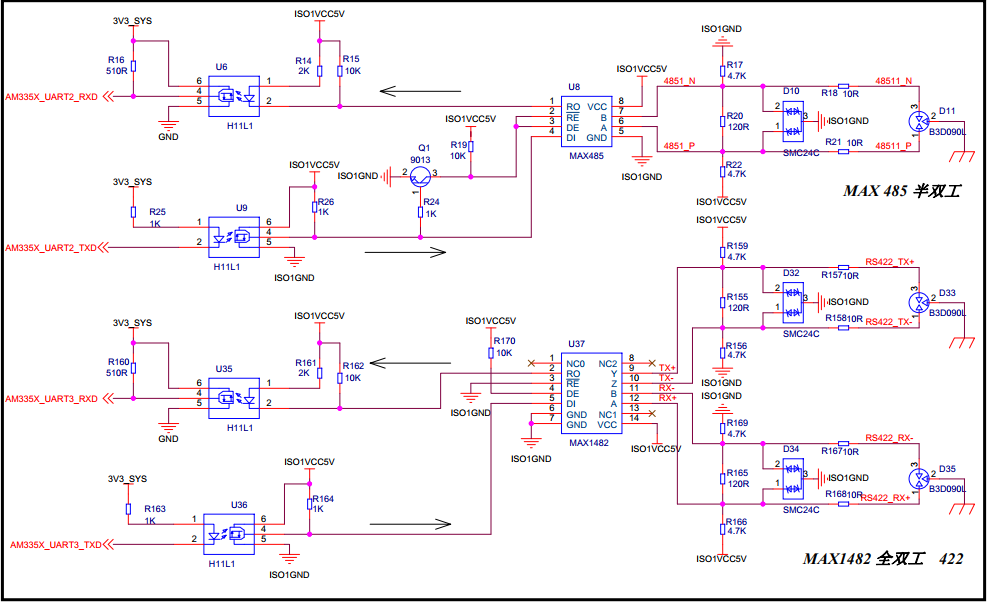
Figure 1 uart interface block diagram
4 Functional Description
4.1 UART DRIVER Overview
The UART Driver enables the UART’s available on the device. The driver configures the UART hardware and interfaces with a number of standard linux tools (ex. stty, minicom, etc.) to enable the configuration and usage of the hardware. The H/W UARTs available will vary by SoC and system configuration.
4.2 UART
4.2.1 Overview
The UART driver can be used to send/receive raw ASCII characters from the User Interface as shown by the below diagram..
4.2.1 User Layer
The UART driver leverages the TTY framework within Linux. This framework uses typical file I/O operations to interact with the UART. This interface allows userspace modules to easily be developed to read/write the /dev/ttyxx to exchange data over the UART. Since this is a very common Linux framework, there are many standard tools that can be used to interact with it. These tools, like stty, minicom, picocom, and many others, can easily be used to exercise a UART for data exchange.

Features
- Exposes UART to User Space via /dev/tty*
- Supports multiple baud rates and UART capabilities
- Hardware Flow Control
5 Porting
5.1 Uboot porting
In uboot default enable debug uart, so do not need to modify.
5.2 Kernel porting
Index: am335x-evm.dts
uart1_pins: pinmux_uart1_pins {
pinctrl-single,pins = <
AM33XX_IOPAD(0x980, PIN_INPUT_PULLUP | MUX_MODE1) /* uart1_rxd.uart1_rxd */
AM33XX_IOPAD(0x984, PIN_OUTPUT_PULLDOWN | MUX_MODE1) /* uart1_txd.uart1_txd */
>;
};
uart2_pins: pinmux_uart2_pins {
pinctrl-single,pins = <
AM33XX_IOPAD(0x92c, PIN_INPUT_PULLUP | MUX_MODE1) /* mii1_txclk.uart2_rxd */
AM33XX_IOPAD(0x930, PIN_OUTPUT_PULLDOWN | MUX_MODE1) /* mii1_rxclk.uart2_txd */
>;
};
uart3_pins: pinmux_uart3_pins {
pinctrl-single,pins = <
AM33XX_IOPAD(0x934, PIN_INPUT_PULLUP | MUX_MODE1) /* mii1_rxd3.uart3_rxd */
AM33XX_IOPAD(0x938, PIN_OUTPUT_PULLDOWN | MUX_MODE1) /* mii1_rxd2.uart3_txd */
>;
};
&uart1 {
pinctrl-names = "default";
pinctrl-0 = <&uart1_pins>;
status = "okay";
};
&uart2 {
pinctrl-names = "default";
pinctrl-0 = <&uart2_pins>;
status = "okay";
};
&uart3 {
pinctrl-names = "default";
pinctrl-0 = <&uart3_pins>;
status = "okay";
};
6 Follow-up
Uart loop test code:
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <unistd.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <termios.h>
#include <errno.h>
#include <pthread.h>
#include <sys/ioctl.h>
#define FALSE 1
#define TRUE 0
int fd=-1;
char buff[512];
int speed_arr[] = { B115200, B57600, B38400, B19200, B9600, B4800,
B2400, B1200};
int name_arr[] = {115200, 57600, 38400, 19200, 9600, 4800, 2400, 1200};
#define debugnum(data,len,prefix) \
{ \
unsigned int i; \
for (i = 0;i < len;i++) { \
if(prefix) \
printf("0x%02x ",data[i]); \
else \
printf("%02x ",data[i]); \
} \
}
void set_speed(int fd, int speed)
{
int i;
int status;
struct termios Opt;
tcgetattr(fd, &Opt);
for ( i= 0; i < sizeof(speed_arr) / sizeof(int); i++)
{
if (speed == name_arr[i])
{
tcflush(fd, TCIOFLUSH);
cfsetispeed(&Opt, speed_arr[i]);
cfsetospeed(&Opt, speed_arr[i]);
status = tcsetattr(fd, TCSANOW, &Opt);
if (status != 0)
perror("tcsetattr fd1");
return;
}
tcflush(fd,TCIOFLUSH);
}
}
int set_Parity(int fd,int databits,int stopbits,int parity)
{
struct termios options;
if ( tcgetattr( fd,&options) != 0)
{
perror("SetupSerial 1");
return(FALSE);
}
options.c_cflag &= ~CSIZE;
switch (databits)
{
case 7:
options.c_cflag |= CS7;
break;
case 8:
options.c_cflag |= CS8;
break;
default:
fprintf(stderr,"Unsupported data size\n");
return (FALSE);
}
switch (parity)
{
case 'n':
case 'N':
options.c_cflag &= ~PARENB;
options.c_iflag &= ~INPCK;
break;
case 'o':
case 'O':
options.c_cflag |= (PARODD | PARENB);
options.c_iflag |= INPCK;
break;
case 'e':
case 'E':
options.c_cflag |= PARENB;
options.c_cflag &= ~PARODD;
options.c_iflag |= INPCK;
break;
case 'S':
case 's':
options.c_cflag &= ~PARENB;
options.c_cflag &= ~CSTOPB;
break;
default:
fprintf(stderr,"Unsupported parity\n");
return (FALSE);
}
switch (stopbits)
{
case 1:
options.c_cflag &= ~CSTOPB;
break;
case 2:
options.c_cflag |= CSTOPB;
break;
default:
fprintf(stderr,"Unsupported stop bits\n");
return (FALSE);
}
options.c_iflag &= ~(IGNBRK|BRKINT|PARMRK|ISTRIP|INLCR|IGNCR|ICRNL|IXON);
options.c_oflag &= ~OPOST;
options.c_lflag &= ~(ECHO|ECHONL|ICANON|ISIG|IEXTEN);
/* Set input parity option */
if (parity != 'n')
options.c_iflag |= INPCK;
options.c_cc[VTIME] = 150; // 15 seconds
options.c_cc[VMIN] = 0;
tcflush(fd,TCIFLUSH); /* Update the options and do it NOW */
if (tcsetattr(fd,TCSANOW,&options) != 0)
{
perror("SetupSerial 3");
return (FALSE);
}
return (TRUE);
}
void receivethread(void)
{
int nread;
while(1)
{
if((nread = read(fd,buff,100))>0) //接收数据
{
printf("[RECEIVE] Len is %d,content is :\n",nread);
buff[nread]='\0';
printf("%s\n",buff);
}
usleep(100/**1000*/);
}
return;
}
int main(int argc, char *argv[])
{
char str[500];
pthread_t receiveid;
int c, ctrlbits;
/*
参数个数小于1则返回,按如下方式执行:
./uart_test /dev/ttyAT1
*/
if (argc < 2) {
printf("Useage: %s dev\n", argv[0]);
exit(0);
}
printf("test\n");
fd = open(argv[1], O_RDWR);
if (fd < 0){
printf("open device %s faild\n", argv[1]);
exit(0);
}
set_speed(fd,115200); //设置串口波特率
set_Parity(fd,8,1,'N'); //设置8位数据位,1位停止位,无校验等其他设置。
pthread_create(&receiveid,NULL,(void*)receivethread,NULL);//创建接收线程
while(1)
{
printf("Please Input string to send to %s\n:",argv[1]);
scanf("%s", str);
if(strlen(str)>0){
//发送数据
write(fd, str, strlen(str));
write(fd, "\n", strlen("\n"));
usleep(200*1000);
}
}
close(fd);
exit(0);
}
am335x system upgrade kernel uart(七)的更多相关文章
- am335x system upgrade kernel tf(五)
1 Scope of Document This document describes TF hardware design 2 Requiremen 2.1 Functi ...
- am335x system upgrade kernel ethernet(四)
1 Scope of Document This document describes ethernet hardware design and porting KZS8081 to ubo ...
- am335x system upgrade kernel gpio(九)
1 Hardware Overview gpio interface,pin map: AM335X_I2C0_W_C----------------------MCASP0_AXR1 /* ...
- am335x system upgrade kernel can(八)
1 Scope of Document This document describes can bus hardware design and can bus driver developm ...
- am335x system upgrade kernel i2c rtc eeprom(六)
1 Scope of Document This document describes i2c bus hardware design and support i2c-devices: ee ...
- am335x system upgrade kernel ec20 simcom7600ce(十一)
1 Scope of Document This document describes 4G hardware design, support quectel ec20 4G module/ ...
- am335x system upgrade kernel usb stroage(十)
1 Scope of Document This document describes USB hardware design, support stardard usb2.0 port o ...
- am335x system upgrade kernel f-ram fm25l16b(十六)
1 Scope of Document This document describes SPI F-RAM hardware design 2 Requiremen 2.1 ...
- am335x system upgrade kernel emmc(十八)
1 Scope of Document This document describes EMMC hardware design 2 Requiremen 2.1 Func ...
随机推荐
- 协议——IIC
I²C即Inter-Integrated Circuit(集成电路总线),它是一种串行通信总线,使用多主从架构,由飞利浦公司在1980年代设计出来的一种简单.双向.二线制总线标准.多用于主机和从机在数 ...
- Android--Bitmap处理、圆角、圆形
/** * 转换图片成圆形 * * @param bitmap * 传入Bitmap对象 * @return */ public static Bitmap toRoundBitmap(Bitmap ...
- Loader ,URLLoader ,URLStream的区别
AS3代码 (1) Loader Loader 类可用于加载 SWF 文件或图像(JPG.PNG 或 GIF)文件. 使用 load() 方法来启动加载. 被加载的显示 ...
- Jenkins + GitLab + SpringBoot 实现持续集成脚本
Linux脚本 #!/bin/bash jar_name=hq-api.jar cd /usr/local/app/hq-api echo "Stopping SpringBoot Appl ...
- Dubbo学习摘录(一)
Dubbo基于自定义配置,实现自己的Bean. 通常,完成一个自定义配置需要以下步骤: 设计配置属性和JavaBean: 编写XSD文件: 编写NamespaceHandler和BeanDefinit ...
- Lucene BooleanQuery中的Occur.MUST与Occur.Should
https://www.cnblogs.com/weipeng/archive/2012/04/18/2455079.html 1. 多个MUST的组合不必多说,就是交集 2. MUST和SH ...
- Arduino 计算机视觉系统概述
计算机视觉系统概述 计算机视觉系统是最近比较热门的研究领域,今天开始给大家介绍下计算机视觉相关的知识. 视觉是人的所有感官中最敏感的一种,人的视觉可以感知环境,而机器的视觉却很难感知环境 为了解决计算 ...
- 匿名对象序列化为XML
using System; using System.Collections.Generic; using System.Linq; using System.Text; using System.X ...
- C#破解dll
使用反编译工具对dll文件进行反编译,找到校验过期的相关代码,反编译工具可以使用ILSpy或Reflector; 使用ildasm.exe工具将dll导出成il文本文件,在该文件中找到相关的代码进行修 ...
- SAP 2019 TechEd Key Note解读:云时代下SAP从业人员如何做二次开发?
刚刚过去的在巴塞罗那举行的2019 SAP TechEd,SAP照例向全球广大的SAP生态圈从业者们传达了一些重要的信息,其中一条为:Building Extensions for the Intel ...