2019牛客多校第八场 F题 Flowers 计算几何+线段树
2019牛客多校第八场 F题 Flowers
先枚举出三角形内部的点D。
下面所说的旋转没有指明逆时针还是顺时针则是指逆时针旋转。
固定内部点的答案的获取
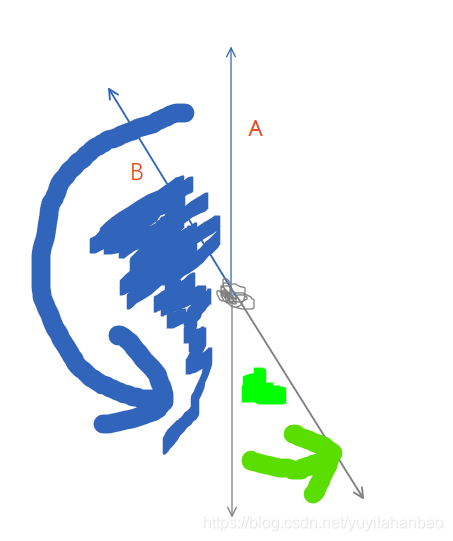
anti(A)anti(A)anti(A)或者说A‾\overline{A}A表示DA→\overrightarrow{DA}DA旋转180°之后的方向。
block(A,B)block(A,B)block(A,B)表示的是DA→\overrightarrow{DA}DA旋转到DB→\overrightarrow{DB}DB的扫过的几何区间。小括号表示不包含边界,中括号表示包含边界。
假设确定了A点,那么对于D,A的ans数是
∑B∈(A,A‾)∑C∈(A‾,B‾)1\sum\limits_{B \in (A,\overline{A})}\sum\limits_{C \in (\overline{A}, \overline{B})}1B∈(A,A)∑C∈(A,B)∑1.
以下是示意图。对于一个确定的A,B在蓝色区间范围内取一个点。
之后对于确定的B,C只需要且只能在绿色区间范围选一个。
如何确定几何区间里点的个数呢?
我们可以先求出一下信息保存在数组中。
- 各个点按逆时针方向编号
- 各个点的方向
dir数组 - 各个方向第一个点的编号和最后一个点的编号,即firstfirstfirst和lastlastlast.
infos数组 - 各个方向的反向方向的firstfirstfirst和lastlastlast.
antiinfos数组.
假设我们都已经求出来了。
∑B∈(A,A‾)∑C∈(A‾,B‾)1=∑B∈(A,A‾)antiinfos[dir[B]].first−antiinfos[dir[A]].last−1\sum\limits_{B \in (A,\overline{A})}\sum\limits_{C \in (\overline{A}, \overline{B})}1\\
=\sum\limits_{B \in (A,\overline{A})}antiinfos[dir[B]].first - antiinfos[dir[A]].last - 1B∈(A,A)∑C∈(A,B)∑1=B∈(A,A)∑antiinfos[dir[B]].first−antiinfos[dir[A]].last−1
而B∈(A,A‾)B \in (A,\overline{A})B∈(A,A)换成点的编号表示的话就是——
infos[dir[A]].last+1≤B<antiinfos[dir[A]].first  infos[dir[A]].last + 1 \leq B < antiinfos[dir[A]].first\;infos[dir[A]].last+1≤B<antiinfos[dir[A]].first
注意现在的求和式中对于一个固定的A来说,有关A的都是常量。所以这是一个只和变量B有关的式子。
所以可以看做对一个数组a[B]a[B]a[B]求区间和的式子。
即变成∑B=infos[dir[A]].last+1antiinfos[dir[A]].first−1a[B]\sum\limits_{B = infos[dir[A]].last + 1}^{antiinfos[dir[A]].first - 1} a[B]B=infos[dir[A]].last+1∑antiinfos[dir[A]].first−1a[B].
对于一个固定的A求出每一个a[B]只能对一个个B单独求.
但AAA换成下一个方向的A′A'A′时。B的上界和下界将会随之改变,但是新的上界和下界,很有可能会有一大段重复的。即假设旧的区间是[l,r],新的区间是[L,R]。对于这两个区间重叠的部分B∈[u,v]B \in [u,v]B∈[u,v].对于a[B]来讲,B没有变化,变化的只是A变成了A’。所以[u,v][u,v][u,v]区间里的a[B]a[B]a[B]只需要在集体区间减去一个与A,A′A,A'A,A′有关的变化量即可。而对于[L,R]区间中不重叠的部分,就只能一个一个B单独枚举计算了。由于A是从逆时针方向一个个往后枚举的,所以上下界[l,r]也是一直往后移动。因此,不重叠的需要单独计算的部分a[B]最多就是每个点计算一次。对于所有的A来说,单独计算修改次数是O(n)O(n)O(n)级别的。求区间和的次数也是O(n)O(n)O(n)级别的。
因此可以使用线段树解决。
注意
对于一朵Flower ABC-D,D是内部点,在这个方法下,会被计算三次。分别是A,B,C充当上面所说的A点。所以最后答案要除以3.
反向信息的求取
对于旋转180°之后的方向,即反方向。如果这个方向上有点,那么就取这个方向的firstfirstfirst和lastlastlast;如果这个方向上没有点,那么firstfirstfirst置为旋转度数超过180°的第一个方向的firstfirstfirst,而lastlastlast就是first−1first-1first−1。
对于单个方向DP→\overrightarrow{DP}DP的反方向的DP→‾\overline{\overrightarrow{DP}}DP显然可以通过DP→\overrightarrow{DP}DP的以下一个方向开始,一个个方向检查过去,找到恰好180°或者第一个大于180°的。因此复杂度是O(n)O(n)O(n)
对于P所有方向的反方向是O(n2)O(n^2)O(n2)???
由于我们一个点P的方向实际上是DP→\overrightarrow{DP}DP的方向,所以外面还有一层枚举D的O(n)O(n)O(n).那样子O(n3)O(n^3)O(n3)就Tle了。
但是,注意到DP→\overrightarrow{DP}DP的下一个方向DQ→\overrightarrow{DQ}DQ的反向DQ→‾\overline{\overrightarrow{DQ}}DQ,肯定不会早于DP→‾\overline{\overrightarrow{DP}}DP出现。所以可以整体O(n)O(n)O(n)。求出所有方向的反向。
最后总的复杂度是
O(n^2lnn).
其中排序、线段树的区间查询、修改都达到了O(n^2lnn)。
### 源程序
代码中的区间l,r,L,R是左闭右开的。first和last则都是包含的。
#include <bits/stdc++.h>
using namespace std;
typedef long long ll;
//#define debugmode
const int kMaxPointCount = 1024;
const int kMaxPointCount2 = kMaxPointCount*2;
struct nd{
int l,r;
ll all_add, sum;
};
nd nds[kMaxPointCount2<<2];
inline int lchild(int x) { return (x << 1) | 1;}
void build(int l,int r,int root = 0) { // 针对本题特殊定制的build
nds[root].l = l; nds[root].r = r;
nds[root].all_add = 0; nds[root].sum = 0;
if (l + 1 == r) return;
int m = l + (r - l) / 2;
int lch = lchild(root);
build(l, m, lch);
build(m, r, lch+1);
}
void add(int l, int r, ll val, int root = 0) {
if (l == nds[root].l && r == nds[root].r) {
nds[root].all_add += val;
// sum是不考虑自己的以及祖先的all_add的flag情况下的sum
// 所以这个节点区间集体加的时候不update sum
return;
}
int m = (nds[root].l + nds[root].r)/2;
int lch = lchild(root);
if (r <= m) { // only left part
add(l, r, val, lch);
} else if (l >= m) { // only right part
add(l, r, val, lch+1);
} else {
add(l, m, val, lch);
add(m, r, val, lch+1);
}
// merge_flags
// sum是不考虑自己的以及祖先的all_add的flag情况下的sum
nds[root].sum += val * (r-l);
}
ll get_sum(int l, int r, int root = 0) {
ll base = nds[root].all_add*(r-l); // 求和函数需要把all_add标记考虑到(修正)
if (l == nds[root].l && r == nds[root].r) {
return nds[root].sum + base;
}
int m = (nds[root].l + nds[root].r)/2;
int lch = lchild(root);
if (r <= m) { // only left part
return get_sum(l, r, lch) + base;
} else if (l >= m) { // only right part
return get_sum(l, r, lch+1) + base;
} else {
return get_sum(l, m, lch) + get_sum(m, r, lch+1) + base;
}
}
struct point_with_angle;
struct point{
ll x, y;
point(){}
point(ll x, ll y):x(x),y(y) {}
void set(const point_with_angle& a);
ll operator *(const point&b) const {return x*(ll)b.x+y*b.y;} // 向量积,点积
ll operator %(const point&b) const {return x*(ll)b.y-y*b.x;} // 叉乘
point operator -(const point &b) const {return point(x - b.x, y-b.y);}
point operator +(const point &b) const {return point(x + b.x, y+b.y);}
bool operator ==(const point&b) const {return x == b.x && y == b.y;}
};
inline int sign(ll a) {return a ? (a > 0 ? 1 : -1) : 0;}
struct point_with_angle {
ll x, y;
int type;
double k;
void set(const point& a) {
x = a.x; y = a.y;
if (y < 0) type = 0;
else if (y > 0) type = 2;
else if (x > 0) type = 1;
else type = 3;
if (type & 1) k = x;
else k = x/(double)y;
}
bool operator<(point_with_angle& b) const {
if (type != b.type)
return type < b.type;
else
return k > b.k;
}
};
void point::set(const point_with_angle& a) {x = a.x; y = a.y;}
struct info{
int first,last,cnt;
info(){}
void set(int f, int l) {first = f; last = l; cnt = l-f+1;}
};
point inp[kMaxPointCount];
typedef point vec;
point_with_angle sort_p[kMaxPointCount];
vec vecs[kMaxPointCount2];
int vec_to_dir[kMaxPointCount2];
// infos of dir and infos of anti dir
info infos[kMaxPointCount2],antiinfos[kMaxPointCount2];
int pn, vecn, dirn;
void get_vecs(int d) {
vecn = 0;
for (int i = 0; i < pn; ++i)
if (inp[i] == inp[d]) continue;
else sort_p[vecn++].set(inp[i]-inp[d]);
sort(sort_p, sort_p+vecn);
for (int i = 0; i < vecn; ++i)
vecs[i].set(sort_p[i]);
for (int i = 0, j = vecn; i < vecn; ++i, ++j)
vecs[j] = vecs[i];
}
// a,b都是非零向量
bool is_same_dir(const vec&a, const vec&b) { return a%b == 0 && a*b > 0; }
void get_dir() {
// 如果和前面的方向相同,那么就应该用前面的dir
// 否则,应该使用新dir
dirn = 0;
for (int i = 0; i < vecn; ++i) {
if (i && is_same_dir(vecs[i],vecs[i-1])) {
vec_to_dir[i] = dirn - 1;
} else {
++dirn;
vec_to_dir[i] = dirn - 1;
}
}
for (int i = 0, j = vecn; i < vecn; ++i, ++j)
vec_to_dir[j] = vec_to_dir[i] + dirn;
}
void get_infos() {
for (int i = 0, d = -1; i < vecn; ++i) {
if (vec_to_dir[i] != d) {
if (d >= 0) infos[d].last = i-1;
d = vec_to_dir[i];
infos[d].first = i;
}
}
if (dirn) infos[dirn -1].last = vecn - 1;
for (int i = 0; i < dirn; ++i)
infos[i].cnt = infos[i].last - infos[i].first + 1;
for (int i = 0, j = dirn; i < dirn; ++i, ++j)
infos[j].set(infos[i].first + vecn, infos[i].last + vecn);
}
void get_antiinfos() {
// j应该在anti(i)的位置停下,如果有的话。如果没有的话,
// 那么它停在的是逆时针旋转超过180°的第一个存在的vec
// j的探查范围开始是i后一个方向 止于i旋转一圈的方向i+dirn(不含)
// 因为判断逆时针旋转度数只是单纯的使用叉乘
// 叉乘为0视作旋转180°,<0旋转小于180°,>0旋转大于180°
// 如果不对j做限定,将会同一个方向视作旋转180°
int i,j;
int res;
for (i = 0, j = 0; i < dirn; ++i) {
for (j = max(j, i+1); j < i + dirn; ++j) {
res = sign(vecs[infos[i].first]%vecs[infos[j].first]);
if (res == 0) { // = 180°
antiinfos[i].set(infos[j].first, infos[j].last);
break;
} else if (res < 0) { // > 180°
antiinfos[i].set(infos[j].first, infos[j].first -1);
break;
}
}
if (j >= i + dirn) {
antiinfos[i].set(infos[j].first, infos[j].first -1); // 360°
}
}
for (int i = 0, j = dirn; i < dirn; ++i, ++j)
antiinfos[j].set(antiinfos[i].first + vecn, antiinfos[i].last + vecn);
}
ll solve() {
ll ans = 0;
int dA, dB;
int B;
int l = 0, r = 0, L, R;
bool need_work;
ll tmp_val;
build(0, 2 * vecn);
for (dA = 0; dA < dirn; ++dA) {
L = infos[dA].last + 1;
R = antiinfos[dA].first;
need_work = L < R;
if (need_work && L < r) {
// 区间集体减
tmp_val = antiinfos[dA].last - antiinfos[dA-1].last;
add(L, r, -tmp_val);
}
for (B = max(L, r); B < R; B = infos[dB].last + 1) {
dB = vec_to_dir[B];
add(B, infos[dB].last + 1,
antiinfos[dB].first - antiinfos[dA].last - 1);
}
if (need_work) {
tmp_val = get_sum(L, R);
ans += infos[dA].cnt * tmp_val;
}
l = L; r = R;
}
return ans;
}
int main() {
cin>>pn;
for (int i = 0; i < pn; ++i)
scanf("%lld%lld",&inp[i].x, &inp[i].y);
ll ans = 0;
for (int d = 0; d < pn; ++d) {
get_vecs(d);
get_dir();
get_infos();
if (dirn < 3) continue;
get_antiinfos();
ans += solve();
}
cout<<ans/3<<endl;
return 0;
}
弱鸡的我的吐槽模块
由于一开始按照逆时针编号的排序是使用atan2获取极角,然后一直卡在90.48%。各个地方都改过,还是一直过不去。写了两天了,这个程序还是推倒然后重新写的一个。
debug到怀疑人生。最后发现牛客网提交的程序里面可以有assert语句,然后,assert不成立还会re并提示是哪一行assert语句出错了。
于是疯狂assert。
通过疯狂assert最后诡异的发现更后面的anti的last居然比前面的last还要小,导致区间集体要减去的数算出来是个负数。
然后疯狂读自己的程序,妄图找出bug,分析了好久好久,分析到最后已经相当于从数学上确定,没有逻辑错误,就是正确的。
想过爆long long。但是想来想去不可能,许久之后怀疑是排序之后并不是逆时针排列的,最后把atan2换掉了之后,突然就ac了。
atan2让我浪费了一天半的时间。
珍爱生命,慎用atan2.
感觉最近队内输出基本都是靠lsq输出,疯狂白嫖队友的感觉。
羞愧.jpeg
2019牛客多校第八场 F题 Flowers 计算几何+线段树的更多相关文章
- 2020牛客多校第八场K题
__int128(例题:2020牛客多校第八场K题) 题意: 有n道菜,第i道菜的利润为\(a_i\),且有\(b_i\)盘.你要按照下列要求给顾客上菜. 1.每位顾客至少有一道菜 2.给顾客上菜时, ...
- 2019牛客多校第四场 I题 后缀自动机_后缀数组_求两个串de公共子串的种类数
目录 求若干个串的公共子串个数相关变形题 对一个串建后缀自动机,另一个串在上面跑同时计数 广义后缀自动机 后缀数组 其他:POJ 3415 求两个串长度至少为k的公共子串数量 @(牛客多校第四场 I题 ...
- 牛客多校第十场 A Rikka with Lowbit 线段树
链接:https://www.nowcoder.com/acm/contest/148/A来源:牛客网 题目描述 Today, Rikka is going to learn how to use B ...
- Distance(2019年牛客多校第八场D题+CDQ+树状数组)
题目链接 传送门 思路 这个题在\(BZOJ\)上有个二维平面的版本(\(BZOJ2716\)天使玩偶),不过是权限题因此就不附带链接了,我也只是在算法进阶指南上看到过,那个题的写法是\(CDQ\), ...
- Explorer(2019年牛客多校第八场E题+线段树+可撤销并查集)
题目链接 传送门 题意 给你一张无向图,每条边\(u_i,v_i\)的权值范围为\([L_i,R_i]\),要经过这条边的条件是你的容量要在\([L_i,R_i]\),现在问你你有多少种容量使得你可以 ...
- 2019牛客多校第八场A All-one Matrices 悬线法,单调栈待补
All-one Matrices 题意 对于一个n,m的01矩阵,问有多少个极大矩阵. 分析 对于悬线法来说,其过程就是枚举极大矩阵的过程,那如何计数呢?对于一个点来说,若其左右边界包含了上一个点的悬 ...
- 2019年牛客多校第三场 F题Planting Trees(单调队列)
题目链接 传送门 题意 给你一个\(n\times n\)的矩形,要你求出一个面积最大的矩形使得这个矩形内的最大值减最小值小于等于\(M\). 思路 单调队列滚动窗口. 比赛的时候我的想法是先枚举长度 ...
- 2019牛客多校第三场 F.Planting Trees
题目链接 题目链接 题解 题面上面很明显的提示了需要严格\(O(n^3)\)的算法. 先考虑一个过不了的做法,枚举右下角的\((x,y)\),然后二分矩形面积,枚举其中一边,则复杂度是\(O(n^3 ...
- 2019牛客多校赛第一场 补题 I题
I题 Points Division 题意: 给你n个点,每个点有坐标(xi,yi)和属性(ai,bi),将点集划分为两个集合, 任意 A 集合的点 i 和 B 集合点 j, 不允许 xi > ...
随机推荐
- hdu 1159求最长公共子序列
题目描述:给出两个字符串,求两个字符串的公共子序列(不是公共子串,不要求连续,但要符合在原字符串中的顺序) in: abcfbc abfcab programming contest abcd mnp ...
- 《Python学习手册 第五版》 -第5章 数值类型
本章是承接第四章整体说明之后,将对”数值类型“展开详细的说明 数值类型这一章主要通过一下几个内容来讲解: 1.数值类型有哪些? 2.表达式运算符:有哪些?有什么规范? 3.数值的显示格式 接下来,从第 ...
- How to make as map two or more device located in the same media pool by using ddboost + nw
How to make as map two or more device located in the same media pool by using ddboost + nw ? That is ...
- 动手学习Pytorch(7)--LeNet
Convolutional Neural Networks 使用全连接层的局限性: 图像在同一列邻近的像素在这个向量中可能相距较远.它们构成的模式可能难以被模型识别. 对于大尺寸的输入图像,使用全连接 ...
- Bound Method and Unbound Method - 绑定方法 与 非绑定方法
Bound Method and Unbound Method 通常有两种方法对类的方法(instance.method)/属性(class.attribute)进行引用, 一种称做 Bound Me ...
- 二叉树的非递归遍历C++实现
#include<iostream> #include<stdlib.h> #define maxsize 100 using namespace std; typedef s ...
- vue 过渡 & 动画
过渡 & 动画 过渡动画 用css先定义好动画效果 .a-enter-active, .a-leave-active { transition: all 1.5s; } .a-enter, . ...
- 见异思迁:K8s 部署 Nginx Ingress Controller 之 kubernetes/ingress-nginx
前天才发现,区区一个 nginx ingress controller 竟然2个不同的实现.一个叫 kubernetes/ingress-nginx ,是由 kubernetes 社区维护的,对应的容 ...
- IntelliJ IDEA与eclipse生成JavaDoc的方法
JavaDoc是一种将注释生成HTML文档的技术. 1.使用javadoc命令生成文档 首先了解一下javadoc指令的用法 用法: javadoc [options] [packagenames] ...
- NCE L5
课文内容 重点单词解析 重点课文解析