论文阅读笔记(十九)【ITIP2017】:Super-Resolution Person Re-Identification With Semi-Coupled Low-Rank Discriminant Dictionary Learning
Introduction
(1)问题描述:
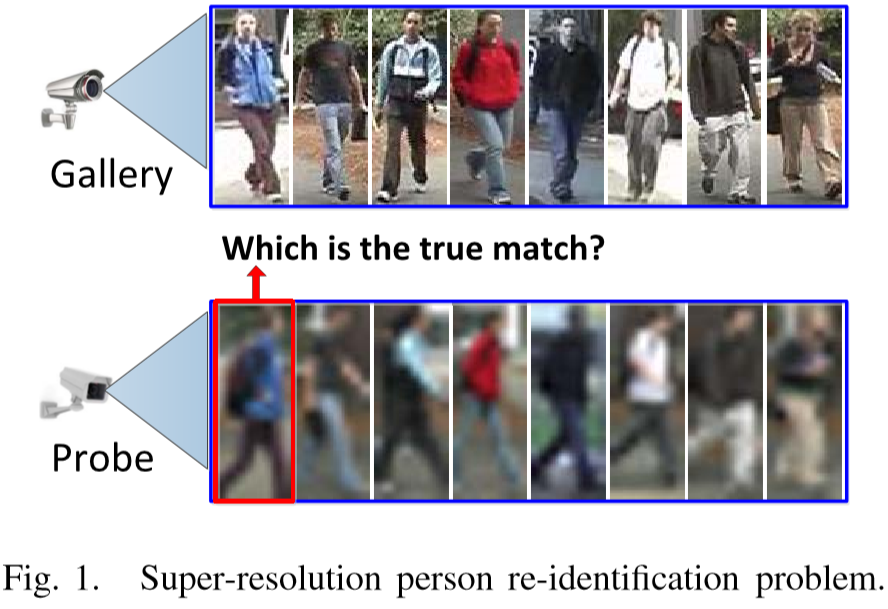
super resolution(SP)问题:Gallery是 high resolution(HR),Probe是 low resolution(LR)。
(2)当前存在的问题:
① 当前的半耦合(semi-coupled)矩阵学习是解决SR复原,而不是直接进行行人重识别;
② 行人图片存在噪声,直接使用半耦合矩阵学习无法很好的刻画特征空间。
(3)Contribution:
① 提出一个新的半耦合低秩判别矩阵学习方法(semi-coupled low-rank discriminant dictionary learning approach,SLD2L),该方法从图像特征中学习得到高低分辨率字典对,将低分辨率特征映射到高分辨率特征;
② 提出一个多视角 SLD2L 方法,对不同类别的特征学习出不同的特征对。
Brief Review
(1)SR问题中的耦合字典训练:
目标函数:

其中 xi 和 yi 为HR和LR的一对,且 ,γ 是平衡因子,Dx 和 Dy 为耦合字典,K 为原子数量,N 为训练样本数量,a 为编码系数。
,γ 是平衡因子,Dx 和 Dy 为耦合字典,K 为原子数量,N 为训练样本数量,a 为编码系数。
(2)行人重识别问题中的半监督耦合字典学习(SSCDL):
假定 x = {x1, x2, ..., xn}, y = {y1, y2, ..., ym},目标函数:
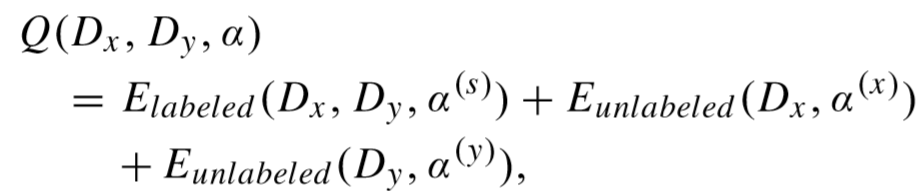
其中 α(x),α(y) 为无标签样本的系数矩阵,α(s) 为带标签样本的共享系数矩阵。
(3)半耦合矩阵学习(SCDL):
目标函数:
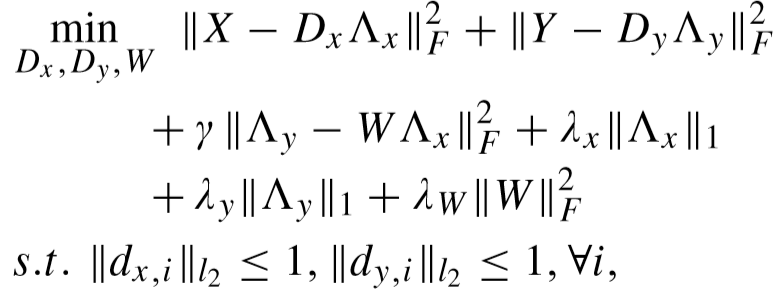
其中 γ、λx、λy、λW 为平衡因子,dx,i,dy,i 为字典矩阵的原子,Λx、Λy 为编码系数矩阵,W 为映射矩阵。
Semi-coupled low-rank discriminant dictionary learning(SLD2L)
(1)问题定义:
CA 表示相机A拍摄的HR行人图像,CB 表示相机B拍摄的LR行人图像,并生成相机A的LR图像 CA',即和 CB 含有相同的分辨率。
在实际中,低分辨率在不同区域的影响是不一样的,如在单一色调的区域影响较小,在复杂纹理的区域影响较大,因此可以考虑将图像划分为若干patch,并对patch进行聚类,对每个聚类学习一个子字典(sub-dictionary)和映射函数。文章对 CA' 和 CB 进行划分patch,并使用K-means聚类,在依据 CA' 的聚类结果,将 CA 划分的patch聚入其中。
定义第 i 个聚类的HR、LR的字典为 DHi、DLi, 第 i 个聚类的映射矩阵为 Vi,获得字典集合有:DH = [DH1, DH2, ..., DHc],DL = [DL1, DL2, ..., DLc],映射矩阵集合有 V = {V1, V2, ..., Vc},c 为聚类数量.
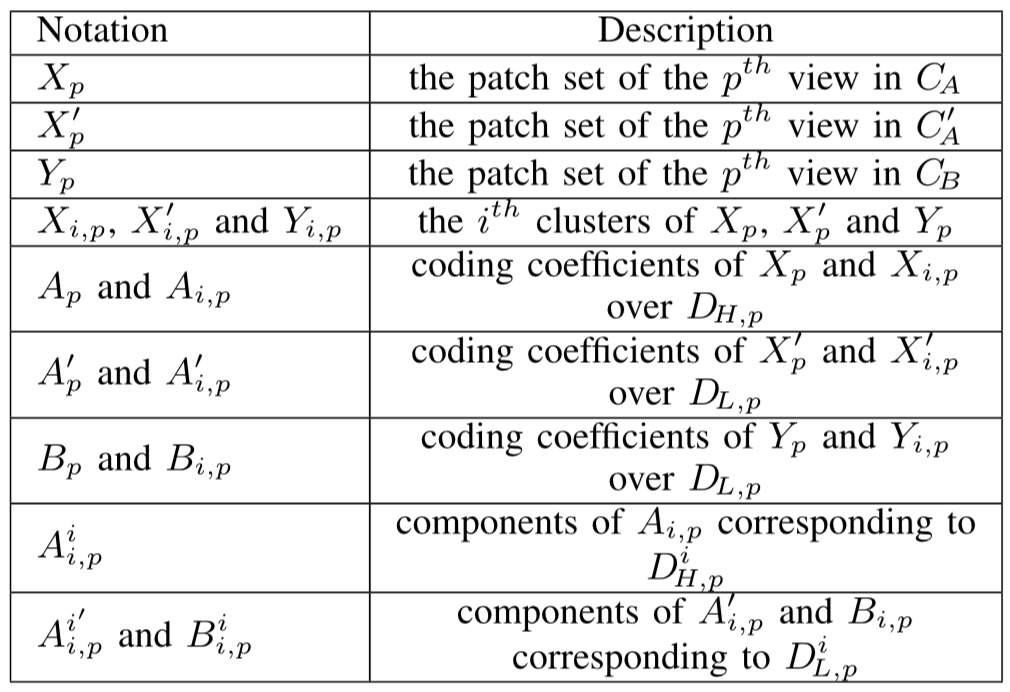
其它参数定义:

(2)方法概述:

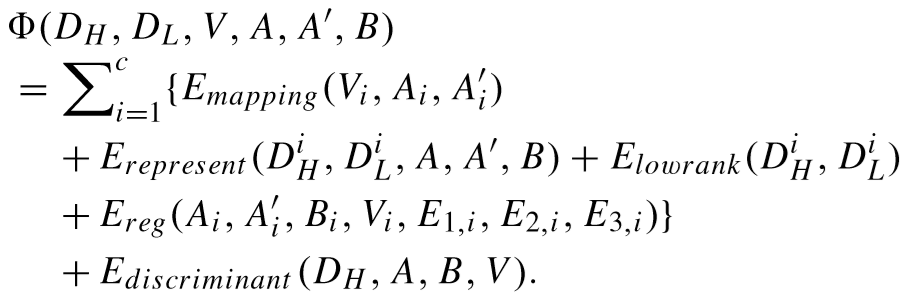
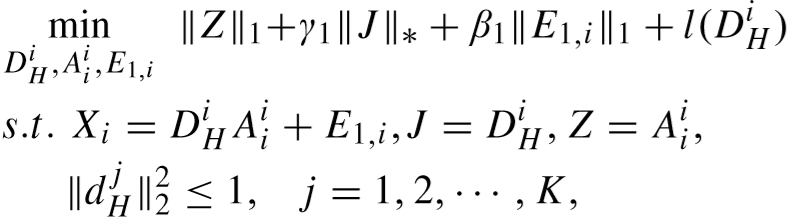
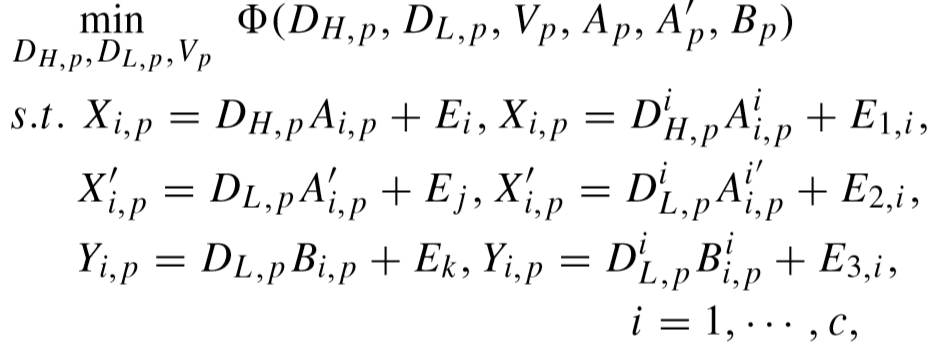
目标函数:
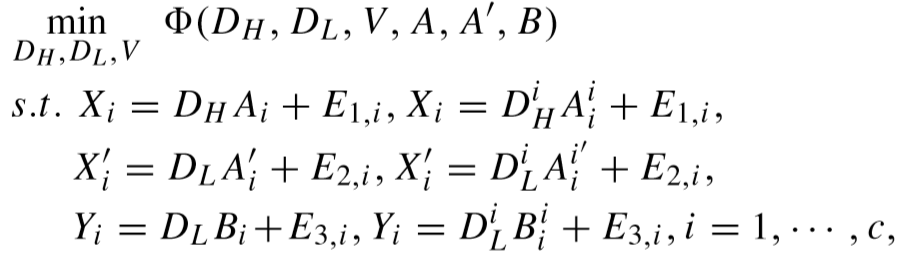
其中的约束条件为:学习的字典能够非常好的表示训练样本的内在特征,E1,i,E2,i,E3,i 表示噪声。
其中:
映射项:
子字典表征能力项:
(为了让第 i 个子字典对除了第 i 个聚类外的特征,具有较差的表征能力)
低秩正则化项:
正则化项:
区分度项:
(其中 S 和 D 表示正样本对和负样本对, 表示 CA 第 p 个图片的重构特征,
表示 CA 第 p 个图片的重构特征, 表示 CB 第q 个图片的重构特征,n 为每张图片的patch数)
表示 CB 第q 个图片的重构特征,n 为每张图片的patch数)
(3)优化算法:
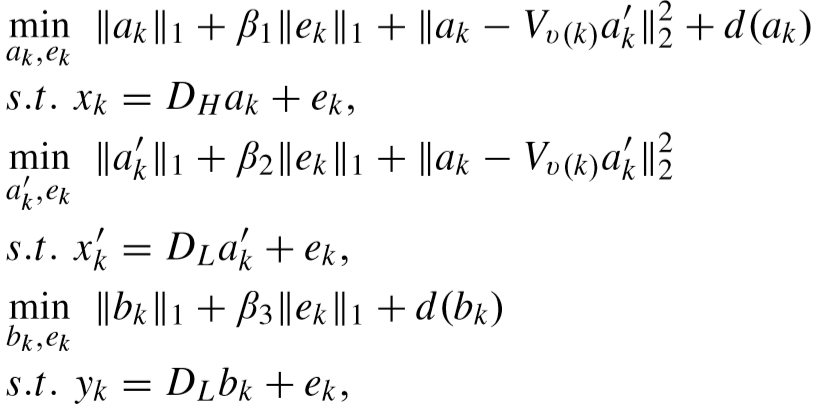
① 固定 DH、DL、V,更新 A、A'、B:
初始化字典和映射矩阵:字典采用PCA偏差进行初始化,映射矩阵采用单位矩阵初始化;
编码系数计算如下,其中d()表示为区分度项的计算函数:
解法:
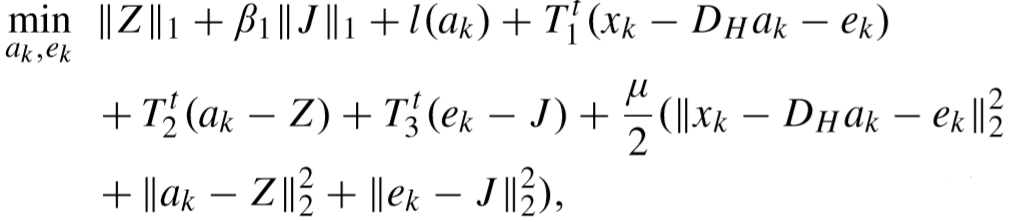
对于第一个优化目标,转化为如下问题:

其中
可以转为增广拉格朗日乘子问题(Augmented Lagrange Multiplier problem)【传送门】,即:
【具体解法在该论文的引用[47][50]中介绍,尚未阅读】
第二第三个优化目标同理。
② 固定 DHj、DLj、A、A’、B、V(其中 j ≠ i),更新 DHi 和 DLi:
由于受到约束条件 、
、 、
、 等影响,
等影响, 、
、 、
、 也要进行更新。定义:
也要进行更新。定义:
 ,DHi 和 DLi 的更新过程如下:
,DHi 和 DLi 的更新过程如下:

其中:

且:
解法:
将 DHi 的目标函数更新为:
其中:
转化为拉格朗日乘子问题:

DLi 的解法同理。
③ 固定 DHi、DLi、A、A'、B、Vj(j ≠ i),更新 Vi:

其中 

令: ,则目标函数转化为:
,则目标函数转化为:

迭代更新如下:

上式是一个岭回归问题,求解为:

下式求解为:

(4)算法总结:

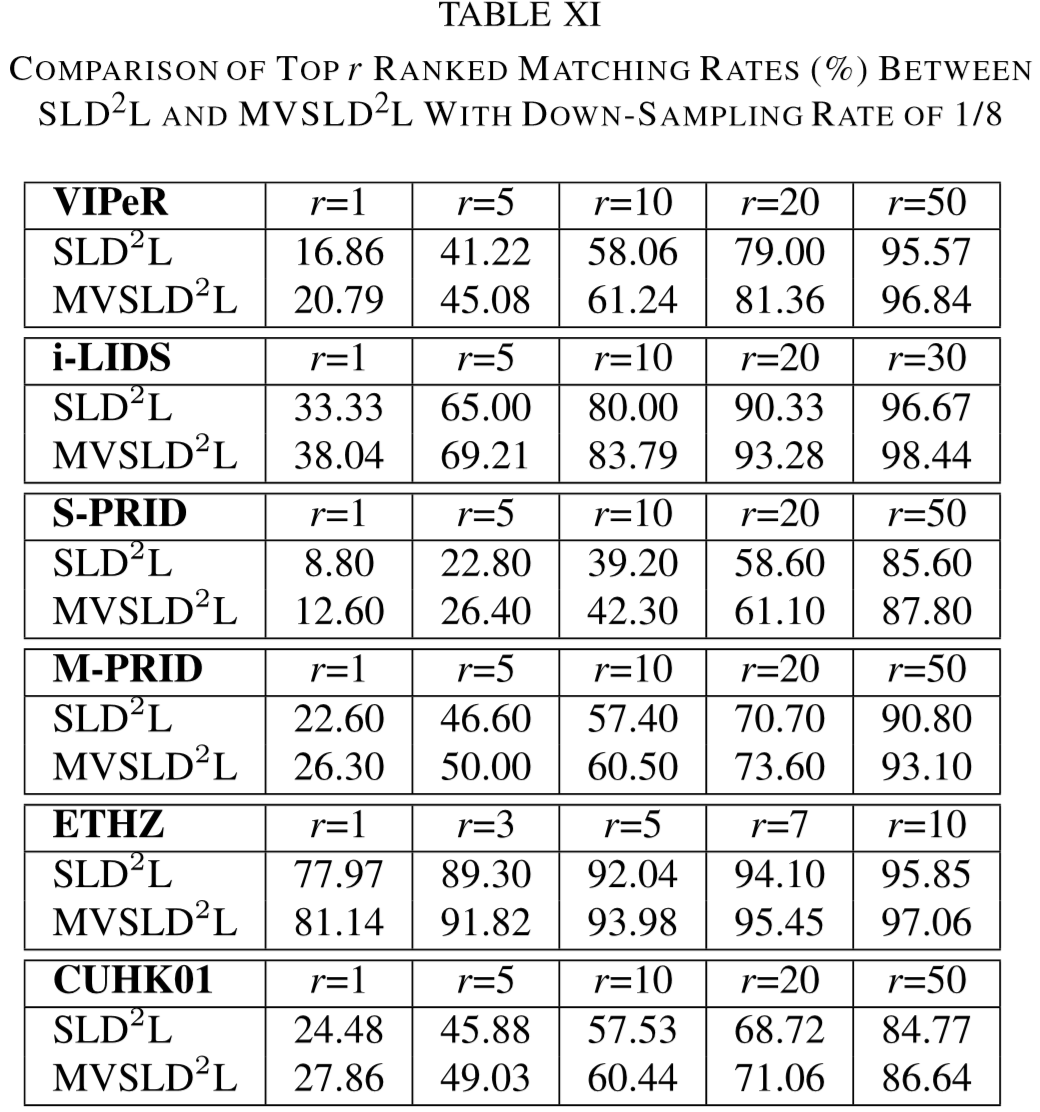
Multi-view SLD2L(MVSLD2L)
通过实验发现,不同的特征提取对于高低分辨率的映射效果是不同的。
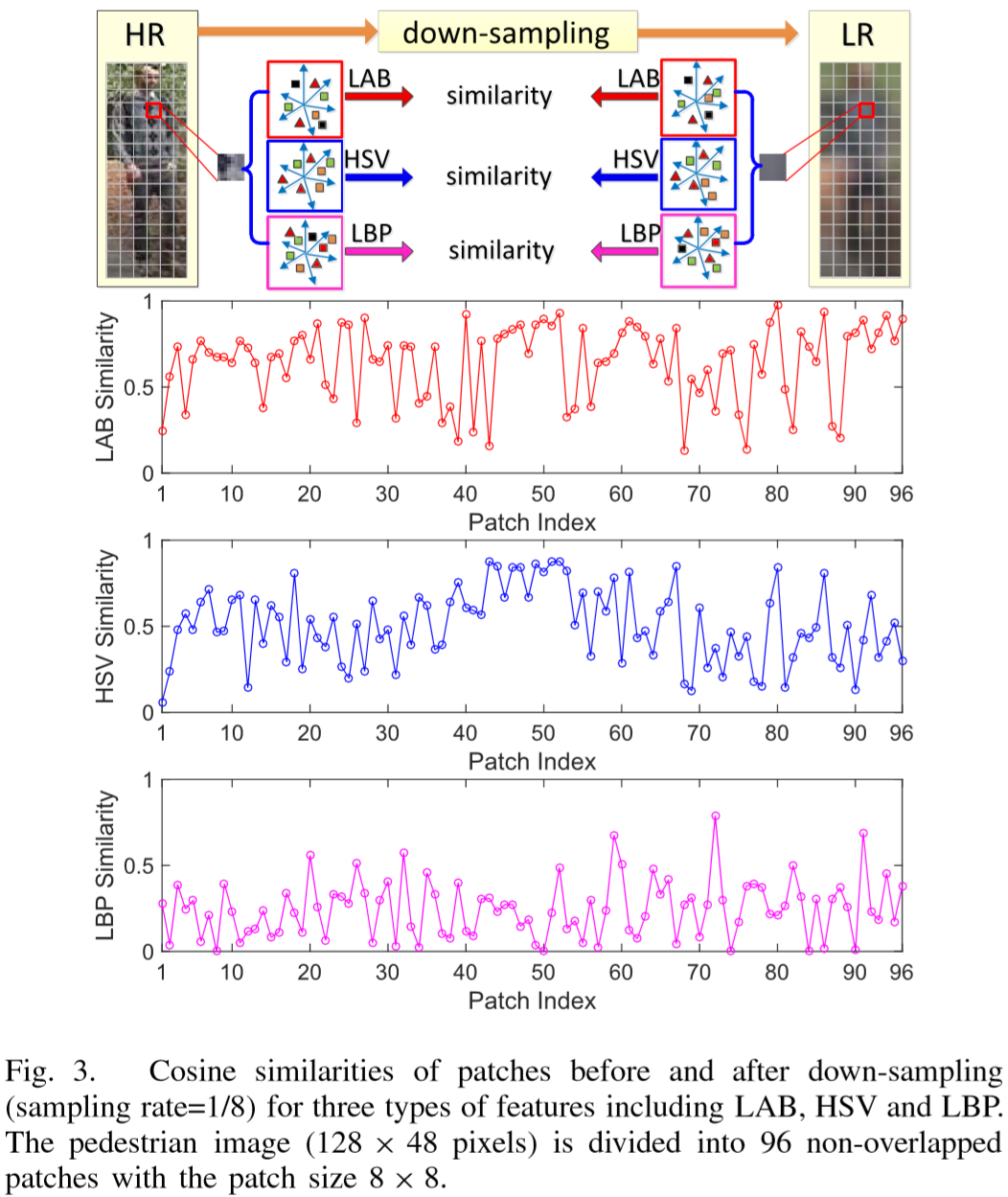
MVSLD2L 针对不同类型的特征学习不同的映射矩阵,即:对于每个patch,都提取 HSV、LAB、LBP特征,并学习对应的映射矩阵。
变量定义更新:
目标函数更新:
采用上述方法解出每种特征的字典和映射矩阵。
Super-resolution person re-identification with learning dictionaries and mappings
(1)采用SLD2L的行人重识别:
① 将Probe中LR图像映射到HR特征中:
定义 yi 为第 i 个patch的特征:

聚类索引 j 通过以下函数计算:

将特征 yi 映射到HR特征中:
② 重构Gallery中的图像的特征:

③ 采用欧氏距离计算,对Probe图像与Grallery图像进行匹配。
(2)采用 MVSLD2L 进行行人重识别:(主要流程同上,在重构特征部分改进如下)

Experimental results
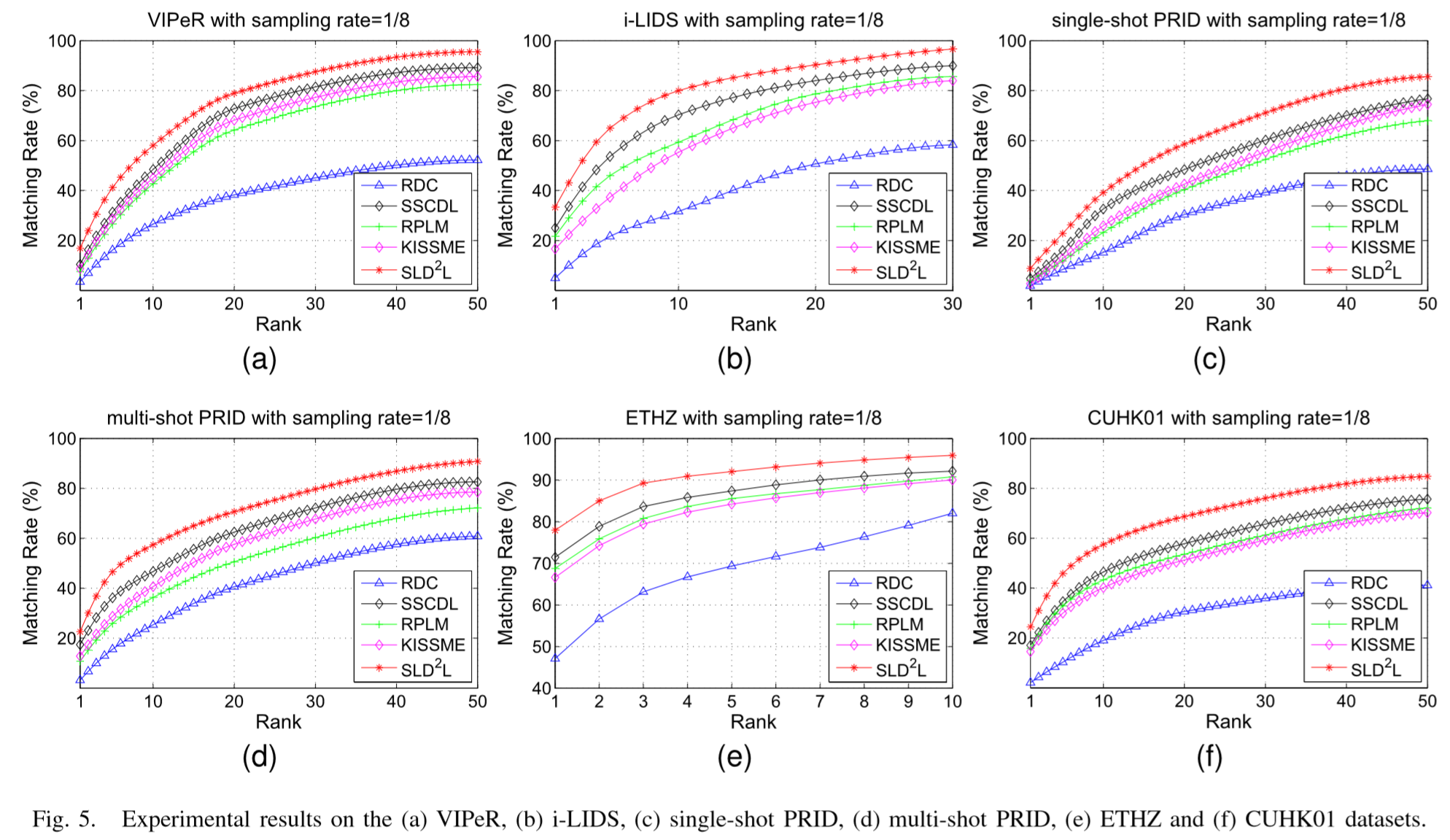
(1)实验设置:
① 数据集:VIPeR、PRID、CUHK01、i-LIDS、ETHZ;
② 特征提取:HSV、LAB、LBP;
③ 参数设置:λ1 = 1,λ2 = 1,λ3 = 1,λ4 = 1,
对于 VIPeR,
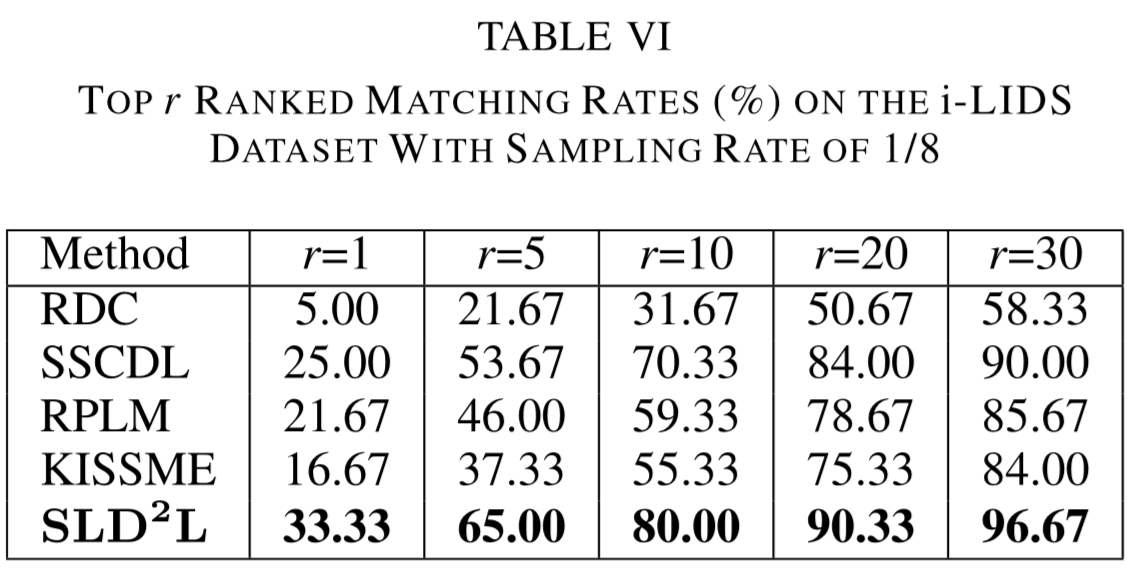
对于 i-LIDS,
对于 PRID,
对于 ETHZ,
对于 CUHK01,


设置聚类的数量为64,图片的patch分割为 8*8,每个子字典的原子数量为 48.
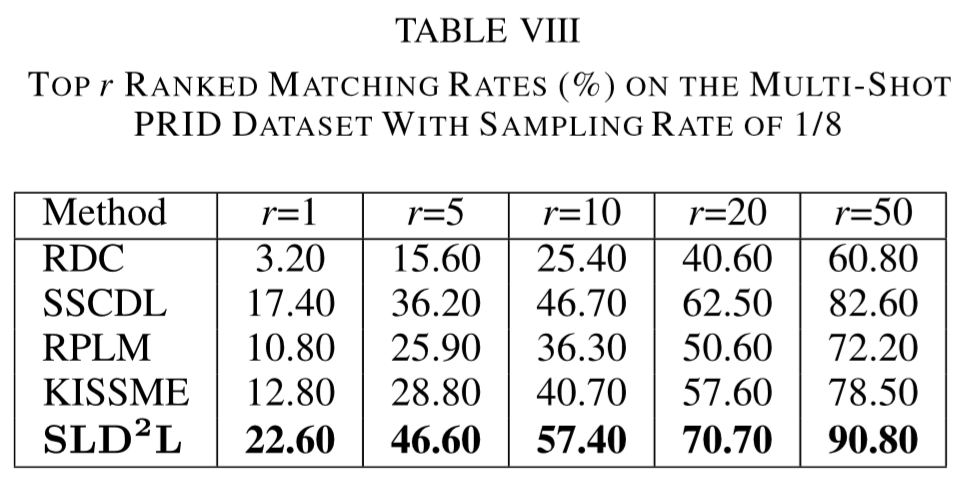
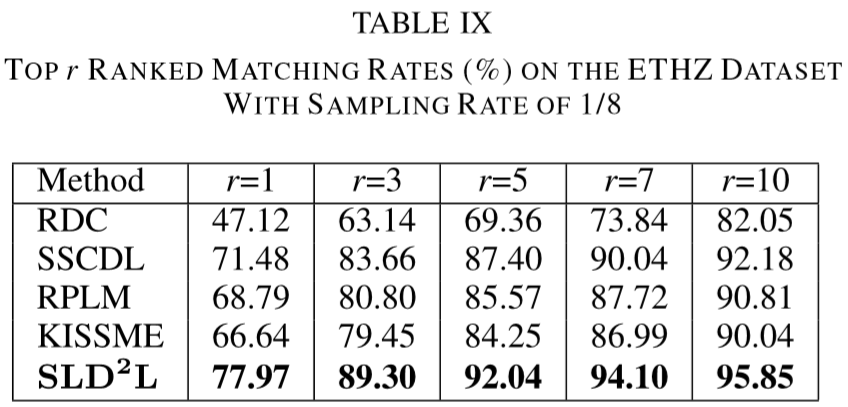
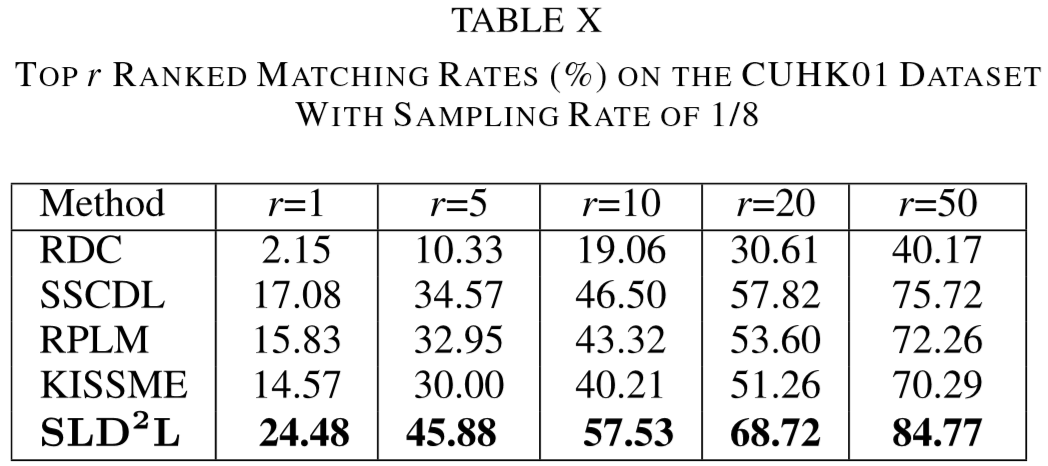
(2)实验结果:

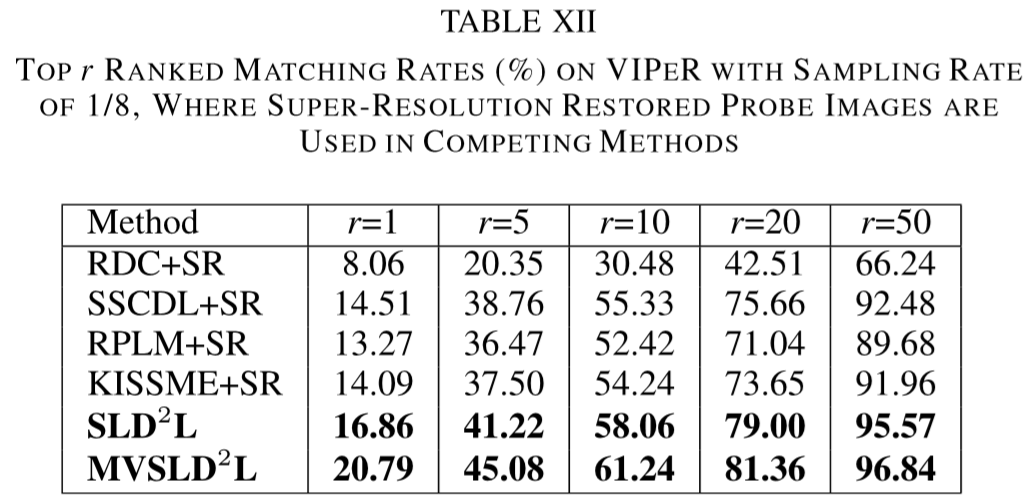
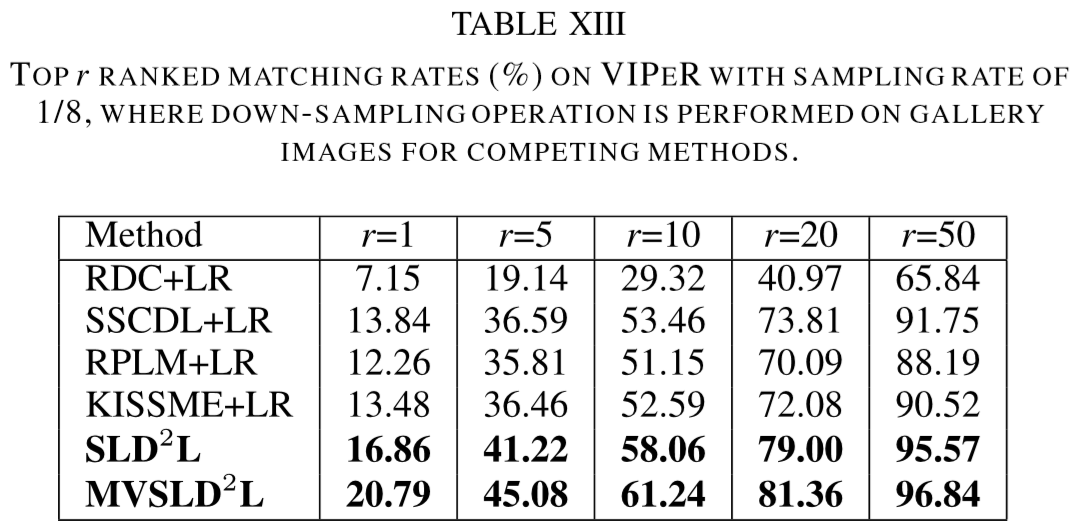
论文阅读笔记(十九)【ITIP2017】:Super-Resolution Person Re-Identification With Semi-Coupled Low-Rank Discriminant Dictionary Learning的更多相关文章
- 论文阅读笔记十九:PIXEL DECONVOLUTIONAL NETWORKS(CVPR2017)
论文源址:https://arxiv.org/abs/1705.06820 tensorflow(github): https://github.com/HongyangGao/PixelDCN 基于 ...
- 论文阅读笔记(九)【TIFS2020】:True-Color and Grayscale Video Person Re-Identification
Introduction (1)Motivation:在现实场景中,摄像头会因为故障呈现灰白色,或者为了节省视频的存储空间而人工设置为灰白色.灰度图像(grayscale images)由8位存储,而 ...
- 论文阅读笔记十八:ENet: A Deep Neural Network Architecture for Real-Time Semantic Segmentation(CVPR2016)
论文源址:https://arxiv.org/abs/1606.02147 tensorflow github: https://github.com/kwotsin/TensorFlow-ENet ...
- 论文阅读笔记十六:DeconvNet:Learning Deconvolution Network for Semantic Segmentation(ICCV2015)
论文源址:https://arxiv.org/abs/1505.04366 tensorflow代码:https://github.com/fabianbormann/Tensorflow-Decon ...
- 论文阅读笔记十五:Pyramid Scene Parsing Network(CVPR2016)
论文源址:https://arxiv.org/pdf/1612.01105.pdf tensorflow代码:https://github.com/hellochick/PSPNet-tensorfl ...
- 论文阅读笔记十四:Decoupled Deep Neural Network for Semi-supervised Semantic Segmentation(CVPR2015)
论文链接:https://arxiv.org/abs/1506.04924 摘要 该文提出了基于混合标签的半监督分割网络.与当前基于区域分类的单任务的分割方法不同,Decoupled 网络将分割与分类 ...
- 论文阅读笔记十二:Encoder-Decoder with Atrous Separable Convolution for Semantic Image Segmentation(DeepLabv3+)(CVPR2018)
论文链接:https://arxiv.org/abs/1802.02611 tensorflow 官方实现: https: //github.com/tensorflow/models/tree/ma ...
- 论文阅读笔记十:DeepLab: Semantic Image Segmentation with Deep Convolutional Nets, Atrous Convolution, and Fully Connected CRFs (DeepLabv2)(CVPR2016)
论文链接:https://arxiv.org/pdf/1606.00915.pdf 摘要 该文主要对基于深度学习的分割任务做了三个贡献,(1)使用空洞卷积来进行上采样来进行密集的预测任务.空洞卷积可以 ...
- 论文阅读笔记(十八)【ITIP2019】:Dynamic Graph Co-Matching for Unsupervised Video-Based Person Re-Identification
论文阅读笔记(十七)ICCV2017的扩刊(会议论文[传送门]) 改进部分: (1)惩罚函数:原本由两部分组成的惩罚函数,改为只包含 Sequence Cost 函数: (2)对重新权重改进: ① P ...
随机推荐
- qt QTreeWidget使用
itemwidget.h #ifndef ITEMWIDGET_H #define ITEMWIDGET_H #include <QtWidgets/QWidget> #include & ...
- 牛客练习赛39 B 选点(dfs序+LIS)
题意: 有一棵n个节点的二叉树,1为根节点,每个节点有一个值wi.现在要选出尽量多的点. 对于任意一棵子树,都要满足: 如果选了根节点的话,在这棵子树内选的其他的点都要比根节点的值大: 如果在左子树选 ...
- Go语言实现:【剑指offer】正则表达式匹配
该题目来源于牛客网<剑指offer>专题. 请实现一个函数用来匹配包括 . 和 * 的正则表达式.模式中的字符.表示任意一个字符,而 * 表示它前面的字符可以出现任意次(包含0次). 在本 ...
- Hanoi塔问题——递归
/////////////Hanoi塔问题///////#include<iostream>using namespace std;void hanoi(int i,char A,char ...
- C++ 基础--虚构函数
virtual 函数 示例代码如下: #include <stdio.h> class base { public: virtual void name(){printf("ba ...
- mysql 8.0.12版本 忘记密码
1.mysqld --console --skip-grant-tables --shared-memory 2.另一个控制台 mysq 3.use mysql; 4.select user,host ...
- lwip的netif状态管理
netif的状态变化可以设置回调函数, 主要有三项变化, 1 netif up or down,address change,address state change(IPv6) 2 link up ...
- MongoDB oplog 详解
oplog 简介 oplog 是local库下的一个固定集合,Secondary就是通过查看Primary的oplog这个集合来进行复制的.每个节点都有oplog,记录从主节点复制过来的信息,这样每个 ...
- Day3前端学习之路——CSS基本知识
课程目标 初步了解什么是CSS,掌握基本的CSS概念,语法,针对选择器特殊性的计算处理,以及学习如何设置一些简单的样式 任务一:回答问题 1.什么是CSS,CSS是如何工作的? CSS 指层叠样式表 ...
- Pch文件预编译
因为项目用到Pch文件链接宏变量,因而稍作研究怎样使用,define宏变量其实并不合适 ,static const才最适合 Pch文件听说是上古世纪存在的文件,主要是用来全局预编译文件统一在一个出口, ...