PID control
|—平滑化算法
|—PID控制—|—P控制器编程
|—PD控制编程
|—PID控制编程
|—参数优化
|—实验P、PD、PID对减小系统误差的作用
这里讨论怎么将路径转变成行动指令(生成平滑的路径),用到PID去控制。
从出发点到目的地,实际的路径不能像之前的path plan(蓝色),没有car能立转90度,也不能像绿色斜转45度,红色路径最好温和地移动。
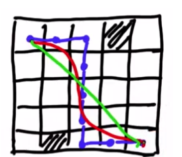
平滑化算法
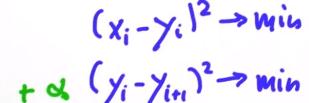
将路径规划找出来的每个小格点设为x0~xi~ xn-1(未平滑化),并设置值与xi相等的变量yi,然后做两项优化使每项平方差最小

if只做第一项优化,结果仍会是原始路径因为步骤1已经设置的是两变量相减为0,而if只做第二项优化会使得相邻平滑点越来越近,最后除了一个原始点get nothing。
可以看出这两项式子是互相斗争的,使y i更接近xi点意味着路径趋向于块状而不光滑(如上面的蓝色路径);使y i彼此靠近使得路径更平滑,但更不真实于原始路径(像以上绿色路径)。
那如何做到使两个式子都最小化?可以通过最小化一个线性组合使得两个式子都最小化,

c1相对c2越大就越平滑,相反就越接近一个原点,找到这两个斗争的平衡点就能得到如上面红线一样的平滑路径。
模拟情形说明两项优化后路径为什么会平滑:
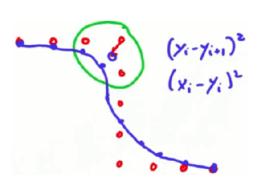
当把y移动远离x(可对除起始目的点的其他所有y点),产生y彼此之间距离越近更平滑的新的路径,同时第二个式子误差变小,但新的路径会使得第一个式子误差变大,但依靠权重c1和c2的设置能得到理想的路径,这个优化只优化中间的点,起始点和目的地点x,y一直相等。
如何做?
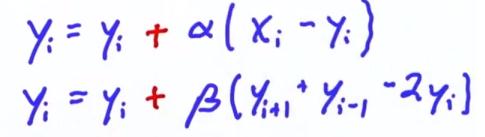
使用梯度下降,每一次迭代都沿着能减小误差的方向迈一小步,即每一步都对yi(除y0和yn-1)进行调整使得组合式子最小化:(这个算法红色部分原本是-,但这个模型里是+)
make code:
from math import *
path = [[0, 0],
[0, 1],
[0, 2],
[1, 2],
[2, 2],
[3, 2],
[4, 2],
[4, 3],
[4, 4]]
def smooth(path, weight_data = 0.5, weight_smooth = 0.1, tolerance = 0.000001):#tolerance是误差容忍变量
#将路径深度复制到newpath
newpath = [[0 for col in range(len(path[0]))] for row in range(len(path))]
for i in range(len(path)):
for j in range(len(path[0])):
newpath[i][j] = path[i][j] #迭代那两条表达式应用到除0和n外的每个路径点上
#迭代不会停止直到某次更新后总体变化比容忍误差值小
change = tolerance
while (change >= tolerance):
change = 0
for i in range(1,len(path)1):
for j in range(len(path[0])):
d1 = weight_data * (path[i][j] - newpath[i][j])
d2 = weight_smooth * (newpath[i1][j] + newpath[i+1][j] - 2 * newpath[i][j])
change += abs(d1 + d2)
newpath[i][j] += d1 + d2
return newpath
PID控制
假设车有可转向的前轮和固定的后轮,以固定速率向前行驶,希望它走平滑的路径,但只能控制前轮转向角度。三种选择:1.固定转向量(这会走圆圈)2.随机转向命令,按横切误差的某个比例来设置转向角度(横切误差CTE:车辆与参考航线间的垂直距离)3.让转向与横切误差成比例
应该选第三种,误差越大就越朝着参考航线设置一个更大的转向角,随着接近航线,转向角会变小,最终挨着航线。
这种转向控制叫做P controller,应用这种控制到达航线后仍会以一个小转角继续行驶然后再,所以这种转向控制下的行驶轨迹如下图(临界稳定):

#使用之前robot类,编写P控制器迭代100次机器人运动
#包含robot类中的__init__()、set()、set_noise()、move()、_repr_()
#转向角 steer = -tau * crosstrack_error(CTE)import random
import numpy as np
import matplotlib.pyplot as plt import proportional def run(param): #控制参数param就是转向角度与CTE之比,换句话说param = tau = steer/CTE
myrobot = robot()
myrobot.set(0.0, 1.0, 0.0)
speed = 1.0 # motion distance is equalt to speed (we assume time = 1)
N = 100 for i in range(N):
crosstrack_error = myrobot.y
steer = -param * crosstrack_error
myrobot = myroobo.move(steer,speed)
print myrobot, steer #run(0.1)
下一个问题是有办法避免越界吗?用PD控制
在PD控制里,转向角度alpha不仅由控制参数tau_p和横切误差CTE决定,也会与CTE关于时间的导数有关,

这里间隔时间设为1,那么:
这个式子中,它会注意到CTE随着时间的过去变小,当减小到一定程度它会反方向使车轮向上转动,不会冲过 x轴而是平缓地接近参考航线。
所以现在不是像在P控制器里以CTE的比例控制steer,还加入了第二个常数tau_d和CTE的微分项

def run(param1=0.2, param2=3.0):
myrobot = robot()
myrobot.set(0.0, 1.0, 0.0)
speed = 1.0
N = 100
crosstrack_error = myrobot.y
for i in range(N):
diff_crosstrack_error = myrobot.y crosstrack_error #微分项
crosstrack_error = myrobot.y
steer = param1 * crosstrack_errorparam2 * diff_crosstrack_error
myrobot = myrobot.move(steer, speed)
print myrobot, steer #run(0.2,3.0)
这里在初始时都是假定车轮对正前,但其实实际中车轮在开始时会有偏差角度,而这个问题P、PD都解决不了,(P会沿着一个常数震荡,PD会贴合一个常数),带来系统偏差的问题,为了解决这个问题,引入PID。
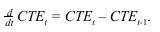
假如One people以系统误差(由前轮转向偏差带来的持续的巨大偏差)的轨迹行驶,一段时间后他发现没有接近预想轨迹,于是他开始往右打方向盘回到预想轨迹,这段时间的偏差可以用CTE基于时间的积分来衡量。然后,来编写新的控制器,它会根据CTE比例、CTE微分的某个比例、以及会受到CTE积分的比例影响,CTE积分就是历史所有观察到的CTE的和,它的累积可以矫正方向。

def run(param1, param2, param3):
myrobot = robot()
myrobot.set(0.0, 1.0, 0.0)
speed = 1.0 #假定速度是1
N = 100
myrobot.set_steering_drift(10.0 / 180.0 * pi) # 初始转向(造成系统偏差)
int_crosstrack_error = 0 #新变量
for i in range(N):
int_crosstrack_error += crosstrack_error
diff_crosstrack_error = myrobot.y crosstrack_error
crosstrack_error = myrobot.y
steer = param1 * crosstrack_error
- param2 * diff_crosstrack_error
- param3 * int_crosstrack_error
myrobot = myrobot.move(steer, speed)
print myrobot, steer
#run(0.2,3.0,0.004)
参数优化
使用一种称为“Twiddle”的算法,每次只调整一个参数直到找到最佳参数集合。
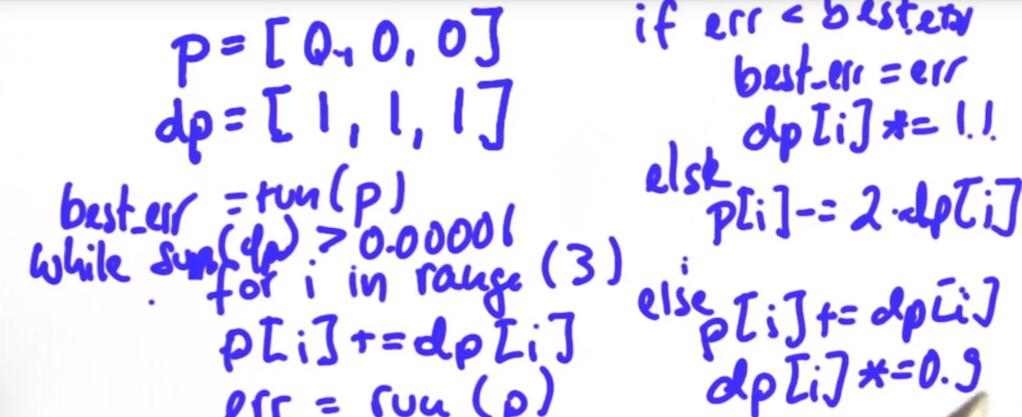
从一个参数向量 p = [0, 0, 0]开始,p将代表迄今为止最佳猜测参数集合,还将初始化一个向量dp = [1,1,1],代表想尝试的潜在变化。首先,在p中选择一个参数(比如这个例子中的p [0],尽管它可以是任何参数),并且通过dp中的对应值增加该参数(例如,如果p [0] == 1和dp [0] == 0.5,那么我们p [0]为1.5)。然后在run()中调用p,结果赋给best_error,然后遍历p,首先把p增加一个探索值,把这个值赋给error,留下更小的值更新best_error,然后把dp的值稍微增大(自乘1.1),否则减掉两个单位dp(因为之前加了一个单位),如果两个都失败了,p[i]变回原来的值,并且降低探索范围dp[i]的值(bug应该是减dp[i],比如自乘0.9)。只要dp之和大于阀值就会一直循环以上步骤。
#这里的params是三维向量
def run(params, printflag = False):
myrobot = robot()
myrobot.set(0.0, 1.0, 0.0)
speed = 1.0
err = 0.0
int_crosstrack_error = 0.0
N = 100
myrobot.set_steering_drift(10.0 / 180.0 * pi) #设置了10度的起始转向误差
crosstrack_error = myrobot.y for i in range(N * 2): #迭代2*N次PID
diff_crosstrack_error = myrobot.y crosstrack_error
crosstrack_error = myrobot.y
int_crosstrack_error += crosstrack_error
steer = params[0] * crosstrack_error \
- params[1] * diff_crosstrack_error \
- int_crosstrack_error * params[2]
myrobot = myrobot.move(steer, speed)
if i >= N: #在N次以后才开始统计,想观察CTE更显著的变化
err += (crosstrack_error ** 2)
if printflag:
print myrobot, steer
return err / float(N) #返回平均误差 def twiddle(tol = 0.2):
n_params = 3
dparams = [1.0 for row in range(n_params)]
params = [0.0 for row in range(n_params)]
best_error = run(params)
n = 0
while sum(dparams) > tol:
for i in range(len(params)):
params[i] += dparams[i]
err = run(params)
if err < best_error:
best_error = err
dparams[i] *= 1.1
else:
params[i] = 2.0 * dparams[i]
err = run(params)
if err < best_error:
best_error = err
dparams[i] *= 1.1
else:
params[i] += dparams[i]
dparams[i] *= 0.9
n += 1
print ‘Twiddle #’, n, params, ‘ > ‘, best_error
return run(params)

实验
下面尝试把积分项去掉,得到的是0积分增益,但是误差比上面的那个误差大一些,说明积分项对于让误差接近与0是必要的


然后尝试一下,令dparams[1] = 0,把微分项去掉,出现了0.55的误差!即使去掉drift误差也是巨大的。

实验在只有P情况下误差是0.1,PD下接近于0(没有drift情况下),而I(积分)是针对于有系统误差的机器人。
寻路器、平滑器、控制器可以应对大部分机器人的应用了,谷歌的还往里面加了料,它考虑了转向轮自有惯性的情况,
PID control的更多相关文章
- 增量与位置PID
转载:http://blog.sina.com.cn/s/blog_408540af0100b17n.html http://bbs.ednchina.com/BLOG_ARTICLE_211739. ...
- PID算法(c 语言)(转)
PID算法(c 语言)(来自老外) #include <stdio.h> #include<math.h> //定义PID 的结构体 struct _pid { int pv; ...
- PID算法(c 语言)(来自老外)
#include <stdio.h> #include<math.h> //定义PID 的结构体 struct _pid { int pv; // integer that c ...
- PID控制器(比例-积分-微分控制器)- V
Linear Actuator - PID Control Introduction This application guide is designed to explain the basics ...
- PID控制器(比例-积分-微分控制器)- III
PID Controller Algorithms Controller manufacturers arrange the Proportional, Integral and Derivative ...
- PID控制器(比例-积分-微分控制器)- II
Table of Contents Practical Process Control Proven Methods and Best Practices for Automatic PID Cont ...
- PID控制器(比例-积分-微分控制器)- I
形象解释PID算法 小明接到这样一个任务: 有一个水缸点漏水(而且漏水的速度还不一定固定不变),要求水面高度维持在某个位置,一旦发现水面高度低于要求位置,就要往水缸里加水. 小明接到任务后就一直守在水 ...
- Project 03- STM32F4xx PID controller
Project 03- STM32F4xx PID controller CMSIS files from ARM provides ARM Math functions. There are als ...
- PID算法(C语言)
/************ PID算法(C语言) ************/ #include <stdio.h> #include<math.h> struct _pid { ...
随机推荐
- 1_translation_1
It is always difficult to start describing a programming language because little details do not make ...
- cv2.error: openCV报错
运行openCV程序,出现了.cv2.error: OpenCV(4.1.0) D:\Build\OpenCV\opencv-4.1.0\modules\imgproc\src\color.cpp:1 ...
- Codeforces Round #442 (Div. 2) E Danil and a Part-time Job (dfs序加上一个线段树区间修改查询)
题意: 给出一个具有N个点的树,现在给出两种操作: 1.get x,表示询问以x作为根的子树中,1的个数. 2.pow x,表示将以x作为根的子树全部翻转(0变1,1变0). 思路:dfs序加上一个线 ...
- Educational Codeforces Round 30 D. Merge Sort
题意:给你n和k,n代表有多少个数,k代表几次操作,求一个1到n的序列,要k次mergesort操作才能还原 Examples Input 3 3 Output 2 1 3 Input 4 1 Out ...
- 提高GitHub下载速度
修改/etc/hosts 加上 151.101.72.249 GitHub.global.ssl.fastly.net 192.30.253.112 github.com
- 基于Dapper写的一个sqlhelp适用于多版本数据库
ConnectionInit方法用于初始化数据库连接对象, 只需要修改databasetype参数即可进行适用各个版本的数据库, ExecuteNonQuery方法用于执行增.删.改操作,返回受影响的 ...
- Git命令解释
pwd命令: Print Working Directory 显示工作目录的路径名称.
- Linux - 系统信息相关命令
系统信息相关命令 本节内容主要是为了方便通过远程终端维护服务器时,查看服务器上当前 系统日期和时间 / 磁盘空间占用情况 / 程序执行情况 本小结学习的终端命令基本都是查询命令,通过这些命令对系统资源 ...
- php用PDO查询mysql数据库结果中文乱码
中文都变成问号了 解决方法:在实例化pdo对象时语句中加上charset=utf8 $db = new PDO('dblib:host=your_hostname;dbname=your_db;cha ...
- Unity3d项目入门之打Apk包
②结合Android Studio编译器打安卓包 在安卓官网下载AS,按照步骤正常安装编译器完毕,运行AS,点击右下图的图标打开SDK Manager, 选择下载安装相关的“SDK Platform” ...