关于APIT定位算法的讨论
关于APIT定位算法的讨论
【摘要】 无线传感器网络节点定位机制的研究中,基于距离无关的定位技术得到快速发展,其中基于重叠区域的APIT定位技术在实际环境中的定位精度高,被广泛研究和应用。
【关键词】 无线传感器网络;定位算法;APIT;
【正文】
在传感网络中的许多应用中,用户一般都会关心一个重要问题,即特定时间发生的具体位置或区域。例如,目标跟踪,入侵检测,环境监控等,若不知道传感器自身的位置,感知的数据是没有意义的。因此,传感器网络及诶单必须知道自身所在的位置,才能够有效地说明被检测物体的位置,从而实现对外部目标的定位,跟踪等。
作为一种全新的技术,无线传感器网络具有许多挑战性的研究课题,定位技术就是其中之一,定位也是大多数应用的基础和前提。
目前定位技术主要有两个类型:给予测距的定位技术和基于非测距定位技术。
基于测距的定位技术涉及几何中的图形问题,已知节点的位置,求另几个节点的位置,比较常用的方法是三边定位和角度定位,这类算法比较简单,实现容易,但是他们受到电磁干扰,多径干扰等因素的影响。
基于非测距定位技术,无需利用这些基础设施来测量位置节点同信标节点之间的距离和角度这些信息,只需要根据未知节点是否连通,或者未知节点之间的跳数来度量。极大地降低了对环境的依赖性。在这篇文章中,我选取了其中具有代表性的APIT定位算法来进行讨论。
APIT定位算法
1. 初始
APIT(Approximate PIT) 定位算法的理论基础是最佳三角形内点测试法PIT(Perfect Point-In-Triangulation Test)。
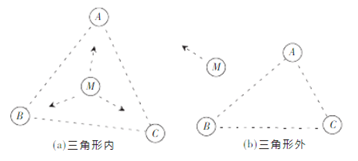
PIT理论为判断某一点M是否在三角形ABC内,假如存在一个方向,沿着这个方向M点会同时远离或者接近三角形ABC的三个顶点,那么M位于三角形ABC,否则位于三角形ABC外。
2. 优化
但是无线传感网络中大部分节点是静止的,不可能随意的像上述一样通过移动节点测试是否在三角形中,为了在静态网络中执行PIT测试,定义了APIT测试。
APIT定位算法最关键的步骤是测试未知节点是否在三个信标节点所组成的三角形内部。APIT算法是基于PIT测试原理的改进,可以领用WSN较高的节点密度和无线信息的传播特性来判断是否远离和靠近信标节点。通常在给定方向上,一个节点距离信标节点越远,接收信号的强度越弱。通过与邻居节点信息交换,来效仿PIT测试的节点移动。例如:
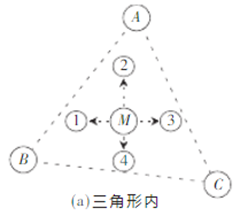
图a中,位置未知节点M通过与邻居节点1交换信息,得知自身如果运动到节点1,将远离信标B和C,但是会接近信标节点A,同样通过与邻居节点2,3,4交换信息,最终确定自身位于三角形ABC中。
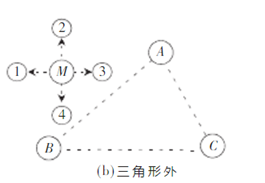
图b中,当节点通过邻居节点2得知,将会同时远离信标节点ABC,故判断自身不在三角形ABC中。
3. 确认
在APIT算法中,一个未知节点任选三个相邻信标节点,若通过测试发现自己位于他们所组成的三角形中,则认为该三角形的质心即为未知节点的位置,然后进一步选用不同信标节点的组合重复测试,直到穷尽所有组合或者达到所需定位精度为止;最后计算包含目标节点所有三角形的交集质心,并以此为未知节点的最终位置。
源码分析
本次实验均用matlab程序编写:
1. 初始化布局
C_random(area,node n,anchors_n,GPS_error): 参数:区域,节点数,信标节点,GPS误差。 function C_random(area,nodes_n,anchors_n,GPS_error) % deploy the nodes over a C-shaped region % area: the sensing region [ ] % the side is 200m-long, x=,y=,y=: the edge of C-shaped region % nodes_n: the number of nodes % anchors_n: the number of anchors % if anchors_n<, it means the ratio; % if anchors_n>, it means the number % GPS_error:the max location error of anchor raised by GPS, default is ; %~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~ % C_random([ ],,0.1) C_random([,,,],,0.2);
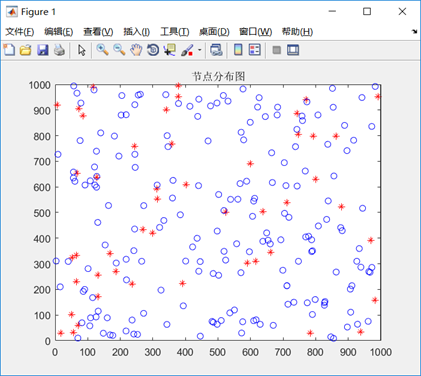
240个节点,其中48个锚节点
红色*表示锚节点,蓝色O表示未知节点
2. 计算未知节点坐标
if neighboring_anchor_n>=
gridmap=zeros(row_n,col_n);
grid_covered_flag=zeros(row_n,col_n);
for a=:neighboring_anchor_n-
for b=a+:neighboring_anchor_n-
for c=b+:neighboring_anchor_n
% 判断未知节点i是否在三角形abc内部
% Approximate P.I.T Test: "If no neighbor of M is further from/close to all three anchors A, B and C simultaneously,
% M assumes that it is inside triangle abc. Otherwise,M assumes it resides outside the triangle."
neighboring_node_index=setdiff(find(neighbor_matrix(i,:)==),neighboring_anchor_index([a b c]));
neighboring_node_rss_of_abc=neighbor_rss(neighboring_node_index,neighboring_anchor_index([a b c]));
in_out_judge=neighboring_node_rss_of_abc>repmat(neighbor_rss(i,neighboring_anchor_index([a b c])),length(neighboring_node_index),);
if any(sum(transpose(in_out_judge))==|sum(transpose(in_out_judge))==)%outside
Grid_in_triangle_abc=inpolygon(centroid_x,centroid_y,all_nodes.estimated(neighboring_anchor_index([a b c]),),all_nodes.estimated(neighboring_anchor_index([a b c]),));%被三角形abc覆盖到网络
gridmap=gridmap-Grid_in_triangle_abc;
else%inside
Grid_in_triangle_abc=inpolygon(centroid_x,centroid_y,all_nodes.estimated(neighboring_anchor_index([a b c]),),all_nodes.estimated(neighboring_anchor_index([a b c]),));%被三角形abc覆盖到网络
gridmap=gridmap+Grid_in_triangle_abc;
end
grid_covered_flag=grid_covered_flag|Grid_in_triangle_abc;
end
end
end
3. 定位误差
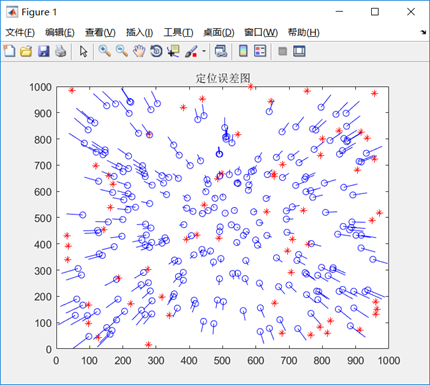
红色*表示锚节点
蓝色O表示未知节点的估计位置
黑色O表示不能被定位的未知节点
蓝色-表示未知节点的定位误差(连接未知节点的估计位置和真实位置)
一共300个节点:60个锚节点,240个未知节点,0个不能被定位的未知节点
定位误差为0.17819
算法总结
APIT定位的具体步骤如下所示:
l 收集信息:未知节点收集邻近信标节点的信息。
l APIT测试:测试未知节点是否在不同的信标节点组合的三角形内部。
l 计算重叠区域:统计包含未知节点的三角形,计算所有三角形的重叠区域。
l 计算未知节点位置:计算重叠区域的质心位置,作为位置节点的位置。
展望与发展
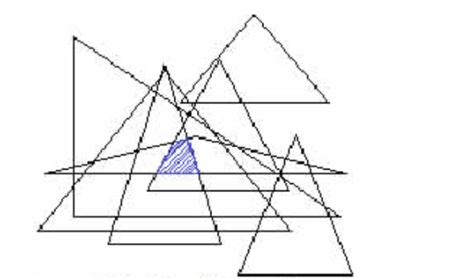
在整个无线传感器网络的边缘地区,传感器的数量相对比较少,信标节点较少,这样组成的三角形的数量也会降低。在进行APIT测试定位时,会出现由于重叠区域过大而造成实际位置与定位位置偏差过大的现象。如图所示,是运用APIT定位误差较大的一种情况。
为了提高无线传感器网络的定位精度,APIT算法需要继续改进,现已有很多专家学者进行过讨论,这里只举例其中两种:
l 将三角形进行中垂线分割成4个或者6个小区间,通过对各个目标节点收到目标节点信号的强度进行比较,判断目标节点位于哪一个小区间中。
l 通过任意一个信标节点对另外两个信标节点所在直线作垂线得到垂直交点,通过比较这个信标点到交点的距离和他与位置节点的距离的关系,初步判断未知节点未知,同时,通过加权质心定位算法得到未知节点的精确估计。
参考文献
【1】 刘伟荣,何云. 物联网与无线传感器网络
【2】 唐明虎,张长宏. 无线传感器网络APIT定位算法
【3】 张冬冬,常用定位技术的实现
【4】 海子,www.cnblogs.com/dolphin0520
【5】 戴天虹,李昊,基于改进APIT算法的无线传感器网络节点定位
【6】 杨凌云,冯友宏,垂直交点APIT定位改进算法
关于APIT定位算法的讨论的更多相关文章
- [CLPR] 定位算法探幽 - 边缘和形态学
一. 引言 如何从一副图片中找到车牌? 这是机器视觉的一个应用. 理所当然地, 思考的角度是从车牌本身的信息入手, 为了讨论方便, 下面均以长窄型蓝白车牌为例. 下图就是这样一张车牌的基本信息. 一眼 ...
- Trilateration三边测量定位算法
转载自Jiaxing / 2014年2月22日 基本原理 Trilateration(三边测量)是一种常用的定位算法: 已知三点位置 (x1, y1), (x2, y2), (x3, y3) 已知未知 ...
- LED室内定位算法:RSS,TOA,AOA,TDOA(转载)
转载自:https://blog.csdn.net/baidu_38197452/article/details/77115935 基于LED的室内定位算法大致可以分为四类: 1. 几何测量法 这种方 ...
- 基于麦克风阵列的声源定位算法之GCC-PHAT
目前基于麦克风阵列的声源定位方法大致可以分为三类:基于最大输出功率的可控波束形成技术.基于高分辨率谱图估计技术和基于声音时间差(time-delay estimation,TDE)的声源定位技术. 基 ...
- 伪距定位算法(matlab版)
在各种伪距定位算法中,最小二乘法是一种比较简单而广泛的方法,该算法可以分为以下几步: 1.准备数据与设置初始值 这里准备数据,主要是对于各颗可见卫星,收集到它们在同一时刻的伪距测量值,计算测量值的各项 ...
- SIFT定位算法关键步骤的说明
1. SIFT算法中一些符号的说明 $I(x,y)$表示原图像. $G(x,y,\sigma)$表示高斯滤波器,其中$G(x,y,\sigma) = \frac{1}{2\pi\sigma^2}exp ...
- mser 最大稳定极值区域(文字区域定位)算法 附完整C代码
mser 的全称:Maximally Stable Extremal Regions 第一次听说这个算法时,是来自当时部门的一个同事, 提及到他的项目用它来做文字区域的定位,对这个算法做了一些优化. ...
- 从时序异常检测(Time series anomaly detection algorithm)算法原理讨论到时序异常检测应用的思考
1. 主要观点总结 0x1:什么场景下应用时序算法有效 历史数据可以被用来预测未来数据,对于一些周期性或者趋势性较强的时间序列领域问题,时序分解和时序预测算法可以发挥较好的作用,例如: 四季与天气的关 ...
- 基于Ubuntu1604+ROS-kinetic+roscpp的激光雷达定位算法从零开始移植
调试的过程太麻烦了,因此打算详细解释一下每步的含义,很多地方懂了之后发现其实很简单,但是学起来却发现很多地方无从下手,因为资料太少了,真的都是不断踩坑一点一点摸索出来的,写以此文以便后人乘凉 此处将展 ...
随机推荐
- 打ms15-034补丁出现“此更新 不适用于您的计算机”
1.MS15-034漏洞的补丁是KB3042553; 2.如果在一台Windows Server 2012 R2的服务器上直接安装补丁文件KB3042553,可能会出现“此更新 不适用于您的计算机”的 ...
- Android应用中添加Log4j的示例
[2016-06-30]最新的log4j已经集成在DR_support_lib库中 具体请看: https://coding.net/u/wrcold520/p/DR_support_lib/git/ ...
- linux 命令之重定向
linux 重定向及部分命令 一,重定向讲解: 1> 标准输出重定向 覆盖原有内容 慎用!!!!!! 1>> 标准输出追加重定向 追加内容 2> 错误输出重定向 只输出错误信息 ...
- SpringMvc上传文件遇到重复读取InputStream的问题
文件上传配置: <bean id="multipartResolver" class="org.springframework.web.multipart.comm ...
- Column 'orders' in order clause is ambiguous
今天报了这个错误 原因是.当使用sql查询语句,使用了join查表.但是这个orders没指定是哪张表的字段 ,发生在自关联情况
- 如何在DIV内只要垂直滚动条,不要水平滚动条
<DIV style="OVERFLOW-Y: scroll; OVERFLOW-X:hidden; width: 685px; height: 180px">< ...
- 【Openvpn】iOS OpenVPN客户端设置指南(适用iPhone/iPad)
适用于iPhone/iPad/这些iOS设备.之前iOS使用OpenVPN是需要越狱的,并且是付费第三方应用. 去年开始OpenVPN官方推出了iOS客户端就好用多了,免费也无需越狱. 说明:如果是新 ...
- 深入理解JavaScript系列(12):变量对象(Variable Object)
介绍 JavaScript编程的时候总避免不了声明函数和变量,以成功构建我们的系统,但是解释器是如何并且在什么地方去查找这些函数和变量呢?我们引用这些对象的时候究竟发生了什么? 原始发布:Dmitry ...
- c# winform 欢迎界面时加载数据
using System; using System.Collections.Generic; using System.ComponentModel; using System.Data; usin ...
- python搭建本地服务器
python搭建本地服务器 python3以上版本 'python3 -m http.server 8000' 默认是8000端口,可以指定端口,打开浏览器输入http://127.0.0.1:800 ...