Pylon5 SDK搭配OpenCV使用入门
本文假设已经安装了Basler官网提供的Pylon
目前最新的版本是5.0.5,如果上述链接打不开,请直接所有Basler官网下载,需要注意的是在安装Pylon5时要选择Developer模式,这样才会安装关于pylon5 SDK开发包,安装完可以到安装路径下找到,软件也会自动将一些路径自动添加到系统环境变量。

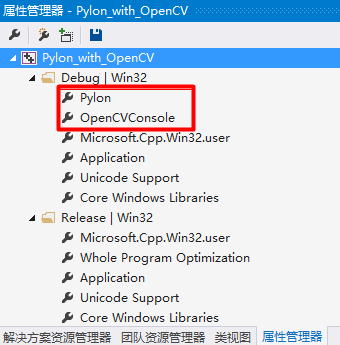
使用Pylon5 SDK开发与使用OpenCV开发一些功能流程一样,无非是引入包目录(include)和库包含目录(lib),本文使用的OpenCV版本为2.4.9.。。关于工程如何配置,我不想说话,只扔出两张属性表。
Pylon.props
<?xml version="1.0" encoding="utf-8"?>
<Project ToolsVersion="4.0" xmlns="http://schemas.microsoft.com/developer/msbuild/2003">
<ImportGroup Label="PropertySheets" />
<PropertyGroup Label="UserMacros" />
<PropertyGroup />
<ItemDefinitionGroup>
<ClCompile>
<AdditionalIncludeDirectories>$(PYLON_DEV_DIR)\include;%(AdditionalIncludeDirectories)</AdditionalIncludeDirectories>
</ClCompile>
<Link>
<AdditionalLibraryDirectories>$(PYLON_DEV_DIR)\lib\win32;%(AdditionalLibraryDirectories)</AdditionalLibraryDirectories>
</Link>
</ItemDefinitionGroup>
<ItemGroup />
</Project>
OpenCVConsole.props
<?xml version="1.0" encoding="utf-8"?>
<Project ToolsVersion="4.0" xmlns="http://schemas.microsoft.com/developer/msbuild/2003">
<ImportGroup Label="PropertySheets" />
<PropertyGroup Label="UserMacros" />
<PropertyGroup>
<IncludePath>$(OPENCV_ROOT)\include;$(IncludePath)</IncludePath>
<LibraryPath Condition="'$(Platform)'=='Win32'">$(OPENCV_ROOT)\x86\vc12\lib;$(LibraryPath)</LibraryPath>
<LibraryPath Condition="'$(Platform)'=='X64'">$(OPENCV_ROOT)\x64\vc12\lib;$(LibraryPath)</LibraryPath>
</PropertyGroup>
<ItemDefinitionGroup>
<Link Condition="'$(Configuration)'=='Debug'">
<AdditionalDependencies>opencv_calib3d249d.lib;opencv_contrib249d.lib;opencv_core249d.lib;opencv_features2d249d.lib;opencv_flann249d.lib;opencv_gpu249d.lib;opencv_highgui249d.lib;opencv_imgproc249d.lib;opencv_legacy249d.lib;opencv_ml249d.lib;opencv_nonfree249d.lib;opencv_objdetect249d.lib;opencv_ocl249d.lib;opencv_photo249d.lib;opencv_stitching249d.lib;opencv_superres249d.lib;opencv_ts249d.lib;opencv_video249d.lib;opencv_videostab249d.lib;%(AdditionalDependencies)</AdditionalDependencies>
</Link>
<Link Condition="'$(Configuration)'=='Release'">
<AdditionalDependencies>opencv_calib3d249.lib;opencv_contrib249.lib;opencv_core249.lib;opencv_features2d249.lib;opencv_flann249.lib;opencv_gpu249.lib;opencv_highgui249.lib;opencv_imgproc249.lib;opencv_legacy249.lib;opencv_ml249.lib;opencv_nonfree249.lib;opencv_objdetect249.lib;opencv_ocl249.lib;opencv_photo249.lib;opencv_stitching249.lib;opencv_superres249.lib;opencv_ts249.lib;opencv_video249.lib;opencv_videostab249.lib;%(AdditionalDependencies)</AdditionalDependencies>
</Link>
<ClCompile>
<PreprocessorDefinitions>_CRT_SECURE_NO_WARNINGS;%(PreprocessorDefinitions)</PreprocessorDefinitions>
</ClCompile>
</ItemDefinitionGroup>
<ItemGroup />
</Project>
注意根据本机的库安装地址可能要修改上面的属性表文件,只需要到属性管理器窗口添加现有属性表就好了。如果没有属性窗口,请到VS视图菜单中打开。
使用Pylon5 SDK搭配OpenCV采集图像程序流程如下:
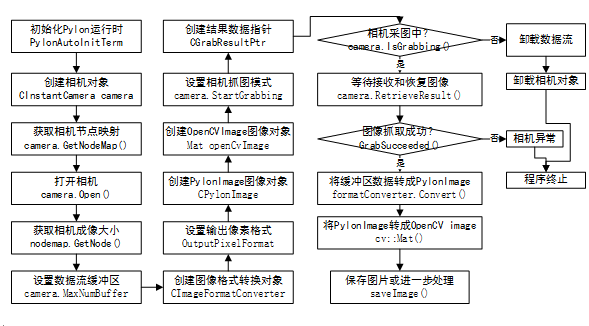
下面是完整的源代码,该工程使用Basler piA2400-17gc GigE 相机测试成功。
//定义是否保存图片
#define saveImages 1
//定义是否记录视频
#define recordVideo 1
// 加载OpenCV API
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/video/video.hpp>
//加载PYLON API.
#include <pylon/PylonIncludes.h>
#include<iostream>
#ifdef PYLON_WIN_BUILD
#include <pylon/PylonGUI.h>
#endif
//命名空间.
using namespace Pylon;
using namespace cv;
using namespace std;
//定义抓取的图像数
static const uint32_t c_countOfImagesToGrab = 10;
void main()
{
//Pylon自动初始化和终止
Pylon::PylonAutoInitTerm autoInitTerm;
try
{
//创建相机对象(以最先识别的相机)
CInstantCamera camera(CTlFactory::GetInstance().CreateFirstDevice());
// 打印相机的名称
std::cout << "Using device " << camera.GetDeviceInfo().GetModelName() << endl;
//获取相机节点映射以获得相机参数
GenApi::INodeMap& nodemap = camera.GetNodeMap();
//打开相机
camera.Open();
//获取相机成像宽度和高度
GenApi::CIntegerPtr width = nodemap.GetNode("Width");
GenApi::CIntegerPtr height = nodemap.GetNode("Height");
//设置相机最大缓冲区,默认为10
camera.MaxNumBuffer = 5;
// 新建pylon ImageFormatConverter对象.
CImageFormatConverter formatConverter;
//确定输出像素格式
formatConverter.OutputPixelFormat = PixelType_BGR8packed;
// 创建一个Pylonlmage后续将用来创建OpenCV images
CPylonImage pylonImage;
//声明一个整形变量用来计数抓取的图像,以及创建文件名索引
int grabbedlmages = 0;
// 新建一个OpenCV video creator对象.
VideoWriter cvVideoCreator;
//新建一个OpenCV image对象.
Mat openCvImage;
// 视频文件名
std::string videoFileName = "openCvVideo.avi";
// 定义视频帧大小
cv::Size frameSize = Size((int)width->GetValue(), (int)height->GetValue());
//设置视频编码类型和帧率,有三种选择
// 帧率必须小于等于相机成像帧率
cvVideoCreator.open(videoFileName, CV_FOURCC('D', 'I', 'V','X'), 10, frameSize, true);
//cvVideoCreator.open(videoFileName, CV_F0URCC('M','P',,4','2’), 20, frameSize, true);
//cvVideoCreator.open(videoFileName, CV_FOURCC('M', '3', 'P', 'G'), 20, frameSize, true);
// 开始抓取c_countOfImagesToGrab images.
//相机默认设置连续抓取模式
camera.StartGrabbing(c_countOfImagesToGrab, GrabStrategy_LatestImageOnly);
//抓取结果数据指针
CGrabResultPtr ptrGrabResult;
// 当c_countOfImagesToGrab images获取恢复成功时,Camera.StopGrabbing()
//被RetrieveResult()方法自动调用停止抓取
while (camera.IsGrabbing())
{
// 等待接收和恢复图像,超时时间设置为5000 ms.
camera.RetrieveResult(5000, ptrGrabResult, TimeoutHandling_ThrowException);
//如果图像抓取成功
if (ptrGrabResult->GrabSucceeded())
{
// 获取图像数据
cout <<"SizeX: "<<ptrGrabResult->GetWidth()<<endl;
cout <<"SizeY: "<<ptrGrabResult->GetHeight()<<endl;
//将抓取的缓冲数据转化成pylon image.
formatConverter.Convert(pylonImage, ptrGrabResult);
// 将 pylon image转成OpenCV image.
openCvImage = cv::Mat(ptrGrabResult->GetHeight(), ptrGrabResult->GetWidth(), CV_8UC3, (uint8_t *) pylonImage.GetBuffer());
//如果需要保存图片
if (saveImages)
{
std::ostringstream s;
// 按索引定义文件名存储图片
s << "image_" << grabbedlmages << ".jpg";
std::string imageName(s.str());
//保存OpenCV image.
imwrite(imageName, openCvImage);
grabbedlmages++;
}
//如果需要记录视频
if (recordVideo)
{
cvVideoCreator.write(openCvImage);
}
//新建OpenCV display window.
namedWindow("OpenCV Display Window", CV_WINDOW_NORMAL); // other options: CV_AUTOSIZE, CV_FREERATIO
//显示及时影像.
imshow("OpenCV Display Window", openCvImage);
// Define a timeout for customer's input in
// '0' means indefinite, i.e. the next image will be displayed after closing the window.
// '1' means live stream
waitKey(0);
}
}
}
catch (GenICam::GenericException &e)
{
// Error handling.
cerr << "An exception occurred." << endl
<< e.GetDescription() << endl;
}
return;
}
参考文档:
Application_Note_Build_pylon_C++_Apps_with_Free_Visual_Studio_IDE
Getting_Started_with_pylon5_and_OpenCV
Pylon5 SDK搭配OpenCV使用入门的更多相关文章
- opencv编程入门技巧
opencv编程入门技巧 最近在项目中负责图像处理模块的编程工作,主要分为两个板块,一是视频图像去雾,二是可视.红外图像融合.为了提升开发效率,遂开始学习并使用opencv图像类库,效果很好的说~因为 ...
- PIE SDK与OpenCV结合说明文档
1.功能简介 OpenCV是基于BSD许可(开源)发行的跨平台计算机视觉库,可以运行在Linux.Windows.Android和Mac OS操作系统上.它轻量级而且高效——由一系列 C 函数和少量 ...
- OpenCV编程入门目录
第一部分 快速上手OpenCV 第1 章 邂逅OpenCV 图像处理.计算机视觉与OpenCV OpenCV 概述 起源及发展 应用概述 .2OpenCV 基本架构分析 .3OpenCV3 带来了什么 ...
- openCV从入门到放弃
与图像处理之间的关系,opencv的简介和使用定位 如题...因为偶然的机会需要用到图像处理,像我这么爱学习 并且动手能力又强的人怎么能没有心得笔记呢,哇哈哈哈.非要说的low逼点这玩意儿这玩意儿就是 ...
- OpenCV从入门到放弃系列之——如何扫描图像、利用查找表和计时
目的 如何遍历图像中的每一个像素? OpenCV的矩阵值是如何存储的? 如何测试我们所实现算法的性能? 查找表是什么?为什么要用它? 测试用例 颜色空间缩减.具体做法就是:将现有颜色空间值除以某个输入 ...
- OpenCV从入门到放弃系列之——core模块.核心功能(一)
Mat - 基本图像容器 世间的图像是各种各样的,但是到了计算机的世界里所有的图像都简化为了数值矩以及矩阵信息.作为一个计算视觉库,OpenCV的主要目的就是处理和操作这些信息,来获取更高级的信息,也 ...
- OpenCV从入门到放弃系列之——图像的基本操作
读取.修改.保存图像 图像读取函数imread(); 图像颜色空间的转换cvtColor(); 图像保存至硬盘imwrite(); /********************************* ...
- Opencv 3入门(毛星云)摘要
第一章 环境搭建: 1. 环境变量path 添加 D:\Program Files\opencv\build\x86\vc11\bin 2. VS在VC++项目中,属性管理器\属性. VC++目 ...
- opencv 学习入门篇
unbuntu 安装:http://blog.csdn.net/cocoaqin/article/details/78163171 windows 安装:https://jingyan.baidu.c ...
随机推荐
- 网络基础之HTTP、TCP/IP、Socket
一.HTTP相关 https://www.cnblogs.com/sunny-sl/p/6529830.html https://www.cnblogs.com/ranyonsue/p/5984001 ...
- Magento2 Service contracts 服务合同
服务合同 Magento是一个模块化系统,它使第三方开发人员能够定制和覆盖其框架的核心部分.然而,这种灵活性是有代价的. 业务逻辑倾向于泄漏Magento系统的各个层,这表现为重复且不一致的代码. 商 ...
- Java项目模板设置
/** * * @ClassName ${PACKAGE_NAME}.${NAME} * @description ${DESCRIPTION} * @author lisongyu * @creat ...
- 编写高质量的Python代码系列(一)之用Pythonic方式来思考
Python开发者用Pythonic这个形容词来描述具有特定风格的代码.这种风格是大家在使用Python语言进行编程并相互协作的过程中逐渐形成的习惯.那么,如何以改风格完成常见的Python编程工作呢 ...
- KNN算法的实现
K近邻(KNN)算法简介 KNN是通过测量不同特征值之间的距离进行分类.它的思路是:如果一个样本在特征空间中的k个最相似(即特征空间中最邻近)的样本中的大多数属于某一个类别,则该样本也属于这个类别,其 ...
- 金融量化分析【day112】:股票数据分析Tushare2
目录 1.使用tushare包获取某股票的历史行情数据 2.使用pandas包计算该股票历史数据的5日局限和60日均线 3.matplotlib包可视化历史数据的收盘价和历史均线 4.分析输出所有金叉 ...
- ubuntu文件搜索统计
一.在ubuntu下如何搜索文件 1.特点:快速,但是是模糊查找,例如 找 #whereis mysql 它会把mysql,mysql.ini,mysql.*所在的目录都找出来.我一般的查找都用这条命 ...
- 第十三节: EF的三种模式(三) 之 来自数据库的CodeFirst模式
一. 简介 [来自数据库的Code First模式]实质上并不是CodeFirst模式,而是DBFirst模式的轻量级版本,在该模式中取消了edmx模型和T4模板,直接生成了EF上下文和相应的类,该模 ...
- 第九节:基于MVC5+AutoFac+EF+Log4Net的基础结构搭建
一. 前言 从本节开始,将陆续的介绍几种框架搭建组合形式,分析每种搭建形式的优势和弊端,剖析搭建过程中涉及到的一些思想和技巧. (一). 技术选型 1. DotNet框架:4.6 2. 数据库访问:E ...
- redis发布/订阅
发布订阅简介 Redis 发布订阅(pub/sub)是一种消息通信模式:发送者(pub)发送消息,订阅者(sub)接收消息,消息之间通过channel传递. 准备工作 两台安装了redis的机器(虚拟 ...