浅谈压缩感知(十五):感知矩阵之spark常数
在压缩感知中,有一些用来评价感知矩阵(非测量矩阵)的指标,如常见的RIP等,除了RIP之外,spark常数也能够用来衡量能否成为合适的感知矩阵。
0、相关概念与符号

1、零空间条件NULL Space Condition
在介绍spark之前,先考虑一下感知矩阵的零空间。

这里从矩阵的零空间来考虑测量矩阵需满足的条件:对于K稀疏的信号x,当且仅当测量矩阵的零空间与2K个基向量张成的线性空间没有交集,或者说零空间中的向量不在2K个基向量张成的线性空间中。
上述描述的性质似乎有点难懂,那么与之等价的表述就是spark常数。

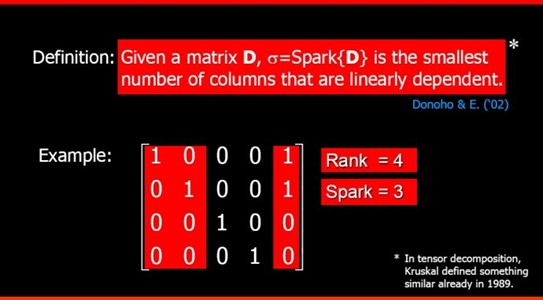
2、spark常数定义
简单来说就是,矩阵列线性相关向量组的最小数目。(注意,这里的矩阵指的是感知矩阵,即 ,并非测量矩阵或稀疏基)
,并非测量矩阵或稀疏基)

3、spark评价定理
当且仅当spark(Φ)>2k时,可以通过最小0范数优化问题得到k-稀疏信号x的精确近似。

4、线性相关
定义:
定理:
性质:
5、定理证明

反证法。
第一步证明:对于任意的向量y,存在至多一个K稀疏的信号x,使得 ,则
,则 。
。
证明:假设 ,即根据定义感知矩阵的线性相关列小于或等于2K,从线性相关的定义出发,
,即根据定义感知矩阵的线性相关列小于或等于2K,从线性相关的定义出发,
存在某个向量 ,即
,即 ,使得
,使得 且h不等于0。
且h不等于0。
由于 ,则h可以表示为:
,则h可以表示为:
 ,因此
,因此
从而得到 。
。
但是我们的条件中说明了至多只有一个K稀疏的信号x,因此与原条件矛盾,故假设不成立,原命题成立。
第二步证明:对于任意的向量y,满足 且
且 的K稀疏信号x至多有一个。
的K稀疏信号x至多有一个。
证明:假设K稀疏信号x至少有两个,设为 ,则
,则
 。
。
因为 ,即根据定义感知矩阵的线性相关列大于2K,从线性相关的定义出发,
,即根据定义感知矩阵的线性相关列大于2K,从线性相关的定义出发,
存在某个向量 ,使得
,使得 ,且h不等于0。而感知矩阵的零空间应该大于2K维,而假设中的h所在子空间小于或等于2K维,要满足
,且h不等于0。而感知矩阵的零空间应该大于2K维,而假设中的h所在子空间小于或等于2K维,要满足 ,当且仅当h=0的时候,即
,当且仅当h=0的时候,即 ,与原假设矛盾,因此假设不成立,原命题成立。
,与原假设矛盾,因此假设不成立,原命题成立。
6、spark常数与矩阵的秩
虽然spark与秩(rank)在某些方面很相似,但它们实际上是完全不同的,矩阵的秩是最大的线性无关的列数,而Spark是最小的线性相关的列数;有的时候矩阵满秩但spark=2。
还是通过例子理解吧:

浅谈压缩感知(十五):感知矩阵之spark常数的更多相关文章
- 浅谈压缩感知(二十):OMP与压缩感知
主要内容: OMP在稀疏分解与压缩感知中的异同 压缩感知通过OMP重构信号的唯一性 一.OMP在稀疏分解与压缩感知中的异同 .稀疏分解要解决的问题是在冗余字典(超完备字典)A中选出k列,用这k列的线性 ...
- 浅谈压缩感知(二十四):压缩感知重构算法之子空间追踪(SP)
主要内容: SP的算法流程 SP的MATLAB实现 一维信号的实验与结果 测量数M与重构成功概率关系的实验与结果 SP与CoSaMP的性能比较 一.SP的算法流程 压缩采样匹配追踪(CoSaMP)与子 ...
- 浅谈压缩感知(二十一):压缩感知重构算法之正交匹配追踪(OMP)
主要内容: OMP的算法流程 OMP的MATLAB实现 一维信号的实验与结果 测量数M与重构成功概率关系的实验与结果 稀疏度K与重构成功概率关系的实验与结果 一.OMP的算法流程 二.OMP的MATL ...
- []转帖] 浅谈Linux下的五种I/O模型
浅谈Linux下的五种I/O模型 https://www.cnblogs.com/chy2055/p/5220793.html 一.关于I/O模型的引出 我们都知道,为了OS的安全性等的考虑,进程是 ...
- 浅谈压缩感知(十六):感知矩阵之RIP
在压缩感知中,总是看到"矩阵满足RIP"之类的字眼,没错,这是一个压缩感知绕不开的术语,有限等距性质(Restricted Isometry Property, RIP). 注意: ...
- 【原创】浅谈指针(十二)关于static(上)
0.前言 这个系列基本上是一月一更到两月一更 今天写一篇关于static的,内含大量干货,做好准备 1.基础知识的回顾 1.1.内存的种类 一般来说,我们之前已经讲过的变量(或者说是内存)可以大体分为 ...
- 浅谈压缩感知(二十五):压缩感知重构算法之分段正交匹配追踪(StOMP)
主要内容: StOMP的算法流程 StOMP的MATLAB实现 一维信号的实验与结果 门限参数Ts.测量数M与重构成功概率关系的实验与结果 一.StOMP的算法流程 分段正交匹配追踪(Stagewis ...
- 浅谈压缩感知(十四):傅里叶矩阵与小波变换矩阵的MATLAB实现
主要内容: 傅里叶矩阵及其MATLAB实现 小波变换矩阵及其MATLAB实现 傅里叶矩阵及其MATLAB实现 傅里叶矩阵的定义:(来源: http://mathworld.wolfram.com/F ...
- 浅谈压缩感知(二十六):压缩感知重构算法之分段弱正交匹配追踪(SWOMP)
主要内容: SWOMP的算法流程 SWOMP的MATLAB实现 一维信号的实验与结果 门限参数a.测量数M与重构成功概率关系的实验与结果 SWOMP与StOMP性能比较 一.SWOMP的算法流程 分段 ...
随机推荐
- 有谁知道Delphi中"窗口"的创建过程?
求助:有谁知道Delphi中窗口的创建过程,此“窗口”不仅仅指 TForm 类型, 还包括一般的窗口控件,如TButton,TEdit等等,希望有能够十分详细的运作 过程,比如说CreatPara ...
- ICE概述
网络通信引擎(Internet Communications Engine, Ice)是由ZeroC的分布式系统开发专家实现的一种高性能.面向对象的中间件平台.它号称标准统一,开源,跨平台,跨语言,分 ...
- 连接ORACLE数据库,是不是必须要安装oracle客户端的运行时
大神给的回答: net连接oracle使用的是oci接口,必须安装oracle客户端,并配置本地网络服务名 tnsnames.ora.不过oracle网站有精简版的客户端软件,不到30M吧,解压,并编 ...
- ArcGIS教程:树状图
摘要 构造可显示特征文件里连续合并类之间的属性距离的树示意图(树状图). 使用方法 · 输入特征文件必须採用预定的特征文件格式. 特征文件可使用 Iso 聚类或创建特征工具来创建.该文件必须至少包括两 ...
- fabric工具
./cryptogen generate --output="a" --config=crypto-config.yaml # Copyright IBM Corp. All Ri ...
- 低版本系统兼容的ActionBar(三)自定义Item视图+进度条的实现+下拉导航+透明ActionBar
一.自定义MenuItem的视图 custom_view.xml (就是一个单选按钮) <?xml version="1.0" encoding="u ...
- attrs.xml中declare-styleable 详解(用于自定义控件的属性)
1. 框架定义: <declare-styleable name = "名称"> <attr name = "……" format = &qu ...
- Eclipse 汉化的和修改字体的方法
先进入 http://www.eclipse.org/babel/downloads.php 找到自己对应版本的网址,然后复制下来. 然后,进入eclipse.点工具栏上的Help - Install ...
- JAVA生成并导出json文件
将一个list集合转换成json文件并导出: 数据集合: List<Object> agencyList = new ArrayList<Object>(); Map<S ...
- junit5了解一下
要求java8及以上版本 JUnit 5 = JUnit Platform + JUnit Jupiter + JUnit Vintage https://junit.org/junit5/docs/ ...