logistic回归学习
logistic回归是一种分类方法,用于两分类的问题,其基本思想为:
- 寻找合适的假设函数,即分类函数,用来预测输入数据的结果;
- 构造损失函数,用来表示预测的输出结果与训练数据中实际类别之间的偏差;
- 最小化损失函数,从而获得最优的模型参数。
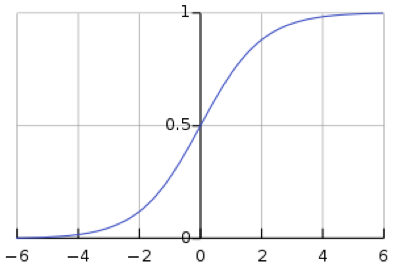
首先来看一下sigmoid函数:
\(g(x)=\frac{1}{1-e^{x}}\)
它的函数图像为:
logistic回归中的假设函数(分类函数):
\(h_{\theta }(x)=g(\theta ^{T}x)=\frac{1}{1+e^{-\theta ^{T}x}}\)
解释:
\(\theta \) —— 我们在后面要求取的参数;
\(T\) —— 向量的转置,默认的向量都是列向量;
\(\theta ^{T}x\) —— 列向量\(\theta\)先转置,然后与\(x\)进行点乘,比如:
\(\begin{bmatrix}1\\ -1\\ 3\end{bmatrix}^{T}\begin{bmatrix}1\\ 1\\ -1\end{bmatrix} = \begin{bmatrix}1 & -1 & 3\end{bmatrix}\begin{bmatrix}1\\ 1\\ -1\end{bmatrix}=1\times 1+(-1)\times1+3\times(-1) = -3\)
logistic分类有线性边界和非线性边界两种:
线性边界形式为:\(\theta_{0}+\theta_{1}x_{1}+\cdots+\theta_{n}x_{n}=\sum_{i=0}^{n}\theta_{i}x_{i}=\theta^{T}x\)
非线性边界的形式为:\(\theta_{0}+\theta_{1}x_{1}+\theta_{2}x_{2}+\theta_{3}x_{1}^{2}+\theta_{4}x_{2}^{2}\)
在概率上计算输入\(x\)结果为1或者0的概率分别为:
\(P(y=1|x;\theta)=h_{\theta}(x)\)
\(P(y=0|x;\theta)=1-h_{\theta}(x)\)
损失函数被定义为:\(J(\theta)=\frac{1}{m}\sum_{m}^{i=1}cost(h_{\theta}(x^{i}), y^{i})\)
其中:
这里\(m\)是所有训练样本的数目;
\(cost(h_{\theta}(x), y)=\left\{\begin{matrix}\ \ \ \ \ -log(h_{\theta}(x)) \ \ \ if\ y=1\\ -log(1-h_{\theta}(x)) \ \ \ if \ y=0\end{matrix}\right.\)
\(cost\)的另一种形式是:\(cost(h_{\theta}(x), y)=-y\times log(h_{\theta}(x))-(1-y)\times log(1-h_{\theta}(x))\)
将\(cost\)代入到\(J(\theta)\)中可以得到损失函数如下:
\(J(\theta)=-\frac{1}{m}[\sum_{m}^{i=1}y^{(i)}logh_{\theta}(x^{(i)})+(1-y^{(i)})log(1-h_{\theta}(x^{(i)}))]\)
梯度法求\(J(\theta)\)的最小值
\(\theta\)的更新过程如下:
\(\theta_{j}:=\theta_{j}-\alpha\frac{\partial }{\partial\theta_{j}}J(\theta),\ \ \ (j=0\cdots n)\)
其中:\(\alpha\)是学习步长。
\(\begin{align*} \frac{\partial }{\partial\theta_{j}}J(\theta) &= -\frac{1}{m}\sum_{m}^{i=1}\left ( y^{(i)}\frac{1}{h_{\theta}(x^{(i)})} \frac{\partial }{\partial\theta_{j}}h_{\theta}(x^{(i)})-(1-y^{(i)})\frac{1}{1-h_{\theta}(x^{(i)})}\frac{\partial }{\partial\theta_{j}}h_{\theta}(x^{(i)})\right ) \\ &=-\frac{1}{m}\sum_{m}^{i=1}\left ( y^{(i)}\frac{1}{g\left ( \theta^{T}x^{(i)} \right )}-\left ( 1-y^{(i)} \right )\frac{1}{1-g\left ( \theta^{T}x^{(i)} \right )} \right )\frac{\partial }{\partial\theta_{j}}g\left ( \theta^{T}x^{(i)} \right ) \\ &= -\frac{1}{m}\sum_{m}^{i=1}\left ( y^{(i)}\frac{1}{g\left ( \theta^{T}x^{(i)} \right )}-\left ( 1-y^{(i)} \right )\frac{1}{1-g\left ( \theta^{T}x^{(i)} \right )} \right ) g\left ( \theta^{T}x^{(i)} \right ) \left ( 1-g\left ( \theta^{T}x^{(i)} \right ) \right ) \frac{\partial }{\partial\theta_{j}}\theta^{T}x^{(i)} \end{align*}\)
\(\begin{align*} \frac{\partial }{\partial\theta_{j}}J(\theta) &= -\frac{1}{m}\sum_{m}^{i=1}\left ( y^{(i)}\left ( 1-g\left ( \theta^{T}x^{(i)} \right ) \right )-\left ( 1-y^{(i)} \right )g\left ( \theta^{T}x^{(i)}\right) \right )x_{j}^{\left (i \right )} \\ &= -\frac{1}{m}\sum_{m}^{i=1}\left ( y^{(i)} -g\left ( \theta^{T}x^{(i)}\right) \right )x_{j}^{\left (i \right )} \\ &=-\frac{1}{m}\sum_{m}^{i=1}\left ( y^{(i)} -h_{\theta}\left ( x^{(i)}\right) \right )x_{j}^{\left (i \right )} \\&=\frac{1}{m}\sum_{m}^{i=1}\left ( h_{\theta}\left ( x^{(i)}\right)-y^{(i)} \right )x_{j}^{\left (i \right )} \end{align*}\)
把偏导代入更新过程那么可以得到:
\(\theta_{j}:=\theta_{j}-\alpha\frac{1}{m}\sum_{m}^{i=1}\left ( h_{\theta}\left ( x^{(i)}\right)-y^{(i)} \right )x_{j}^{\left (i \right )}\)
学习步长\(\alpha\)通常是一个常量,然后省去\(\frac{1}{m}\),可以得到最终的更新过程:
\(\theta_{j}:=\theta_{j}-\alpha\sum_{m}^{i=1}\left ( h_{\theta}\left ( x^{(i)}\right)-y^{(i)} \right )x_{j}^{\left (i \right )}, \ \ \ \ \left ( j=0\cdots n \right )\)
向量化梯度
训练样本用矩阵来描述就是:
\(X= \begin{bmatrix} x^{(1)}\\ x^{(2)}\\ \cdots \\ x^{(m)}\end{bmatrix}=\begin{bmatrix} x_{0}^{(1)} & x_{1}^{(1)} & \cdots & x_{n}^{(1)}\\ x_{0}^{(2)} & x_{1}^{(2)} & \cdots & x_{n}^{(2)}\\ \cdots & \cdots & \cdots & \cdots \\ x_{0}^{(m)} & x_{1}^{(m)} & \cdots & x_{n}^{(m)} \end{bmatrix}, \ \ Y=\begin{bmatrix} y^{\left ( 1 \right )}\\ y^{\left ( 2 \right )}\\ \cdots \\ y^{\left ( m \right )}\end{bmatrix}\)
参数\(\theta\)的矩阵形式为:
\(\Theta=\begin{bmatrix} \theta^{\left ( 1 \right )}\\ \theta^{\left ( 2 \right )}\\ \cdots \\ \theta^{\left ( m \right )}\end{bmatrix}\)
先计算\(X\cdot \Theta\),并记结果为\(A\):
\(A=X\cdot\Theta\),其实就是矩阵的乘法
再来求取向量版的误差\(E\):
\(E=h_{\Theta}\left ( X \right )-Y=\begin{bmatrix} g\left ( A^{1} \right )-y^{\left (1 \right )}\\ g\left ( A^{1} \right )-y^{\left (1 \right )}\\ \cdots \\ g\left ( A^{1} \right )-y^{\left (1 \right )}\end{bmatrix} = \begin{bmatrix} e^{(1)}\\ e^{(2)}\\ \cdots \\ e^{(m)}\end{bmatrix}\)
当\(j=0\)时的更新过程为:
\(\begin{align*} \theta_{0}&=\theta_{0}-\alpha\sum_{m}^{i=1}\left ( h_{\theta}\left ( x^{(i)}\right)-y^{(i)} \right )x_{0}^{\left (i \right )}, \ \ \ \ \left ( j=0\cdots n \right ) \\ &= \theta_{0}-\alpha\sum_{m}^{i=1}e^{\left ( i \right )}x_{0}^{\left ( i \right )} \\ &= \theta_{0}-\alpha \begin{bmatrix} x_{0}^{\left ( 1 \right )} & x_{0}^{\left ( 2 \right )} & \cdots & x_{m}^{\left ( 0 \right )} \end{bmatrix} \cdot E \end{align*}\)
对于\(\theta_{j}\)同理可以得到:
\(\theta_{j} = \theta_{j}-\alpha \begin{bmatrix} x_{j}^{\left ( 1 \right )} & x_{j}^{\left ( 2 \right )} & \cdots & x_{j}^{\left ( m \right )} \end{bmatrix} \cdot E\)
用矩阵来表达就是:
\(\begin{align*}\begin{bmatrix} \theta_{0}\\ \theta_{1}\\ \cdots \\ \theta_{n}\end{bmatrix} &= \begin{bmatrix} \theta_{0}\\ \theta_{1}\\ \cdots \\ \theta_{n}\end{bmatrix} - \alpha \cdot \begin{bmatrix} x_{0}^{\left ( 1 \right )} & x_{0}^{\left ( 2 \right )} & \cdots & x_{0}^{\left (m \right )}\\ x_{1}^{\left ( 1 \right )} & x_{1}^{\left ( 2 \right )} & \cdots & x_{1}^{\left (m \right )}\\ \cdots & \cdots & \cdots & \cdots\\ x_{n}^{\left ( 1 \right )} & x_{n}^{\left ( 2 \right )} & \cdots & x_{n}^{\left (m \right )}\\ \end{bmatrix} \cdot E \\ &= \theta - \alpha \cdot x^{T} \cdot E \end{align*}\)
以上就三个步骤:
1. 求取模型的输出:\(A=X \cdot \Theta\)
2. sigmoid映射之后求误差:\(E=g\left ( A \right )-Y\)
3. 利用推导的公式更新\(\Theta\),\(\Theta:=\Theta-\alpha \cdot X^{T} \cdot E\),然后继续回到第一步继续。
logistic回归学习的更多相关文章
- 机器学习5—logistic回归学习笔记
机器学习实战之logistic回归 test5.py #-*- coding:utf-8 import sys sys.path.append("logRegres.py") fr ...
- 机器学习实战(Machine Learning in Action)学习笔记————05.Logistic回归
机器学习实战(Machine Learning in Action)学习笔记————05.Logistic回归 关键字:Logistic回归.python.源码解析.测试作者:米仓山下时间:2018- ...
- 《机器学习实战》学习笔记第五章 —— Logistic回归
一.有关笔记: 1..吴恩达机器学习笔记(二) —— Logistic回归 2.吴恩达机器学习笔记(十一) —— Large Scale Machine Learning 二.Python源码(不带正 ...
- 机器学习实战3:逻辑logistic回归+在线学习+病马实例
本文介绍logistic回归,和改进算法随机logistic回归,及一个病马是否可以治愈的案例.例子中涉及了数据清洗工作,缺失值的处理. 一 引言 1 sigmoid函数,这个非线性函数十分重要,f( ...
- SAS学习笔记29 logistic回归
变量筛选 当对多个自变量建立logistic回归模型时,并不是每一个自变量对模型都有贡献.通常我们希望所建立的模型将具有统计学意义的自变量都包含在内,而将没有统计学意义的自变量排除在外,即进行变量筛选 ...
- 吴恩达深度学习:2.12向量化logistic回归
1.不使用任何for循环用梯度下降实现整个训练集的一步迭代. (0)我们已经讨论过向量化如何显著加速代码,在这次视频中我们会设计向量化是如何实现logistic回归,这样酒桶同时处理m个训练集,来实现 ...
- 神经网络、logistic回归等分类算法简单实现
最近在github上看到一个很有趣的项目,通过文本训练可以让计算机写出特定风格的文章,有人就专门写了一个小项目生成汪峰风格的歌词.看完后有一些自己的小想法,也想做一个玩儿一玩儿.用到的原理是深度学习里 ...
- 如何在R语言中使用Logistic回归模型
在日常学习或工作中经常会使用线性回归模型对某一事物进行预测,例如预测房价.身高.GDP.学生成绩等,发现这些被预测的变量都属于连续型变量.然而有些情况下,被预测变量可能是二元变量,即成功或失败.流失或 ...
- Logistic回归分类算法原理分析与代码实现
前言 本文将介绍机器学习分类算法中的Logistic回归分类算法并给出伪代码,Python代码实现. (说明:从本文开始,将接触到最优化算法相关的学习.旨在将这些最优化的算法用于训练出一个非线性的函数 ...
随机推荐
- Oracle 12C -- 统一启动/关闭PDBs
SQL> select name,open_mode from v$pdbs; NAME OPEN_MODE ------------------------------ ---------- ...
- iOS Terminating app due to uncaught exception 'NSInternalInconsistencyException', reason: 'unable to
刚接触iOS,依照教程操作执行出现错误 Terminating app due to uncaught exception 'NSInternalInconsistencyException', re ...
- 如何给mysql用户分配权限
1,Mysql下创建新的用户 语法: 1.create user 用户名 identified by '密码'; 例:create user xiaogang identified by '12345 ...
- html5+php实现文件拖动上传功能
界面样式我是参考了一个国外的相册网站,改动不大,只是把鸟语转换成中文,以及上传时的样式也进行了改动,之所以选这个的原因就是,我很容易做扩展,它支持3种方式添加图片,一种拖拽上传,一种常规的选择文件上传 ...
- 温故而知新 前端日志上传新姿势 navigator.sendBeacon(信标)
原文地址:https://mp.weixin.qq.com/s/-moAfEZicrFmun4qfWLdOQ 简单示例js: var data = JSON.stringify({ name: 'Be ...
- eclipse 开发 spring 、 springboot项目调试时一直跳转到 SilentExitExceptionHandler.exitCurrentThread 方法
不想让 eclipse 调试时一直跳转到该方法 解决方法: Eclipse->[Preferences]->[Java]->[Debug]:去掉[Suspend execution ...
- Vue 动态组件、动画、插件
1 动态组件 ①简单来说: 就是几个组件放在一个挂载点下,然后根据父组件的某个变量来决定显示哪个,或者都不显示. ②动态切换: 在挂载点使用component标签,然后使用v-bind:is=”组件名 ...
- HDU 1019 Least Common Multiple 数学题解
求一组数据的最小公倍数. 先求公约数在求公倍数.利用公倍数,连续求全部数的公倍数就能够了. #include <stdio.h> int GCD(int a, int b) { retur ...
- Eclipse Axis2 插件将代码生成WSDL指南
Eclipse Axis2 插件将代码生成WSDL指南 快速学习手册 开发工具:https://spring.io/tools 插件地址:http://axis.apache.org/axis2/ja ...
- Atitit spring 3.0 3.1 3.2 4.0 4.3 5.0 新特性
Atitit spring 3.0 3.1 3.2 4.0 4.3 5.0 新特性 Spring3.0的新特性及其分析 - 我的人生不甘于平庸! - ITeye技术网站.html Spring3.0带 ...