Jacobi并行拆解【补充】
作者:桂。
时间:2018-04-24 22:04:52
链接:http://www.cnblogs.com/xingshansi/p/8934373.html
前言
本文为Jacobi并行拆解一文的补充,给出另一种矩阵运算的思路。
一、算法流程
对于复数相关矩阵R,通过矩阵变换,在维度不变的情况下,转化为实数矩阵:

对于MUSIC算法,该思路可以降低Jacobi运算复杂度。额外的操作仅仅是少量的乘法操作,即耗费少量硬件资源换取更快速的处理时间。
直接复数转实数,需要将nxn的矩阵扩展为2n x 2n的矩阵,而直接转化的相关矩阵仍然为 n x n,降低了Jacobi的复杂度。
容易证明U*Un为新的特征向量,而U可与导向矢量a提前乘法处理,存储到Ram里。
这里可以看出:(R + J*conj(R)*J)/2等价于中心对称线阵的前、后项空间平滑算法,而斜Hermitian矩阵的特征向量与转化的特征向量等价,因此可以得出特性:对于具备中心对称特性的线阵,复数->实数,既可以降低Jacobi复杂度,又具备了解相干信号的能力。
二、仿真验证
未做实数化处理,code:
clc;clear all;close all
%Ref:Narrowband direction of arrival estimation for antenna arrays
doas=[-30 -5 40]*pi/180; %DOA's of signals in rad.
P=[1 1 1]; %Power of incoming signals
N=10; %Number of array elements
K=1024; %Number of data snapshots
d=0.5; %Distance between elements in wavelengths
noise_var=1; %Variance of noise
r=length(doas); %Total number of signals
% Steering vector matrix. Columns will contain the steering vectors
% of the r signals
A=exp(-i*2*pi*d*(0:N-1)'*sin([doas(:).']));
% Signal and noise generation
sig=round(rand(r,K))*2-1; % Generate random BPSK symbols for each of the
% r signals
noise=sqrt(noise_var/2)*(randn(N,K)+i*randn(N,K)); %Uncorrelated noise
X=A*diag(sqrt(P))*sig+noise; %Generate data matrix
R=X*X'/K; %Spatial covariance matrix
[Q ,D]= svd(R); %Compute eigendecomposition of covariance matrix
[D,I]=sort(diag(D),1,'descend'); %Find r largest eigenvalues
Q=Q(:,I);%Sort?the?eigenvectors?to?put?signal?eigenvectors?first
Qs=Q (:,1:r); %Get the signal eigenvectors
Qn=Q(:,r+1:N); %Get the noise eigenvectors
% MUSIC algorithm
%?Define?angles?at?which?MUSIC???spectrum????will?be?computed
angles=(-90:0.1:90);
%Compute steering vectors corresponding values in angles
a1=exp(-i*2*pi*d*(0:N-1)'*sin([angles(:).']*pi/180));
for k=1:length(angles)%Compute?MUSIC???spectrum??
music_spectrum(k)= 1/(a1(:,k)'*Qn*Qn'*a1(:,k));
end
figure(1)
plot(angles,abs(music_spectrum))
title('MUSIC Spectrum')
xlabel('Angle in degrees')
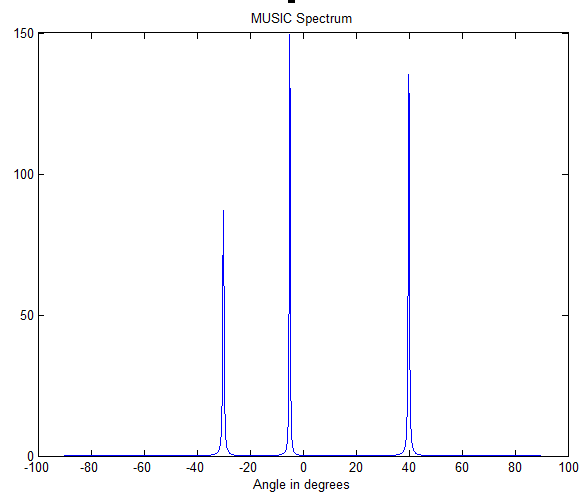
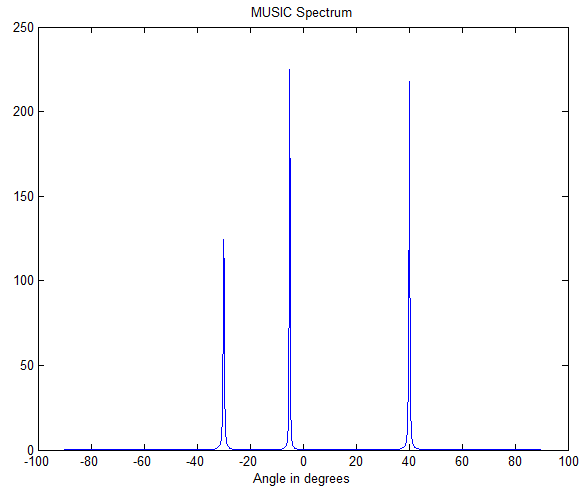
实数化处理,code:
clc;clear all;close all
%Ref:Narrowband direction of arrival estimation for antenna arrays
doas=[-30 -5 40]*pi/180; %DOA's of signals in rad.
P=[1 1 1]; %Power of incoming signals
N=10; %Number of array elements
K=1024; %Number of data snapshots
d=0.5; %Distance between elements in wavelengths
noise_var=1; %Variance of noise
r=length(doas); %Total number of signals
% Steering vector matrix. Columns will contain the steering vectors
% of the r signals
A=exp(-i*2*pi*d*(0:N-1)'*sin([doas(:).']));
% Signal and noise generation
sig=round(rand(r,K))*2-1; % Generate random BPSK symbols for each of the
% r signals
noise=sqrt(noise_var/2)*(randn(N,K)+i*randn(N,K)); %Uncorrelated noise
X=A*diag(sqrt(P))*sig+noise; %Generate data matrix
R=X*X'/K; %Spatial covariance matrix
%% Reconstruct
%实数
n = size(R);
I = eye(n/2);
J = fliplr(eye(n));
U = 1/sqrt(2)*[I fliplr(I);1j*fliplr(I) -1j*I];
R = 0.5*U*(R+J*conj(R)*J)*U';
% Reconstruct_end
[Q ,D]= svd(R); %Compute eigendecomposition of covariance matrix
[D,I]=sort(diag(D),1,'descend'); %Find r largest eigenvalues
Q=Q(:,I);%Sort?the?eigenvectors?to?put?signal?eigenvectors?first
Qs=Q (:,1:r); %Get the signal eigenvectors
Qn=Q(:,r+1:N); %Get the noise eigenvectors
% MUSIC algorithm
%?Define?angles?at?which?MUSIC???spectrum????will?be?computed
angles=(-90:0.1:90);
%Compute steering vectors corresponding values in angles
a1=exp(-i*2*pi*d*(0:N-1)'*sin([angles(:).']*pi/180));
for k=1:length(angles)%Compute?MUSIC???spectrum??
music_spectrum(k)= 1/(a1(:,k)'*U'*Qn*Qn'*U*a1(:,k));
end
figure(1)
plot(angles,abs(music_spectrum))
title('MUSIC Spectrum')
xlabel('Angle in degrees')
Jacobi并行拆解【补充】的更多相关文章
- Jacobi并行拆解
作者:桂. 时间:2018-04-23 21:12:02 链接:http://www.cnblogs.com/xingshansi/p/8921815.html 前言 本文主要是复数矩阵分解的拆解思 ...
- 进程队列补充、socket实现服务器并发、线程完结
目录 1.队列补充 2.关于python并发与并行的补充 3.TCP服务端实现并发 4.GIL全局解释器锁 什么是保证线程安全呢? GIL与Lock 5.验证多线程的作用 对结论的验证: 6.死锁现象 ...
- 深入理解Java虚拟机之JVM垃圾回收随笔
1.对象已经死亡? 1.1引用计数法:给对象中添加一个引用计数器,每当有一个地方引用他时,计数器值就加1:当引用失效时,计数器值就减1:任何时刻计数器都为0的对象就是不可能再被使用 的.但是它很难解决 ...
- 《OpenCL异构并行编程实战》补充笔记散点,第一至四章
▶ 总体印象:适合 OpenCL 入门的书,有丰富的代码和说明,例子较为简单.先把 OpenCL 代码的基本结构(平台 → 设备 → 上下文 → 命令队列 → 创建缓冲区 → 读写缓冲区 → 编译代码 ...
- Python基础补充(二) 多核CPU上python多线程并行的一个假象【转】
在python上开启多个线程,由于GIL的存在,每个单独线程都会在竞争到GIL后才运行,这样就干预OS内部的进程(线程)调度,结果在多核CPU上: python的多线程实际是串行执行的,并不会同一时间 ...
- 《OpenCL异构并行编程实战》补充笔记散点,第五至十二章
▶ 第五章,OpenCL 的并发与执行模型 ● 内存对象与上下文相关而不是与设备相关.设备在不同设备之间的移动如下,如果 kernel 在第二个设备上运行,那么在第一个设备上产生的任何数据结果在第二个 ...
- OpenMP 《并行程序设计导论》的补充代码
▶ 使用 OpenMP 和队列数据结构,在各线程之间传递信息 ● 代码,使用 critical 子句和 atomic 指令来进行读写保护 // queue.h #ifndef _QUEUE_H_ #d ...
- Pthreads 《并行程序设计导论》的补充代码
▶ 关于单链表的访问,插入结点和删除结点操作,并且将其推广到多线程中去. ● 代码,通用的随机数生成 // my_rand.h #ifndef _MY_RAND_H_ #define _MY_RAND ...
- .Net并行编程(一)-TPL之数据并行
前言 许多个人计算机和工作站都有多个CPU核心,可以同时执行多个线程.利用硬件的特性,使用并行化代码以在多个处理器之间分配工作. 应用场景 文件批量上传 并行上传单个文件.也可以把一个文件拆成几段分开 ...
随机推荐
- Python学习笔记八:ORM框架SQLAlchemy
一:SQLAlchemy使用 1:实体类的创建 ORM中的实体类与一般的Python类不同,在其中,使用 __tablename__=""指明该类与数据库中某个表相对应,然后定义一 ...
- VIM设置代码折叠
今天看了一下别人写的程序的源代码,发现是用vim写的,代码中有趣是用vim来折叠代码,一开始我以为是用插件的,后来上网查了查,得出以下使用方面的技巧. 1. 折叠方式 可用选项来设定折叠方式: 可在V ...
- 〖Android〗Nexus 7 flo (razor) 刷入Recovery/CM-11.0后卡在开机动画的解决方法
操作日志: 起因:Nexus 7 flo 华硕平板,刷了一个CWM Recovery之后变成了砖机: 尝试1:使用CWM Recovery清除数据,开机失败 尝试2:刷入CM 11 Snapshot的 ...
- Kinect2.0骨骼跟踪与数据平滑
Kinect v1和Kinect v2传感器的配置比较: Kinect v1 Kinect v2 颜色(Color) 分辨率(Resolution) 640×480 1920× ...
- 错误提示:通过 Web 服务器的身份验证的用户无权打开文件系统上的文件
//win7中iis配置好了可是网页打不开,为什么.? //错误提示:通过 Web 服务器的身份验证的用户无权打开文件系统上的文件 //解决办法1.右键单击你的网站根目录文件夹,如wwwroot文件夹 ...
- excel合并同类项去重求和功能
参考:百度经验 主要利用函数为:sumif(range,criteria,[sum_range]) Range:条件区域,用于条件判断的单元格区域. Criteria:求和条件,由数字.逻辑表达式等组 ...
- ios中封装网络和tableview的综合运用
1:封装网络请求 类 #import <Foundation/Foundation.h> #import "ASIFormDataRequest.h" #import ...
- [SQL Server]从 varchar 数据类型到 datetime 数据类型的转换产生一个超出范围的值。
见下图sql, 使用dateadd()转换时报如题错误, 原因是数据库表中存入的数据格式不正确, 数据格式不正确, 数据格式不正确, 重要的事情讲3遍!! ca.batch_no的前8位必须是日 ...
- numpy中的argpartition
numpy.argpartition(a, kth, axis=-1, kind='introselect', order=None) 在快排算法中,有一个典型的操作:partition.这个操作指: ...
- 使用jupyterthemes插件定制jupyter notebook界面
jupyter notebook界面是可以定制的,定制位置在:C:\anaconda\Lib\site-packages\notebook\static\custom. 启动jupyter noteb ...