linux进程地址空间--vma的基本操作【转】
转自:http://blog.csdn.net/vanbreaker/article/details/7855007
版权声明:本文为博主原创文章,未经博主允许不得转载。
在32位的系统上,线性地址空间可达到4GB,这4GB一般按照3:1的比例进行分配,也就是说用户进程享有前3GB线性地址空间,而内核独享最后1GB线性地址空间。由于虚拟内存的引入,每个进程都可拥有3GB的虚拟内存,并且用户进程之间的地址空间是互不可见、互不影响的,也就是说即使两个进程对同一个地址进行操作,也不会产生问题。在前面介绍的一些分配内存的途径中,无论是伙伴系统中分配页的函数,还是slab分配器中分配对象的函数,它们都会尽量快速地响应内核的分配请求,将相应的内存提交给内核使用,而内核对待用户空间显然不能如此。用户空间动态申请内存时往往只是获得一块线性地址的使用权,而并没有将这块线性地址区域与实际的物理内存对应上,只有当用户空间真正操作申请的内存时,才会触发一次缺页异常,这时内核才会分配实际的物理内存给用户空间。
用户进程的虚拟地址空间包含了若干区域,这些区域的分布方式是特定于体系结构的,不过所有的方式都包含下列成分:
- 可执行文件的二进制代码,也就是程序的代码段
- 存储全局变量的数据段
- 用于保存局部变量和实现函数调用的栈
- 环境变量和命令行参数
- 程序使用的动态库的代码
- 用于映射文件内容的区域
由此可以看到进程的虚拟内存空间会被分成不同的若干区域,每个区域都有其相关的属性和用途,一个合法的地址总是落在某个区域当中的,这些区域也不会重叠。在linux内核中,这样的区域被称之为虚拟内存区域(virtual memory areas),简称vma。一个vma就是一块连续的线性地址空间的抽象,它拥有自身的权限(可读,可写,可执行等等) ,每一个虚拟内存区域都由一个相关的struct vm_area_struct结构来描述
- <span style="font-size:12px;">struct vm_area_struct {
- struct mm_struct * vm_mm; /* 所属的内存描述符 */
- unsigned long vm_start; /* vma的起始地址 */
- unsigned long vm_end; /* vma的结束地址 */
- /* 该vma的在一个进程的vma链表中的前驱vma和后驱vma指针,链表中的vma都是按地址来排序的*/
- struct vm_area_struct *vm_next, *vm_prev;
- pgprot_t vm_page_prot; /* vma的访问权限 */
- unsigned long vm_flags; /* 标识集 */
- struct rb_node vm_rb; /* 红黑树中对应的节点 */
- /*
- * For areas with an address space and backing store,
- * linkage into the address_space->i_mmap prio tree, or
- * linkage to the list of like vmas hanging off its node, or
- * linkage of vma in the address_space->i_mmap_nonlinear list.
- */
- /* shared联合体用于和address space关联 */
- union {
- struct {
- struct list_head list;/* 用于链入非线性映射的链表 */
- void *parent; /* aligns with prio_tree_node parent */
- struct vm_area_struct *head;
- } vm_set;
- struct raw_prio_tree_node prio_tree_node;/*线性映射则链入i_mmap优先树*/
- } shared;
- /*
- * A file's MAP_PRIVATE vma can be in both i_mmap tree and anon_vma
- * list, after a COW of one of the file pages. A MAP_SHARED vma
- * can only be in the i_mmap tree. An anonymous MAP_PRIVATE, stack
- * or brk vma (with NULL file) can only be in an anon_vma list.
- */
- /*anno_vma_node和annon_vma用于管理源自匿名映射的共享页*/
- struct list_head anon_vma_node; /* Serialized by anon_vma->lock */
- struct anon_vma *anon_vma; /* Serialized by page_table_lock */
- /* Function pointers to deal with this struct. */
- /*该vma上的各种标准操作函数指针集*/
- const struct vm_operations_struct *vm_ops;
- /* Information about our backing store: */
- unsigned long vm_pgoff; /* 映射文件的偏移量,以PAGE_SIZE为单位 */
- struct file * vm_file; /* 映射的文件,没有则为NULL */
- void * vm_private_data; /* was vm_pte (shared mem) */
- unsigned long vm_truncate_count;/* truncate_count or restart_addr */
- #ifndef CONFIG_MMU
- struct vm_region *vm_region; /* NOMMU mapping region */
- #endif
- #ifdef CONFIG_NUMA
- struct mempolicy *vm_policy; /* NUMA policy for the VMA */
- #endif
- };
- </span>
进程的若干个vma区域都得按一定的形式组织在一起,这些vma都包含在进程的内存描述符中,也就是struct mm_struct中,这些vma在mm_struct以两种方式进行组织,一种是链表方式,对应于mm_struct中的mmap链表头,一种是红黑树方式,对应于mm_struct中的mm_rb根节点,和内核其他地方一样,链表用于遍历,红黑树用于查找。
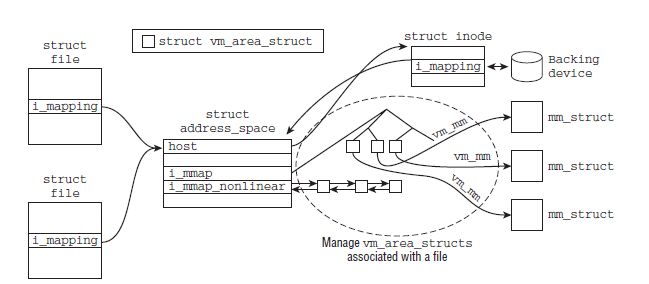
下面以文件映射为例,来阐述文件的address_space和与其建立映射关系的vma是如何联系上的。首先来看看struct address_space中与vma相关的变量
- struct address_space {
- struct inode *host; /* owner: inode, block_device */
- ...
- struct prio_tree_root i_mmap; /* tree of private and shared mappings */
- struct list_head i_mmap_nonlinear; /*list VM_NONLINEAR mappings */
- ...
- } __attr
与此同时,struct file和struct inode中都包含有一个struct address_space的指针,分别为f_mapping和i_mapping。struct file是一个特定于进程的数据结构,而struct inode则是一个特定于文件的数据结构。每当进程打开一个文件时,都会将file->f_mapping设置到inode->i_mapping,下图则给出了文件和与其建立映射关系的vma的联系
下面来看几个vma的基本操作函数,这些函数都是后面实现具体功能的基础
find_vma()用来寻找一个针对于指定地址的vma,该vma要么包含了指定的地址,要么位于该地址之后并且离该地址最近,或者说寻找第一个满足addr<vma_end的vma
- struct vm_area_struct *find_vma(struct mm_struct *mm, unsigned long addr)
- {
- struct vm_area_struct *vma = NULL;
- if (mm) {
- /* Check the cache first. */
- /* (Cache hit rate is typically around 35%.) */
- vma = mm->mmap_cache; //首先尝试mmap_cache中缓存的vma
- /*如果不满足下列条件中的任意一个则从红黑树中查找合适的vma
- 1.缓存vma不存在
- 2.缓存vma的结束地址小于给定的地址
- 3.缓存vma的起始地址大于给定的地址*/
- if (!(vma && vma->vm_end > addr && vma->vm_start <= addr)) {
- struct rb_node * rb_node;
- rb_node = mm->mm_rb.rb_node;//获取红黑树根节点
- vma = NULL;
- while (rb_node) {
- struct vm_area_struct * vma_tmp;
- vma_tmp = rb_entry(rb_node, //获取节点对应的vma
- struct vm_area_struct, vm_rb);
- /*首先确定vma的结束地址是否大于给定地址,如果是的话,再确定
- vma的起始地址是否小于给定地址,也就是优先保证给定的地址是
- 处于vma的范围之内的,如果无法保证这点,则只能找到一个距离
- 给定地址最近的vma并且该vma的结束地址要大于给定地址*/
- if (vma_tmp->vm_end > addr) {
- vma = vma_tmp;
- if (vma_tmp->vm_start <= addr)
- break;
- rb_node = rb_node->rb_left;
- } else
- rb_node = rb_node->rb_right;
- }
- if (vma)
- mm->mmap_cache = vma;//将结果保存在缓存中
- }
- }
- return vma;
- }
当一个新区域被加到进程的地址空间时,内核会检查它是否可以与一个或多个现存区域合并,vma_merge()函数在可能的情况下,将一个新区域与周边区域进行合并。参数:
mm:新区域所属的进程地址空间
prev:在地址上紧接着新区域的前面一个vma
addr:新区域的起始地址
end:新区域的结束地址
vm_flags:新区域的标识集
anon_vma:新区域所属的匿名映射
file:新区域映射的文件
pgoff:新区域映射文件的偏移
policy:和NUMA相关
- struct vm_area_struct *vma_merge(struct mm_struct *mm,
- struct vm_area_struct *prev, unsigned long addr,
- unsigned long end, unsigned long vm_flags,
- struct anon_vma *anon_vma, struct file *file,
- pgoff_t pgoff, struct mempolicy *policy)
- {
- pgoff_t pglen = (end - addr) >> PAGE_SHIFT;
- struct vm_area_struct *area, *next;
- /*
- * We later require that vma->vm_flags == vm_flags,
- * so this tests vma->vm_flags & VM_SPECIAL, too.
- */
- if (vm_flags & VM_SPECIAL)
- return NULL;
- if (prev)//指定了先驱vma,则获取先驱vma的后驱vma
- next = prev->vm_next;
- else //否则指定mm的vma链表中的第一个元素为后驱vma
- next = mm->mmap;
- area = next;
- /*后驱节点存在,并且后驱vma的结束地址和给定区域的结束地址相同,
- 也就是说两者有重叠,那么调整后驱vma*/
- if (next && next->vm_end == end) /* cases 6, 7, 8 */
- next = next->vm_next;
- /*
- * 先判断给定的区域能否和前驱vma进行合并,需要判断如下的几个方面:
- 1.前驱vma必须存在
- 2.前驱vma的结束地址正好等于给定区域的起始地址
- 3.两者的struct mempolicy中的相关属性要相同,这项检查只对NUMA架构有意义
- 4.其他相关项必须匹配,包括两者的vm_flags,是否映射同一个文件等等
- */
- if (prev && prev->vm_end == addr &&
- mpol_equal(vma_policy(prev), policy) &&
- can_vma_merge_after(prev, vm_flags,
- anon_vma, file, pgoff)) {
- /*
- *确定可以和前驱vma合并后再判断是否能和后驱vma合并,判断方式和前面一样,
- 不过这里多了一项检查,在给定区域能和前驱、后驱vma合并的情况下还要检查
- 前驱、后驱vma的匿名映射可以合并
- */
- if (next && end == next->vm_start &&
- mpol_equal(policy, vma_policy(next)) &&
- can_vma_merge_before(next, vm_flags,
- anon_vma, file, pgoff+pglen) &&
- is_mergeable_anon_vma(prev->anon_vma,
- next->anon_vma)) {
- /* cases 1, 6 */
- vma_adjust(prev, prev->vm_start,
- next->vm_end, prev->vm_pgoff, NULL);
- } else /* cases 2, 5, 7 */
- vma_adjust(prev, prev->vm_start,
- end, prev->vm_pgoff, NULL);
- return prev;
- }
- /*
- * Can this new request be merged in front of next?
- */
- /*如果前面的步骤失败,那么则从后驱vma开始进行和上面类似的步骤*/
- if (next && end == next->vm_start &&
- mpol_equal(policy, vma_policy(next)) &&
- can_vma_merge_before(next, vm_flags,
- anon_vma, file, pgoff+pglen)) {
- if (prev && addr < prev->vm_end) /* case 4 */
- vma_adjust(prev, prev->vm_start,
- addr, prev->vm_pgoff, NULL);
- else /* cases 3, 8 */
- vma_adjust(area, addr, next->vm_end,
- next->vm_pgoff - pglen, NULL);
- return area;
- }
- return NULL;
- }
vma_adjust会执行具体的合并调整操作
- void vma_adjust(struct vm_area_struct *vma, unsigned long start,
- unsigned long end, pgoff_t pgoff, struct vm_area_struct *insert)
- {
- struct mm_struct *mm = vma->vm_mm;
- struct vm_area_struct *next = vma->vm_next;
- struct vm_area_struct *importer = NULL;
- struct address_space *mapping = NULL;
- struct prio_tree_root *root = NULL;
- struct file *file = vma->vm_file;
- struct anon_vma *anon_vma = NULL;
- long adjust_next = 0;
- int remove_next = 0;
- if (next && !insert) {
- /*指定的范围已经跨越了整个后驱vma,并且有可能超过后驱vma*/
- if (end >= next->vm_end) {
- /*
- * vma expands, overlapping all the next, and
- * perhaps the one after too (mprotect case 6).
- */
- again: remove_next = 1 + (end > next->vm_end);//确定是否超过了后驱vma
- end = next->vm_end;
- anon_vma = next->anon_vma;
- importer = vma;
- } else if (end > next->vm_start) {/*指定的区域和后驱vma部分重合*/
- /*
- * vma expands, overlapping part of the next:
- * mprotect case 5 shifting the boundary up.
- */
- adjust_next = (end - next->vm_start) >> PAGE_SHIFT;
- anon_vma = next->anon_vma;
- importer = vma;
- } else if (end < vma->vm_end) {/*指定的区域没到达后驱vma的结束处*/
- /*
- * vma shrinks, and !insert tells it's not
- * split_vma inserting another: so it must be
- * mprotect case 4 shifting the boundary down.
- */
- adjust_next = - ((vma->vm_end - end) >> PAGE_SHIFT);
- anon_vma = next->anon_vma;
- importer = next;
- }
- }
- if (file) {//如果有映射文件
- mapping = file->f_mapping;//获取文件对应的address_space
- if (!(vma->vm_flags & VM_NONLINEAR))
- root = &mapping->i_mmap;
- spin_lock(&mapping->i_mmap_lock);
- if (importer &&
- vma->vm_truncate_count != next->vm_truncate_count) {
- /*
- * unmap_mapping_range might be in progress:
- * ensure that the expanding vma is rescanned.
- */
- importer->vm_truncate_count = 0;
- }
- /*如果指定了待插入的vma,则根据vma是否以非线性的方式映射文件来选择是将
- vma插入file对应的address_space的优先树(对应线性映射)还是双向链表(非线性映射)*/
- if (insert) {
- insert->vm_truncate_count = vma->vm_truncate_count;
- /*
- * Put into prio_tree now, so instantiated pages
- * are visible to arm/parisc __flush_dcache_page
- * throughout; but we cannot insert into address
- * space until vma start or end is updated.
- */
- __vma_link_file(insert);
- }
- }
- /*
- * When changing only vma->vm_end, we don't really need
- * anon_vma lock.
- */
- if (vma->anon_vma && (insert || importer || start != vma->vm_start))
- anon_vma = vma->anon_vma;
- if (anon_vma) {
- spin_lock(&anon_vma->lock);
- /*
- * Easily overlooked: when mprotect shifts the boundary,
- * make sure the expanding vma has anon_vma set if the
- * shrinking vma had, to cover any anon pages imported.
- */
- if (importer && !importer->anon_vma) {
- importer->anon_vma = anon_vma;
- __anon_vma_link(importer);//将importer插入importer的anon_vma匿名映射链表中
- }
- }
- if (root) {
- flush_dcache_mmap_lock(mapping);
- vma_prio_tree_remove(vma, root);
- if (adjust_next)
- vma_prio_tree_remove(next, root);
- }
- /*调整vma的相关量*/
- vma->vm_start = start;
- vma->vm_end = end;
- vma->vm_pgoff = pgoff;
- if (adjust_next) {//调整后驱vma的相关量
- next->vm_start += adjust_next << PAGE_SHIFT;
- next->vm_pgoff += adjust_next;
- }
- if (root) {
- if (adjust_next)//如果后驱vma被调整了,则重新插入到优先树中
- vma_prio_tree_insert(next, root);
- vma_prio_tree_insert(vma, root);//将vma插入到优先树中
- flush_dcache_mmap_unlock(mapping);
- }
- if (remove_next) {//给定区域与后驱vma有重合
- /*
- * vma_merge has merged next into vma, and needs
- * us to remove next before dropping the locks.
- */
- __vma_unlink(mm, next, vma);//将后驱vma从红黑树中删除
- if (file)//将后驱vma从文件对应的address space中删除
- __remove_shared_vm_struct(next, file, mapping);
- if (next->anon_vma)//将后驱vma从匿名映射链表中删除
- __anon_vma_merge(vma, next);
- } else if (insert) {
- /*
- * split_vma has split insert from vma, and needs
- * us to insert it before dropping the locks
- * (it may either follow vma or precede it).
- */
- __insert_vm_struct(mm, insert);//将待插入的vma插入mm的红黑树,双向链表以及
- //匿名映射链表
- }
- if (anon_vma)
- spin_unlock(&anon_vma->lock);
- if (mapping)
- spin_unlock(&mapping->i_mmap_lock);
- if (remove_next) {
- if (file) {
- fput(file);
- if (next->vm_flags & VM_EXECUTABLE)
- removed_exe_file_vma(mm);
- }
- mm->map_count--;
- mpol_put(vma_policy(next));
- kmem_cache_free(vm_area_cachep, next);
- /*
- * In mprotect's case 6 (see comments on vma_merge),
- * we must remove another next too. It would clutter
- * up the code too much to do both in one go.
- */
- if (remove_next == 2) {//还有待删除的区域
- next = vma->vm_next;
- goto again;
- }
- }
- validate_mm(mm);
- }
insert_vm_struct()函数用于插入一块新区域
- int insert_vm_struct(struct mm_struct * mm, struct vm_area_struct * vma)
- {
- struct vm_area_struct * __vma, * prev;
- struct rb_node ** rb_link, * rb_parent;
- /*
- * The vm_pgoff of a purely anonymous vma should be irrelevant
- * until its first write fault, when page's anon_vma and index
- * are set. But now set the vm_pgoff it will almost certainly
- * end up with (unless mremap moves it elsewhere before that
- * first wfault), so /proc/pid/maps tells a consistent story.
- *
- * By setting it to reflect the virtual start address of the
- * vma, merges and splits can happen in a seamless way, just
- * using the existing file pgoff checks and manipulations.
- * Similarly in do_mmap_pgoff and in do_brk.
- */
- if (!vma->vm_file) {
- BUG_ON(vma->anon_vma);
- vma->vm_pgoff = vma->vm_start >> PAGE_SHIFT;
- }
- /*__vma用来保存和vma->start对应的vma(与find_vma()一样),同时获取以下信息:
- 1.prev用来保存对应的前驱vma
- 2.rb_link保存该vma区域插入对应的红黑树节点
- 3.rb_parent保存该vma区域对应的父节点*/
- __vma = find_vma_prepare(mm,vma->vm_start,&prev,&rb_link,&rb_parent);
- if (__vma && __vma->vm_start < vma->vm_end)
- return -ENOMEM;
- if ((vma->vm_flags & VM_ACCOUNT) &&
- security_vm_enough_memory_mm(mm, vma_pages(vma)))
- return -ENOMEM;
- vma_link(mm, vma, prev, rb_link, rb_parent);//将vma关联到所有的数据结构中
- return 0;
- }
- static void vma_link(struct mm_struct *mm, struct vm_area_struct *vma,
- struct vm_area_struct *prev, struct rb_node **rb_link,
- struct rb_node *rb_parent)
- {
- struct address_space *mapping = NULL;
- if (vma->vm_file)//如果存在文件映射则获取文件对应的地址空间
- mapping = vma->vm_file->f_mapping;
- if (mapping) {
- spin_lock(&mapping->i_mmap_lock);
- vma->vm_truncate_count = mapping->truncate_count;
- }
- anon_vma_lock(vma);
- /*将vma插入到相应的数据结构中--双向链表,红黑树和匿名映射链表*/
- __vma_link(mm, vma, prev, rb_link, rb_parent);
- __vma_link_file(vma);//将vma插入到文件地址空间的相应数据结构中
- anon_vma_unlock(vma);
- if (mapping)
- spin_unlock(&mapping->i_mmap_lock);
- mm->map_count++;
- validate_mm(mm);
- }
在创建新的vma区域之前先要寻找一块足够大小的空闲区域,该项工作由get_unmapped_area()函数完成,而实际的工作将会由mm_struct中定义的辅助函数来完成。根据进程虚拟地址空间的布局,会选择使用不同的映射函数,在这里考虑大多数系统上采用的标准函数arch_get_unmapped_area();
- unsigned long
- arch_get_unmapped_area(struct file *filp, unsigned long addr,
- unsigned long len, unsigned long pgoff, unsigned long flags)
- {
- struct mm_struct *mm = current->mm;
- struct vm_area_struct *vma;
- unsigned long start_addr;
- if (len > TASK_SIZE)
- return -ENOMEM;
- if (flags & MAP_FIXED)
- return addr;
- if (addr) {
- addr = PAGE_ALIGN(addr);//将地址按页对齐
- vma = find_vma(mm, addr);//获取一个vma,该vma可能包含了addr也可能在addr后面并且离addr最近
- /*这里确定是否有一块适合的空闲区域,先要保证addr+len不会
- 超过进程地址空间的最大允许范围,然后如果前面vma获取成功的话则要保证
- vma位于addr的后面并且addr+len不会延伸到该vma的区域*/
- if (TASK_SIZE - len >= addr &&
- (!vma || addr + len <= vma->vm_start))
- return addr;
- }
- /*前面获取不成功的话则要调整起始地址了,根据情况选择缓存的空闲区域地址
- 或者TASK_UNMAPPED_BASE=TASK_SIZE/3*/
- if (len > mm->cached_hole_size) {
- start_addr = addr = mm->free_area_cache;
- } else {
- start_addr = addr = TASK_UNMAPPED_BASE;
- mm->cached_hole_size = 0;
- }
- full_search:
- /*从addr开始遍历用户地址空间*/
- for (vma = find_vma(mm, addr); ; vma = vma->vm_next) {
- /* At this point: (!vma || addr < vma->vm_end). */
- if (TASK_SIZE - len < addr) {//这里判断是否已经遍历到了用户地址空间的末端
- /*
- * Start a new search - just in case we missed
- * some holes.
- */
- //如果上次不是从TAKS_UNMAPPED_BASE开始遍历的,则尝试从TASK_UNMAPPED_BASE开始遍历
- if (start_addr != TASK_UNMAPPED_BASE) {
- addr = TASK_UNMAPPED_BASE;
- start_addr = addr;
- mm->cached_hole_size = 0;
- goto full_search;
- }
- return -ENOMEM;
- }
- if (!vma || addr + len <= vma->vm_start) {//判断是否有空闲区域
- /*
- *找到空闲区域的话则记住我们搜索的结束处,以便下次搜索
- */
- mm->free_area_cache = addr + len;
- return addr;
- }
- /*该空闲区域不符合大小要求,但是如果这个空闲区域大于之前保存的最大值的话
- 则将这个空闲区域保存,这样便于前面确定从哪里开始搜索*/
- if (addr + mm->cached_hole_size < vma->vm_start)
- mm->cached_hole_size = vma->vm_start - addr;
- addr = vma->vm_end;
- }
- }
linux进程地址空间--vma的基本操作【转】的更多相关文章
- linux进程地址空间详解(转载)
linux进程地址空间详解(转载) 在前面的<对一个程序在内存中的分析 >中很好的描述了程序在内存中的布局,这里对这个结果做些总结和实验验证.下面以Linux为例(实验结果显示window ...
- UNIX环境高级编程——Linux进程地址空间和虚拟内存
一.虚拟内存 分段机制:即分成代码段,数据段,堆栈段.每个内存段都与一个特权级相关联,即0~3,0具有最高特权级(内核),3则是最低特权级(用户),每当程序试图访问(权限又分为可读.可写和可执行)一个 ...
- Linux进程地址空间和虚拟内存
一.虚拟内存 先来看一张图(来自<Linux内核完全剖析>),如下: 分段机制:即分成代码段,数据段,堆栈段.每个内存段都与一个特权级相关联,即0~3,0具有最高特权级(内核),3则是最低 ...
- linux 进程地址空间的一步步探究
我们知道,在32位机器上linux操作系统中的进程的地址空间大小是4G,其中0-3G是用户空间,3G-4G是内核空间.其实,这个4G的地址空间是不存在的,也就是我们所说的虚拟内存空间. 那虚拟内存空间 ...
- Linux进程地址空间与虚拟内存
http://blog.csdn.net/xu3737284/article/details/12710217 32位机器上linux操作系统中的进程的地址空间大小是4G,其中0-3G是用户空间,3G ...
- Linux进程地址空间 && 进程内存布局[转]
一 进程空间分布概述 对于一个进程,其空间分布如下图所示: 程序段(Text):程序代码在内存中的映射,存放函数体的二进制代码. 初始化过的数据(Data):在程序运行初已经对变量进行初始 ...
- Linux 进程地址空间及原理
1.程序地址空间 首先,我们先看学c/c++时候学到的程序内存布局: 准确地说,程序地址空间其实就是进程的地址空间,实际就是pcb中的mm_struct. 接下来,我们用fork()演示一下 ...
- Linux进程虚拟地址空间管理2
2017-04-12 前篇文章对Linux进程地址空间的布局以及各个部分的功能做了简要介绍,本文主要对各个部分的具体使用做下简要分析,主要涉及三个方面:1.MMAP文件的映射过程 2.用户 内存的动态 ...
- linux 进程(一)---基本概念
一.进程的定义 进程是操作系统的概念,每当我们执行一个程序时,对于操作系统来讲就创建了一个进程,在这个过程中,伴随着资源的分配和释放.可以认为进程是一个程序的一次执行过程. 二.进 ...
随机推荐
- [Codeforces976E]Well played!(贪心)
[不稳定的传送门] Solution 首先可以证明,hp翻倍的操作一定是在同一个生物上最优 Code #include <cstdio> #include <algorithm> ...
- BZOJ 5004: 开锁魔法II
比较显然 #include<cstdio> #include<algorithm> #include<cstring> using namespace std; i ...
- sql server inser相关处理(添加一条,一次添加多条,Bulk插入多条)
1,insert语句 insert into 表一(字段一,字段二,字段三) value(值一,值二,值三) 2,sql 插入多条语句,其中完整值之间用逗号分割 insert into 表一(字段一, ...
- 通俗版解释网关,IP地址,ARP欺骗,DDOS攻击
计算机主机网关的作用是什么? 假设你的名字叫小不点,你住在一个大院子里,你的邻居有很多小伙伴,在门口传达室还有个看大门的李大爷,李大爷就是你的网关.当你想跟院子里的某个小伙伴玩,只要你在院子里大喊一声 ...
- Eclipse 创建 Java 接口---Eclipse教程第11课
打开新建 Java 接口向导 新建 Java 接口向导可以创建新的 Java 接口.打开向导的方式有: 点击 File 菜单并选择 New > Interface 在 Package Explo ...
- 理解web缓存
web缓存是web用于临时存储各种资源的一种技术. web缓存大概分两种,一种是前端缓存,另一种是后端端缓存. 前端缓存 浏览器缓存 浏览器自带的缓存机制. 比如说浏览器后退前进的动作,一般使用浏览器 ...
- PoolManager
我用的PoolManager版本是5.5.2的,导入的包总共有三个文件夹:Editor,Plugins,PoolManagerExampleFiles 1.Editor这个文件夹里面的东西,顾名思义, ...
- jwt手动生成access_token
from rest_framework_jwt.settings import api_settings # 手动为用户生成tokenjwt_payload_handler = api_setting ...
- cloud.cfg_for_ubuntu
user: default disable_root: false preserve_hostname: false cloud_init_modules: - bootcmd - resizefs ...
- Linux networkmanager
我们开发的网络,出于保密,只能叫XXX网络,或者我更倾向于称之为WTF-network 由于经常处于封闭的环境,刚一接触新一点的世界,总是有那么一点猝不及防.最近发现配置的静态路由经常消失,经发现是n ...