关于伺服刹车/急停/前后设备信号对接/PLC输入输出模块的公共端介绍
一、伺服刹车
关键词:急停,急停中间继电器、刹车中间继电器,刹车使能
正文:
通常情况不用硬件为主导而用程序来主导控制,多场景应用方便修改且安全可靠。
伺服刹车硬件,一般是24v电源给进去,就会释放刹车使能。
拿一个Z轴伺服作为对象。
1.程序上控制逻辑如下
急停按钮一般都是NC触点串联在电路中,NO触点信号接入急停中间继电器线圈,急停中间继电器NO触点信号再给入PLC作为急停信号。通过下面一段程序。
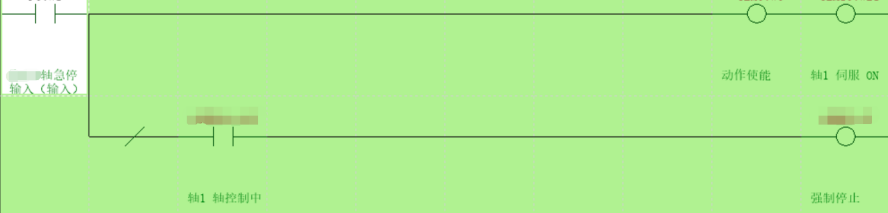
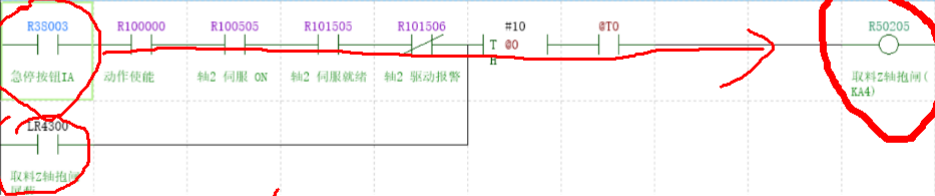
所以,一般情况下,急停没有被拍下,是有信号给plc的。此时急停信号是接通的,动作使能 伺服ON 伺服就绪是接通的,经过消抖后,抱闸线圈接通。程序这段逻辑先捋到这,抱闸线圈对于刹车中间继电器线圈,此时被接通,我们电路上会取刹车中间继电器的NC触点信号接入伺服刹车使能硬件上。所以此时刹车使能硬件是没有电源接入的,所以没有刹车。【不拍急停,伺服松开抱闸使能】
如果拍下急停按钮,急停NO给PLC,急停信号=0,抱闸KA=0,硬件上取其NC信号,刹车硬件没有接入电源,所以处于刹车状态。【拍急停,伺服抱闸】
还有一个屏蔽功能。【拍下急停,Z轴伺服抱闸,屏蔽功能打开,Z轴往下掉】
第二种情况,是取抱闸继电器NO串入抱闸电源回路。
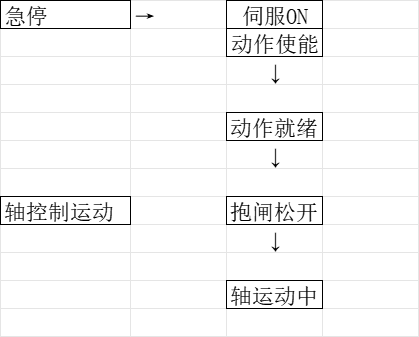
伺服ON、急停信号、抱闸三者之间的关系如下:
正常程序运行中,伺服ON=1,急停=1,抱闸继电器=1。抱闸硬件有电源所以松开。紧急情况拍急停,程序:急停=0→伺服ON=0→抱闸继电器=0。抱闸硬件无电源所以刹车。
看见刹车KA亮则无抱闸有伺服使能ON信号。
二、PLC的CPU及输入输出模块公共端
关键词:输入 输出 公共端 接线图 源型 漏型
正文:
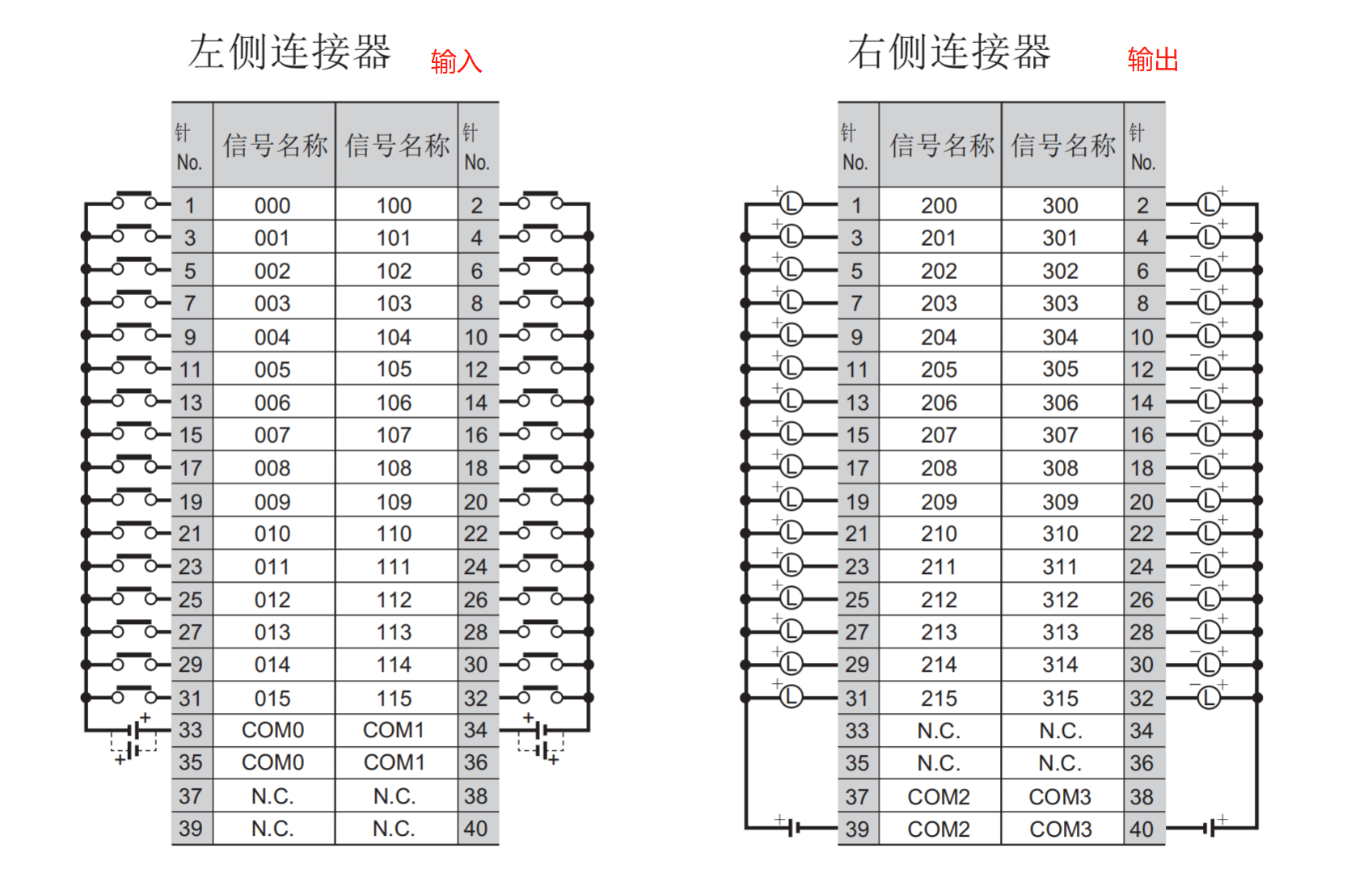
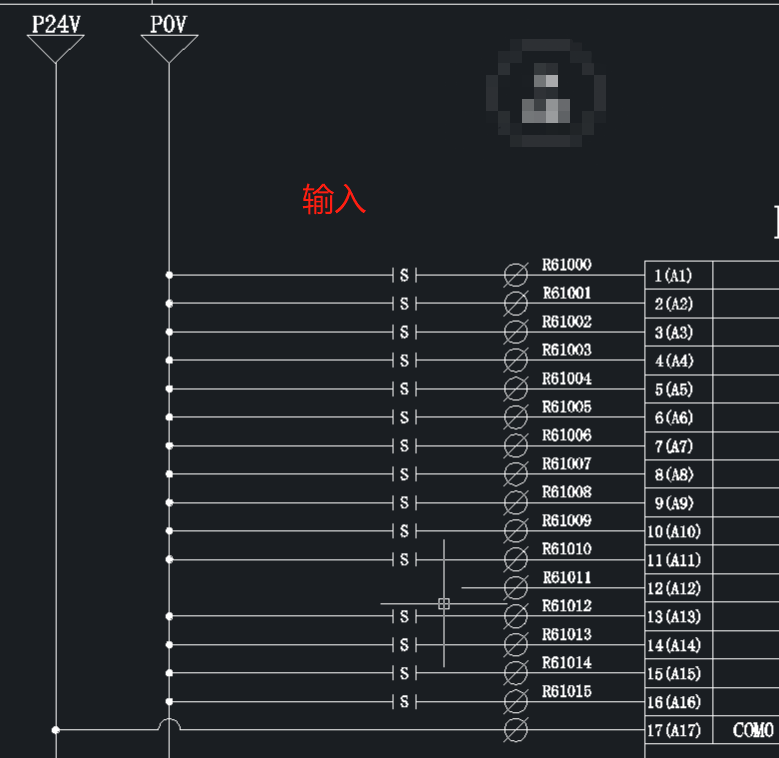
1.基恩士plc一般输入输出类型都是是NPN即漏型,汇川plc也是。而西门子一般是PNP源型。
2.漏型,在实际应用中可以记成都是低电平即0V。原理原则:只要有形成电源回路作用在光电耦合器上形成信号输入输出。
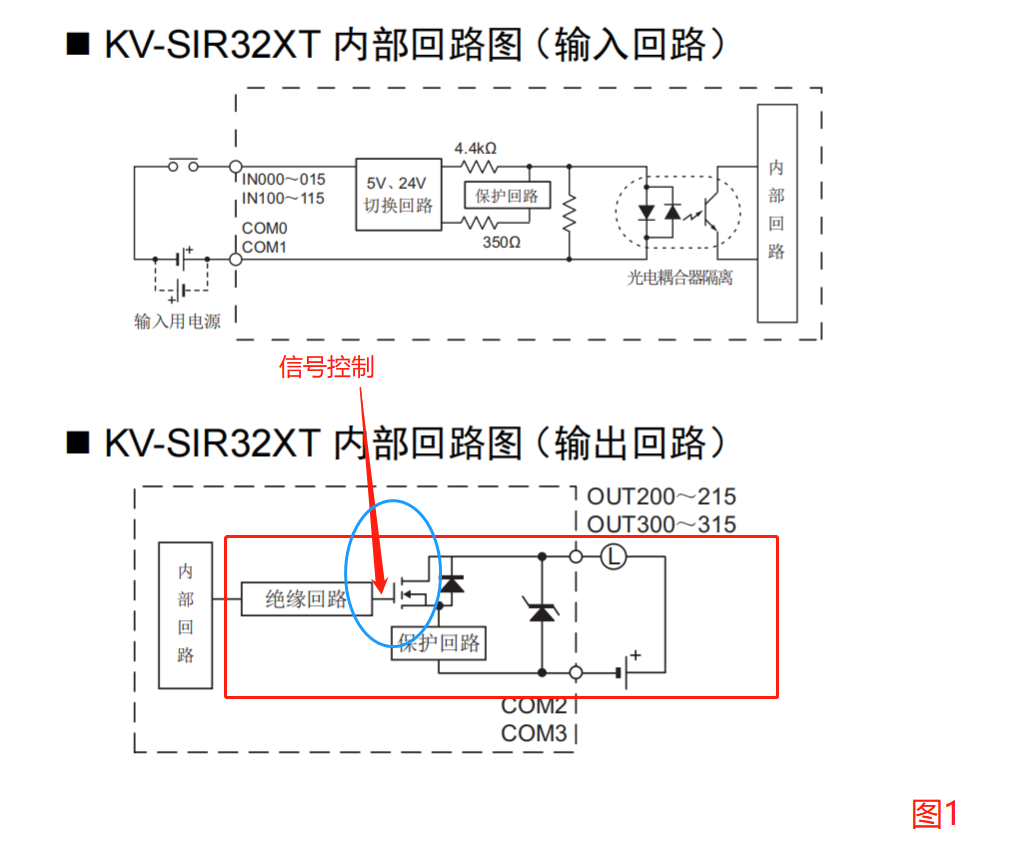
输入信号为0v,经过内置电阻,输入公共端为24v。【若是干湿节点可以切换】。
细致分析输出公共端举例:图1输出的内部接线图,我们只看MOS场效应管,和负载L以及DC电源组成的回路。
场效应管的G栅极与S源极施加电压导通后(相当于开关),漏极与源极就会导通与负载和电源形成正确的回路。
一旦控制信号接通施加电压后,负载就会接通。
因此基恩士NPN型plc的输出公共端是0V。
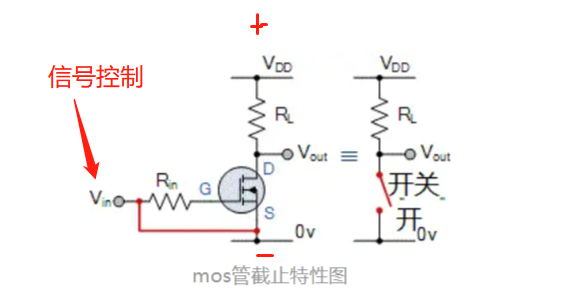
引用MOS管控制原理介绍链接:https://zhuanlan.zhihu.com/p/519594505
如下图:
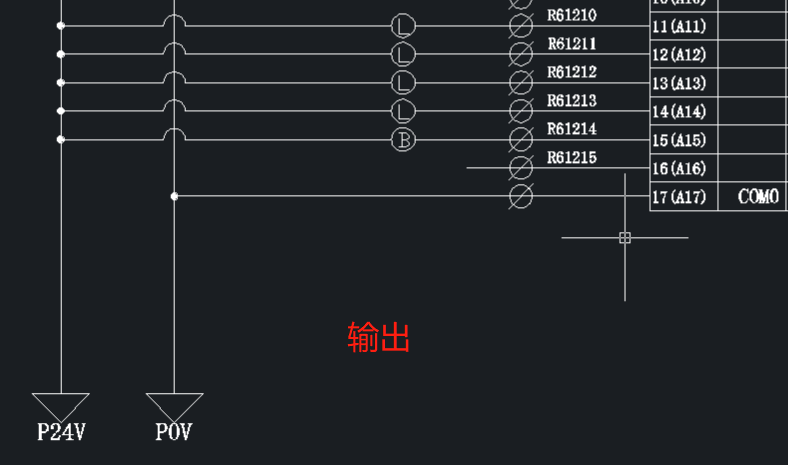
源型反之。
三、前后设备对接交互信号介绍
关键词:前后机 航空对接插头 前机 本机 后机 请求 允许 完成 就绪 本机电源
此类交互信号传递类型为IO信号,电路上硬件连线即可完成。交互逻辑如下
前机 本机 后机
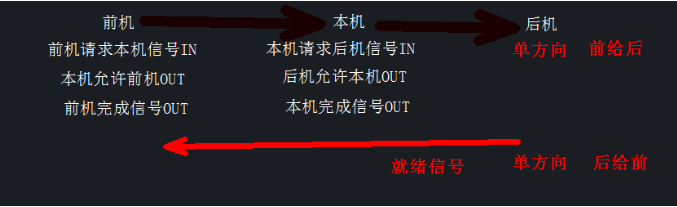
交互一般需要8个信号:4DI、4DO。
设计一台设备只需要站在本机角度去罗列,如下。
本机输入DI: 前机请求 前机完成 后机就绪 后机允许。
本机输出DO: 本机允许 本机就绪 本机请求 本机完成。
关于伺服刹车/急停/前后设备信号对接/PLC输入输出模块的公共端介绍的更多相关文章
- 【树莓派】Python开发工控机急停设计
背景 我们在一些工业产品中使用树莓派替代了PLC和上位机,并借助树莓派的算力将AI和机器视觉引入工业领域. 以前的产品都不存在动作机构,仅仅将结果输出到指示灯.蜂鸣器或者显示器上,没有安全隐患, 现在 ...
- [UE4]点积、余弦和急停
急停控制:
- TCP控制位 sendUrgentData 队列 队列元素 优先级 极限 急停 置顶
Socket (Java Platform SE 7 ) https://docs.oracle.com/javase/7/docs/api/java/net/Socket.html#sendUrge ...
- iNeuOS工业互联平台,机床&PLC硬件网关与平台无缝对接,进行数据交互
目 录 1. 概述... 2 2. 平台演示... 2 3. 硬件网关的基本操作... 3 3.1 数据采集... 3 3.2 ...
- Akka(25): Stream:对接外部系统-Integration
在现实应用中akka-stream往往需要集成其它的外部系统形成完整的应用.这些外部系统可能是akka系列系统或者其它类型的系统.所以,akka-stream必须提供一些函数和方法来实现与各种不同类型 ...
- 关于STM32数据手册中的定时器信号
首先,我们可以看到这个图大概有两个不分,一个部分是时钟源,另一个部分则是输入输出 时钟源计数,到CNT计数器,然后根据捕获比较寄存器进行记录或比较.记录或比较有不同的配置. 首先是TI信号TI1 TI ...
- 倍福TwinCAT(贝福Beckhoff)应用教程13.1 TwinCAT控制松下伺服 NC高级
本节主要演示了使用自定义函数实现电机的运动(梯形曲线和S曲线都有实现),这里的JOG+和JOG-,针对单个关节实现了PTP的运动(跟贝福的MoveAbsolute功能块实现效果一致),在此没有介绍运动 ...
- Linux信号
信号本质上就是一个软件中断,它既可以作为两个进程间的通信的方式, 更重要的是, 信号可以终止一个正常程序的执行, 通常被用于处理意外情况 ,* 信号是异步的, 也就是进程并不知道信号何时会到达 $ki ...
- 利用过采样技术提高ADC测量微弱信号时的分辨率
1. 引言 随着科学技术的发展,人们对宏观和微观世界逐步了解,越来越多领域(物理学.化学.天文学.军事雷达.地震学.生物医学等)的微弱信号需要被检测,例如:弱磁.弱光.微震动.小位移.心电.脑电等[1 ...
- SDC(7) -- 关于使能信号的时序放松
先看下图: 假如使能信号的有效时间为时钟周期的2倍,此时需要使用 set_multicycle_path 放松使能信号 sel_xy_nab ,若是每个寄存器使能端都约束一遍,那就太麻烦了: 这时可以 ...
随机推荐
- Kali 获取任意设备信息
注意:仅供测试 请勿商用 可获取对方位置 误差小于500m 访问摄像头 访问麦克风 一. 安装环境 #01 mac 安装虚拟机 下载地址:https://www.macyy.cn/archives/1 ...
- Zabbix“专家坐诊”第192期问答汇总
问题一 Q:请问下,客户机snmptrap发告警为啥server web收不到,关键是snmptrap日志已经收到,zabbix server配置以及开启snmptrap=1 snmptrap=var ...
- idea editor tabs 标题头 多行显示,全部显示出来 (vscode也放一个)
- 动态挂载指定vue组件 Vue.extend $mount('#aaa111')
模板中要有定位 <template> <div id="aaa111"></div> </template> 指定某个函数执行 im ...
- ubuntu中在命令行如何打开图形界面的文件夹的几种方法
方法一: 使用自带的命令:nautilus . 打开当前文件夹 nautilus . 打开指定路径文件夹 nautilus ddd/ccc/ 方法二:xdg-open xdg-open 命令相当于在 ...
- 求正整数 n 的所有正因数的个数,qq 次询问。
https://ac.nowcoder.com/acm/contest/22769/A 链接:https://ac.nowcoder.com/acm/contest/22769/A来源:牛客网 时间限 ...
- 新闻新体验!3DCAT助力开启红网“元宇宙”新闻直播间
2022年10月20日,湖南红网新媒体集团"华章·20--红网时刻新闻党的二十大报道云展厅"正式上线.深入到新闻元宇宙,开拓新的传播领域,这也是红网党政新媒体元宇宙传播应用实验室的 ...
- 三维模型3DTile格式轻量化云端处理技术方法分析
三维模型3DTile格式轻量化云端处理技术方法分析 在现代的地理信息系统 (GIS) 中,3D Tiles 是一种很重要的数据格式,用于存储和传输大规模地理空间数据.然而,由于其数据密度高,传输和加载 ...
- 记录-VueJs中如何使用Teleport组件
这里给大家分享我在网上总结出来的一些知识,希望对大家有所帮助 在DOM结构相对比较复杂,层级嵌套比较深的组件内,需要根据相对应的模块业务处理一些逻辑,该逻辑属于当前组件 但是从整个页面应用的视图上看, ...
- 使用自签名证书在Docker中部署Asp.Net Core(Abp)项目
一 编写Dockerfile文件 FROM mcr.microsoft.com/dotnet/aspnet:6.0 COPY / /app WORKDIR /app EXPOSE 80 ENTRYPO ...