第5章节 BJROBOT SLAM 构建地图
第五章节 BJROBOT SLAM 构建地图
建地图前说明:请确保你的小车已经校正好 IMU、角速度、线速度,虚拟机配置好 ROS 网络的前提进行,否则会造成构建地图无边界、虚拟机端无法正常收到小车主控端发布的话题数据等异常情况!!
1.把小车平放在你想要构建地图的区域内地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动 roslaunch znjrobot bringup.launch。
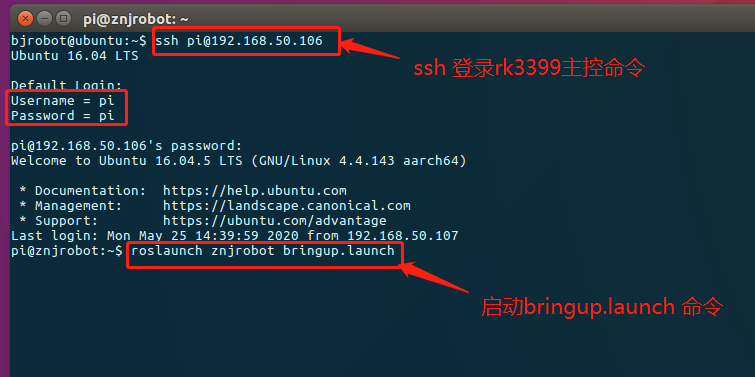
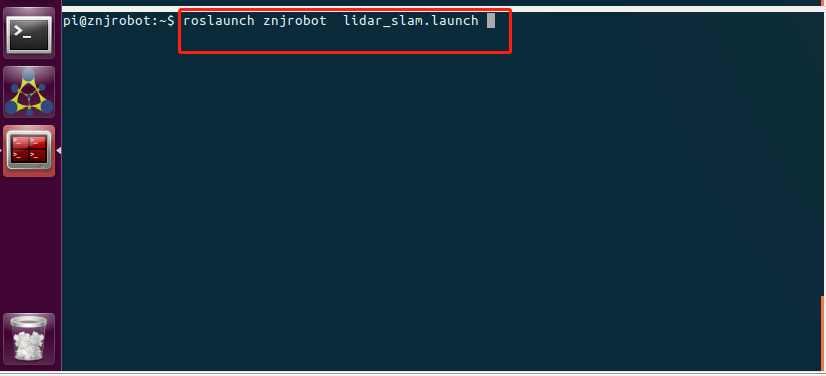
2.在虚拟机端打开一个终端,ssh 过去主控端启动roslaunch znjrobot lidar_slam.launch。
3.在虚拟机端打开一个终端,启动 rviz:rosrun rviz rviz
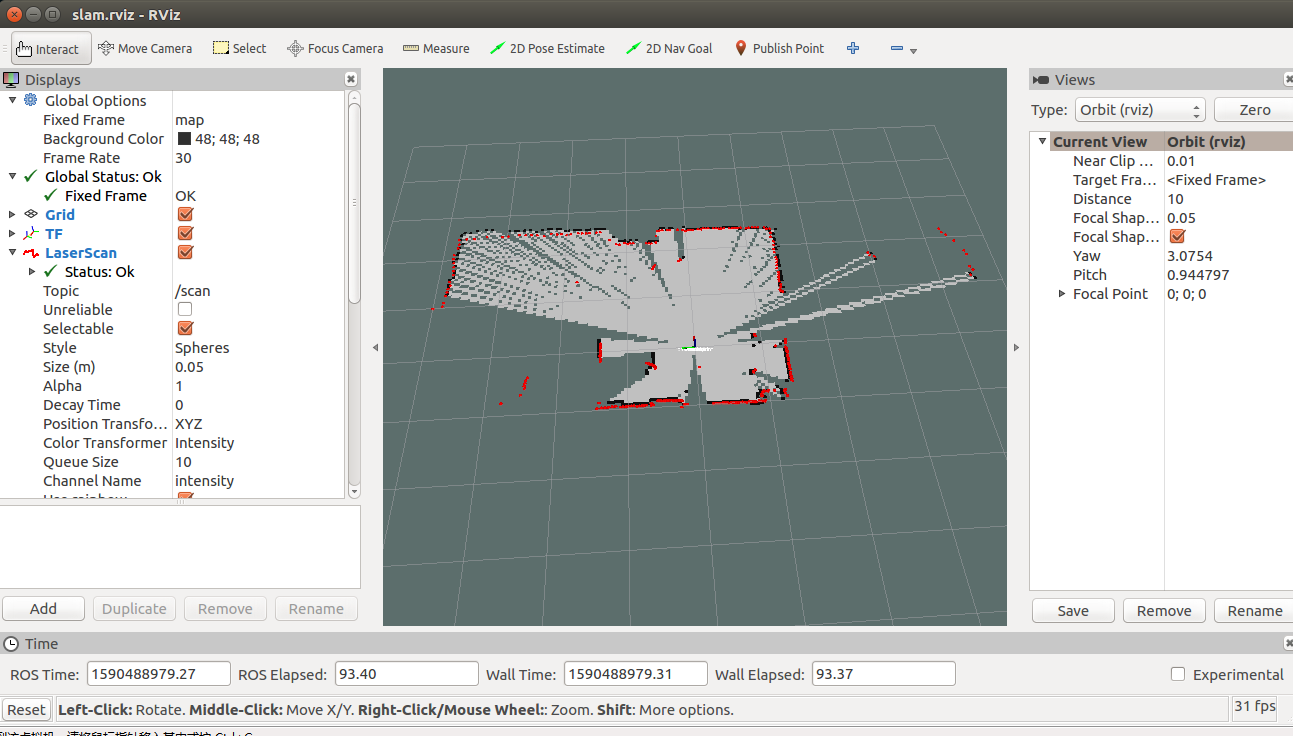
4.全屏化后点击 File,点击 Open Config,
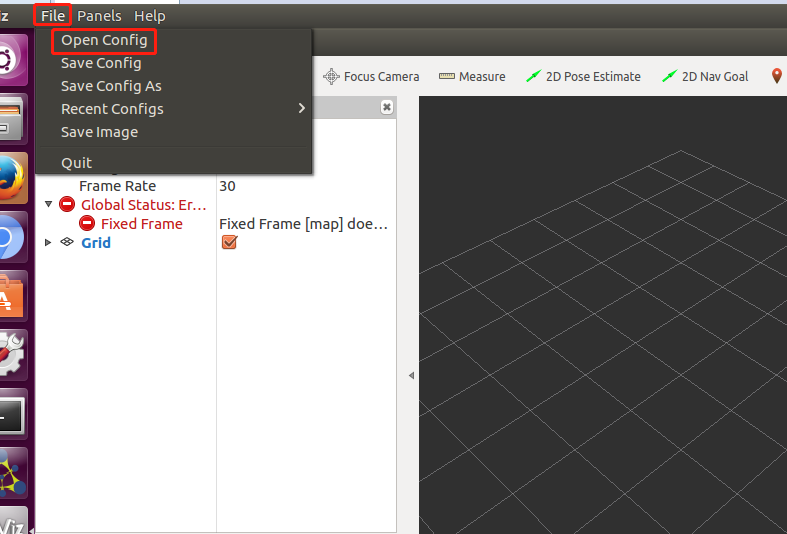
5.找到路径下~/catkin_ws/src/znjrobot_project/znjrobot/rviz/slam.rviz,的slam.rviz 文件。点 Open

6.把 rviz 窗口调整到合适位置,调整方法:用鼠标滚轮点住灰色区域,可以拖动地图;鼠标滚轮上下滚动可以放大缩小地图;鼠标左键点住灰色区域可以翻转地图。
7.在虚拟机端,打开一个终端启动键盘控制,对小车进行移动控制,完成地图构建。
8.在虚拟机端,再打开一个终端,ssh 过去主控端,进入到
~/catkin_ws/src/znjrobot_project/znjrobot/maps 路径下,执行保存地图脚本。

执行完成后,即可查看到在目录下重新生成的house.pgm文件
第5章节 BJROBOT SLAM 构建地图的更多相关文章
- 第14章节 BJROBOT karto 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
建地图前说明:请确保你的小车已经校正好 IMU.角速度.线速度,虚拟机配置好 ROS 网络的前提进行,否则会造成构建地图无边界.虚拟机端无法正常收到小车主控端发布的话题数据等异常情况!! 1.把小车平 ...
- 第十五章节 BJROBOT cartographer 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
建地图前说明:请确保你的小车已经校正好 IMU.角速度.线速度,虚拟机配置好 ROS 网络的前提进行,否则会造成构建地图无边界.虚拟机端无法正常收到小车主控端发布的话题数据等异常情况!! 1.把小车平 ...
- 第一章节 BJROBOT ROS 网络配置及移动控制【ROS全开源阿克曼转向智能网联无人驾驶车】
版权声明:该教程版权归北京智能佳科技有限公司所有,未经公司授权禁止引用.发布.转载等,否则将追究其法律责任. 使用前说明:本使用文档说明略微简明,请结合指导视频进行操作会更容易理解!! 第一章节 BJ ...
- 第十九章节 BJROBOT 安卓手机 APP 导航【ROS全开源阿克曼转向智能网联无人驾驶车】
导航前说明:一定要确保你小车在构建好地图的基础上进行! 1.把小车平放在你想要构建地图区域的地板上,打开资料里的虚拟机,打开一个终端, ssh 过去主控端启动roslaunch znjrobot br ...
- 第六章节 BJROBOT 动态导航壁障
导航前说明:一定要确保你小车在构建好地图的基础上进行! 1.把小车平放在你想要构建地图区域的地板上,打开资料里的虚拟机,打开一个终端, ssh 过去主控端启动 roslaunch znjrobot b ...
- 第八章节 BJROBOT hector 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot bringup.launch. 2.在虚拟机端打开一个终端,ssh 过去主控端启动r ...
- 第七章节 BJROBOT 选择区域自主构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot bringup.launch 2.在虚拟机端再打开一个终端,ssh 过去主控端启动r ...
- 第十八章节 BJROBOT 安卓手机 APP 建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobotbringup.launch 2.在虚拟机端再打开一个终端,ssh 过去主控端启动ro ...
- 软件篇-03-基于ORB_SLAM2手写SLAM稠密地图构建实现
本文使用的方法不是从内部修改ORBSLAM2源码以获取稠密点云,而是先从ZED2 sdk获取以摄像头坐标系为描述的三维点云/作为点云地图的一个子集,然后融合IMU与ORB_SLAM2进行实时定位,通过 ...
随机推荐
- FOFA链接爬虫爬取fofa spider
之前一直是用的github上别人爬取fofa的脚本,前两天用的时候只能爬取第一页的链接了,猜测是fofa修改了一部分规则(或者是我不小心删除了一部分文件导致不能正常运行了) 于是重新写了一下爬取fof ...
- 利用flask框架实现对用户的注册登录
------------------------------------(分割线)----------------------------------------------------------- ...
- leetcode(三)——2020.05.31
(上周7道题完成) 本周leetcode题目(from leetcode hot100): 15 17 19 21 33 94 42 额外完成: 22(回溯), 8, 31,200
- Linux 查看CPU型号,内存大小,硬盘空间的命令
1 查看CPU 1.1 查看CPU个数 # cat /proc/cpuinfo | grep "physical id" | uniq | wc -l 1.2 查看CPU核数 # ...
- 一个最简单的typescript工程
初级: 1.新建一个文件夹~/a/ 2.cd ~/a/ 3.npm init -y 生成package.json 4.新建index.ts,内容:console.log(" ...
- 设置定时任务用rman删除归档日志脚本
之前使用数据库数据迁移过程中出现产生大量归档日志的情况(由于迁移的目标库是DG,必须开启归档). 为避免出现归档空间爆掉的情况,设置定时任务删除系统当前时间30分钟前的归档日志,脚本如下: cat d ...
- 手写开源ORM框架介绍
手写开源ORM框架介绍 简介 前段时间利用空闲时间,参照mybatis的基本思路手写了一个ORM框架.一直没有时间去补充相应的文档,现在正好抽时间去整理下.通过思路历程和代码注释,一方面重温下知识,另 ...
- Mybatis(一)--简介
一.JDBC问题分析: 从之前我们所写到过的jdbc代码或工具类可知: 1).数据库连接创建,释放频繁将造成系统资源浪费从而影响系统性能: 2).SQL语句在代码中硬编码,造成代码不易维护,SQL变动 ...
- .NET生态系统掠影
如果你是一名开发人员,想要进入到.NET的世界,你需要知道都有哪些可能.由于.NET Framework是..NET生态系统中最流行的技术,你可以用它来构建各种各样的应用程序,但是最近,出现了一些新的 ...
- 【python爬虫】一个简单的爬取百家号文章的小爬虫
需求 用"老龄智能"在百度百家号中搜索文章,爬取文章内容和相关信息. 观察网页 红色框框的地方可以选择资讯来源,我这里选择的是百家号,因为百家号聚合了来自多个平台的新闻报道.首先看 ...