Sift算子特征点提取、描述及匹配全流程解析
Sift之前的江湖
在Sift横空出世之前,特征点检测与匹配江湖上占据霸主地位的是角点检测家族。先来探究一下角点家族不为人知的恩怨情仇。
角点家族的族长是Moravec在1977年提出的Moravec角点检测算子,它是一种基于灰度方差的角点检测方法,该算子计算图像中某个像素点沿水平、垂直方向上的灰度差异,以确定角点位置,Moravec是第一个角点检测算法,也是角点家族的开山鼻祖。
角点家族的九袋长老是Chris Harris & Mike Stephens在1988年提出的Harris角点检测算子。Harris不止是考察水平、垂直4个方向上的灰度差异,而是考察了所有方向上的灰度差异,并且具有旋转不变性和对部分仿射变换的稳定性。Harris是整个角点检测家族的颜值担当。
角点家族的大护法是J.Shi和C.Tomasi在1994年提出的Shi-Tomasi角点检测算子,它是对Harris角点算子的改进,并且有一个直接“叫嚣”Harris算子的名字——“Good Features to Track”,在Opencv中实现函数是goodfeaturesToTrack。它通过考察自相关矩阵M的两个特征值中的较小者来确定就角点,大部分情况下,有比Harris更好的检测效果。
角点家族洪兴堂堂主是E.Rosten和T.Drummond在2006年提出的FAST(Feature from Accelerated Segment Test)算子。它通过考察像素点与其邻域内16个像素点的差异来确定特征点(角点),并且通过分割测试算法对检测效率做了极大的提升。它信奉“天下武功,唯快不破”的真理,在快的道路上锐意进取,基本可以满足实时检测系统的要求,在现今计算机视觉领域赚足了眼球。
角点家族这种群雄逐鹿的局面一直持续了很多年,大家你追我赶,在群主Moravec的带领下家族基于日渐殷实。直到20多年后的1999年的某天拂晓,一个叫Sift的后生叩响了角点家族的鎏金铁门。
Sift闪亮登场
1999年,大不列颠哥伦比亚大学的David G.Lowe教授在现有基于不变量技术的特征检测方法基础上,提出了一种基于尺度空间的,对图像缩放、旋转、甚至仿射变换保持不变性的图像局部特征描述算子——Sift(尺度不变特征变换),全称是Scale Invariant Feature Transform,并且在2004年,又对Sift算法做了更为系统的完善。下边这位老爷子就是Lowe。
Sift提取图像的局部特征,在尺度空间寻找极值点,并提取出其位置、尺度、方向信息。Sfit的应用范围包括物体辨别、机器人地图感知与导航、影响拼接、3D模型建立、手势识别、影响追踪等。
Sift特征的特点:
1. 对旋转、尺度缩放、亮度变化保持不变性,对视角变化、噪声等也存在一定程度的稳定性;
2. 独特性,信息量丰富,适用于在海量特征数据中进行快速,准确的匹配;
3. 多量性,即使少数几个物体也可以产生大量的Sfit特征向量;
4. 可扩展性,可以很方便的与其他形式的特征向量进行联合;
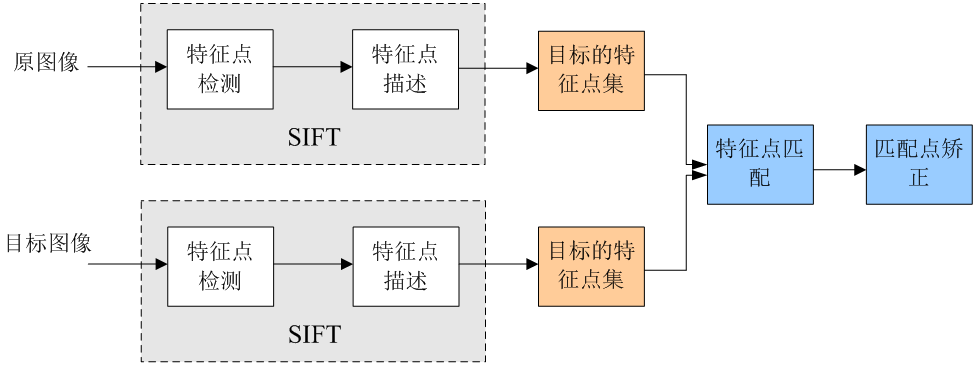
Sfit算法的实质是在不同的尺度空间上查找关键点(特征点),计算关键点的大小、方向、尺度信息,利用这些信息组成关键点对特征点进行描述的问题。Sift所查找的关键点都是一些十分突出,不会因光照,仿射便函和噪声等因素而变换的“稳定”特征点,如角点、边缘点、暗区的亮点以及亮区的暗点等。匹配的过程就是对比这些特征点的过程,这个流程可以用下图表述:
Sfit特征提取和匹配具体步骤
1. 生成高斯差分金字塔(DOG金字塔),尺度空间构建
2. 空间极值点检测(关键点的初步查探)
3. 稳定关键点的精确定位
4. 稳定关键点方向信息分配
5. 关键点描述
6. 特征点匹配
以下对这6个步骤逐一说明。
1. 生成高斯差分金字塔(DOG金字塔),尺度空间构建
主要思想是通过对原始图像进行尺度变换,获得图像多尺度下的尺度空间表示序列,对这些序列进行尺度空间主轮廓的提取,并以该主轮廓作为一种特征向量,实现边缘、角点检测不同分辨率上的关键点提取等。
各尺度下图像的模糊度逐渐变大,能够模拟人在距离目标由近到远时目标物体在视网膜上的形成过程。
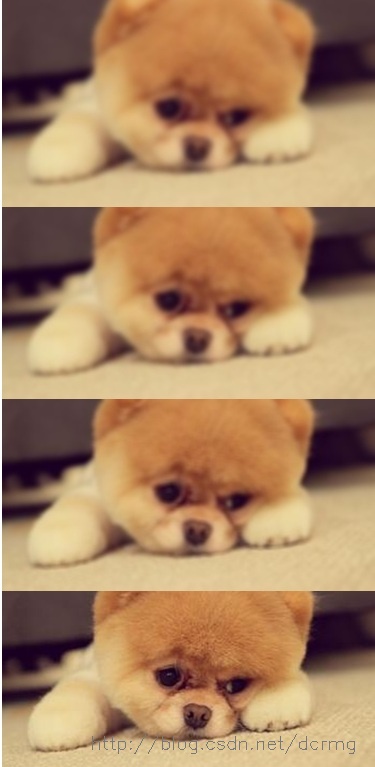
尺度空间构建的基础是DOG金字塔,DOG金字塔构建的基础是高斯金字塔,关于尺度空间、高斯金字塔、DOG金字塔的相关说明,可以参看前一篇博文《Sift中尺度空间、高斯金字塔、差分金字塔(DOG金字塔)、图像金字塔》。贴一下高斯金字塔的实例图像:

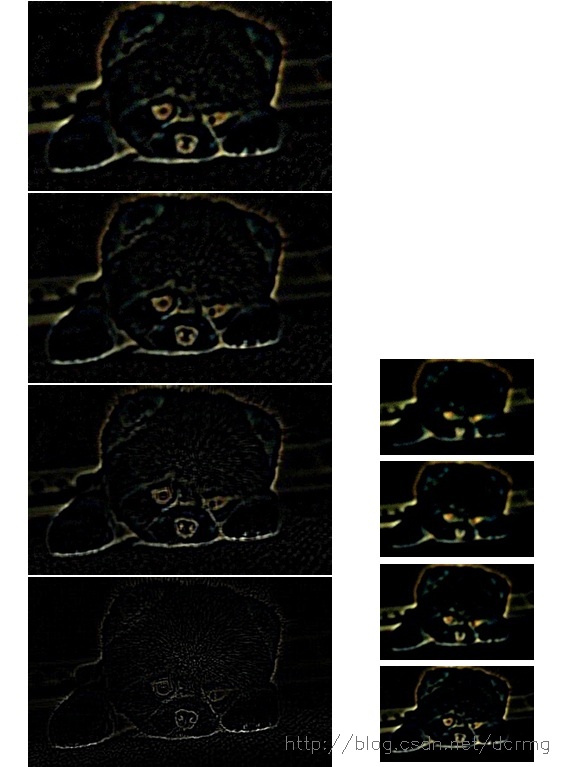
归一化的DOG金字塔实例图像:
2. 空间极值点检测(关键点的初步查探)
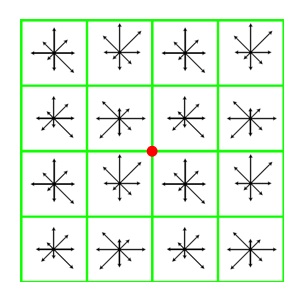
为了寻找DOG函数的极值点,每一个像素点要和它所有的相邻点比较,看其是否比它的图像域和尺度空间域的相邻点大或者小,如下图所示:
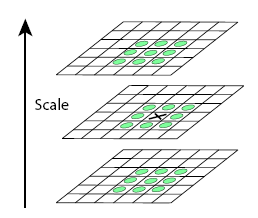
在二维图像空间,中心点与它3*3邻域内的8个点做比较,在同一组内的尺度空间上,中心点和上下相邻的两层图像的2*9个点作比较,如此可以保证检测到的关键点在尺度空间和二维图像空间上都是局部极值点。
3. 稳定关键点的精确定位
DOG值对噪声和边缘比较敏感,所以在第2步的尺度空间中检测到的局部极值点还要经过进一步的筛选,去除不稳定和错误检测出的极值点,另一点就是在构建高斯金字塔过程中采用了下采样的图像,在下采样图像中提取的极值点对应在原始图像中的确切位置,也是要在本步骤中解决的问题。
4. 稳定关键点方向信息分配
稳定的极值点是在不同尺度空间下提取的,这保证了关键点的尺度不变性。为关键点分配方向信息所要解决的问题是使得关键点对图像角度和旋转具有不变性。方向的分配是通过求每个极值点的梯度来实现的。
对于任一关键点,其梯度幅值表述为:

梯度方向为:
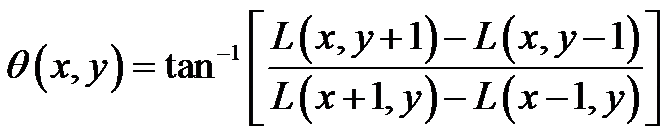
分配给关键点的方向并不直接是关键点的梯度方向,而是按照一种梯度方向直方图的方式给出的。
具体的方法是:计算以关键点为中心的邻域内所有点的梯度方向,当然梯度方向一定是在0~360°范围内,对这些梯度方向归一化到36个方向内,每个方向代表了10°的范围。然后累计落到每个方向内的关键点个数,以此生成梯度方向直方图。
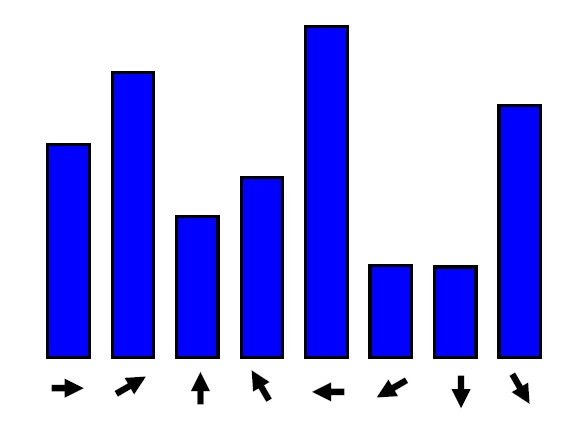
将梯度方向直方图中纵坐标最大的项代表的方向分配给当前关键点作为主方向,若在梯度直方图中存在一个相当于主峰值80%能量的峰值,则将这个方向认为是关键点的辅方向。辅方向的设计可以增强匹配的鲁棒性,Lowe指出,大概有15%的关键点具有辅方向,而恰恰是这15%的关键点对稳定匹配起到关键作用。
5. 关键点描述
对关键点的描述是后续实现匹配的关键步骤,描述其实就是一种以数学方式定义关键的过程。描述子不但包含关键点,也包括关键点周围对其有贡献的邻域点。
描述的思路是:对关键点周围像素区域分块,计算快内梯度直方图,生成具有独特性的向量,这个向量是该区域图像信息的一种抽象表述。
如下图,对于2*2块,每块的所有像素点的荼毒做高斯加权,每块最终取8个方向,即可以生成2*2*8维度的向量,以这2*2*8维向量作为中心关键点的数学描述。
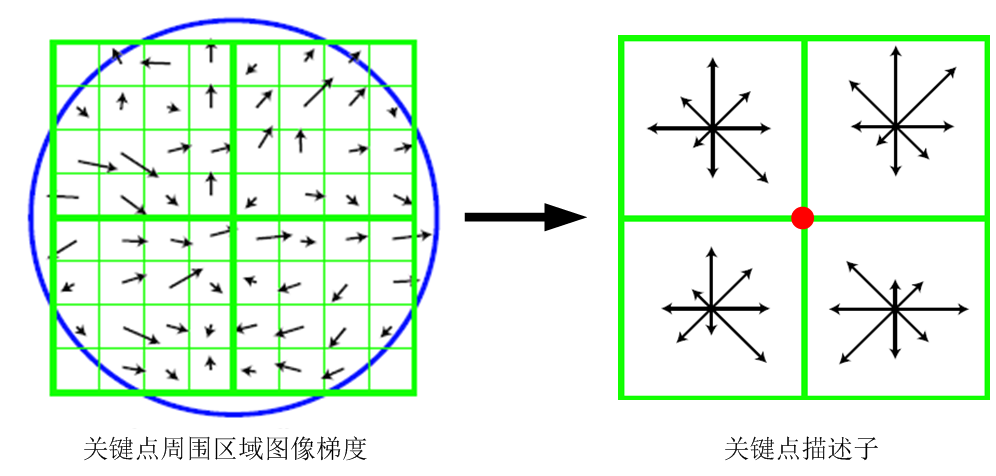
David G.Lowed的实验结果表明:对每个关键点,采用4*4*8共128维向量的描述子进项关键点表征,综合效果最佳:
6. 特征点匹配
特征点的匹配是通过计算两组特征点的128维的关键点的欧式距离实现的。欧式距离越小,则相似度越高,当欧式距离小于设定的阈值时,可以判定为匹配成功。
Sift特征匹配效果:

Sift算子特征点提取、描述及匹配全流程解析的更多相关文章
- 利用SIFT进行特征匹配
SIFT算法是一种基于尺度空间的算法.利用SIFT提取出的特征点对旋转.尺度变化.亮度变化具有不变性,对视角变化.仿射变换.噪声也有一定的稳定性. SIFT实现特征的匹配主要包括四个步骤: 提取特征点 ...
- Opencv Sift算子特征提取与匹配
SIFT算法的过程实质是在不同尺度空间上查找特征点(关键点),用128维方向向量的方式对特征点进行描述,最后通过对比描述向量实现目标匹配. 概括起来主要有三大步骤: 1.提取关键点: 2.对关键点附加 ...
- opencv学习之路(35)、SURF特征点提取与匹配(三)
一.简介 二.opencv中的SURF算法接口 三.特征点匹配方法 四.代码 1.特征点提取 #include "opencv2/opencv.hpp" #include < ...
- sift算法特征点如何匹配?
https://www.zhihu.com/question/23371175 我需要把一张照片和训练集中的图片进行匹配.我把一张照片提取特征值并建立kd树,然后把训练集的图片依次读进来,然后把图片的 ...
- Opencv Surf算子中keyPoints,描述子Mat矩阵,配对向量DMatch里都包含了哪些好玩的东东?
Surf算法是一把牛刀,我们可以很轻易的从网上或各种Opencv教程里找到Surf的用例,把例程中的代码或贴或敲过来,满心期待的按下F5,当屏幕终于被满屏花花绿绿的小圆点或者N多道连接线条霸占时,内心 ...
- 【技术翻译】SIFT算子原理及其实现 (一)介绍
介绍 匹配不同图片的特征是计算机视觉常见的问题. 当所有要匹配的图片很相似的时候(大小,方位),简单的角点检测算子就可以匹配,但是,当你的图片大小,方位不同的时候,你就要用到尺度不变特征变换(scal ...
- 特征点提取之Harris角点提取法
1. 特征点提取的意义 2.角点 3. Harris角点检測的基本原理 4.Harris角点检測算法的步骤 5.Harris角点提取算法设计 <span style="font-siz ...
- django路由匹配、反向解析、无名有名反向解析、路由分发、名称空间
目录 django请求生命周期流程图 1.Django请求的生命周期的含义 2.Django请求的生命周期图解及流程 3.Django的请求生命周期(分布解析) 路由层 1.路由匹配 2.path转换 ...
- SIFT 特征点提取算法
SIFT特征点相对于ORB计算速度较慢,在没有GPU加速情况下,无法满足视觉里程计的实时性要求,或者无法运行在手机平台上,但是效果更好,精度更高.在应用时可以择优选取,了解其本质原理的动机是为了自己使 ...
随机推荐
- Day4晚笔记
数据结构 并查集:捆绑两个点的信息,判断对错 倍增:LCA, 字符串 hash,模拟, 最小表示法 给定一个环状字符串,切开,使得字符串的字典序最小 图和树 割点,割边,强联通分量 点双联通分量 (把 ...
- [ Eclipse ] [ Problem ] Eclipse 無法開啟問題
因為 Eclipse 在設定環境的過程掛掉太多次,擷取一些網路上優秀的文章當作備份 http://www.ewdna.com/2013/12/Eclipse-Loading-Workbench.htm ...
- HttpUtility.UrlEncode,Server.UrlEncode 的区别
引用: 1.HttpUtility.UrlEncode,HttpUtility.UrlDecode是静态方法,而Server.UrlEncode,Server.UrlDecode是实例方法. 2.Se ...
- var、let和const的区别
var 首先var有变量提升 console.log(a); // undefined var a = 1; function也存在提升现象 console.log(b); //function b( ...
- JS学习笔记 - Try / Catch / Finally
<body> <p>请输入 5 和 10 之间的一个数:</p> <input id="demo" type="text&quo ...
- Android系统如何管理自己内存的?
本文来自http://blog.csdn.net/liuxian13183/ ,引用必须注明出处! 机缘巧合写下这篇博客,作为个人工作经验的总结,不足之处,随后补上. 安卓是基于Linux2.6内核的 ...
- 题目1205:N阶楼梯上楼问题(2008年华中科技大学计算机保研机试真题:递推求解)
题目1205:N阶楼梯上楼问题 时间限制:1 秒 内存限制:128 兆 特殊判题:否 提交:2447 解决:927 题目描写叙述: N阶楼梯上楼问题:一次能够走两阶或一阶,问有多少种上楼方式. (要求 ...
- 【天气APP】之桌面时钟witget组件
桌面时钟之组件开发: 整个流程例如以下: 下载地址demo:www.github.com/xufeifandj service+组件+广播进行后台实时更新时间 (一)开机广播监听开机启动service ...
- docker第一章
简介 Docker 是 Docker.Inc 公司开源的一个基于 LXC技术之上构建的Container容器引擎, 源代码托管在 GitHub 上, 基于Go语言并遵从Apache2.0协议开源. D ...
- String.Empty,NULL和""的区别
String.Empty,NULL和""的区别 string.Empty就相当于"" 一般用于字符串的初始化 比如: string a; Console.Wri ...