基于深度学习的人脸识别系统(Caffe+OpenCV+Dlib)【三】VGG网络进行特征提取
前言
基于深度学习的人脸识别系统,一共用到了5个开源库:OpenCV(计算机视觉库)、Caffe(深度学习库)、Dlib(机器学习库)、libfacedetection(人脸检测库)、cudnn(gpu加速库)。
用到了一个开源的深度学习模型:VGG model。
最终的效果是很赞的,识别一张人脸的速度是0.039秒,而且最重要的是:精度高啊!!!
CPU:intel i5-4590
GPU:GTX 980
系统:Win 10
OpenCV版本:3.1(这个无所谓)
Caffe版本:Microsoft caffe (微软编译的Caffe,安装方便,在这里安利一波)
Dlib版本:19.0(也无所谓
CUDA版本:7.5
cudnn版本:4
libfacedetection:6月份之后的(这个有所谓,6月后出了64位版本的)
这个系列纯C++构成,有问题的各位朋同学可以直接在博客下留言,我们互相交流学习。
====================================================================
本篇是该系列的第三篇博客,介绍如何使用VGG网络模型与Caffe的 MemoryData层去提取一个OpenCV矩阵类型Mat的特征。
思路
VGG网络模型是牛津大学视觉几何组提出的一种深度模型,在LFW数据库上取得了97%的准确率。VGG网络由5个卷积层,两层fc图像特征,一层fc分类特征组成,具体我们可以去读它的prototxt文件。这里是模型与配置文件的下载地址。
http://www.robots.ox.ac.uk/~vgg/software/vgg_face/
话题回到Caffe。在Caffe中提取图片的特征是很容易的,其提供了extract_feature.exe让我们来实现,提取格式为lmdb与leveldb。关于这个的做法,可以看我的这篇博客:
http://blog.csdn.net/mr_curry/article/details/52097529
显然,我们在程序中肯定是希望能够灵活利用的,使用这种方法不太可行。Caffe的Data层提供了type:MemoryData,我们可以使用它来进行Mat类型特征的提取。
注:你需要先按照本系列第一篇博客的方法去配置好Caffe的属性表。
http://blog.csdn.net/mr_curry/article/details/52443126
实现
首先我们打开VGG_FACE_deploy.prototxt,观察VGG的网络结构。
有意思的是,MemoryData层需要图像均值,但是官方网站上并没有给出mean文件。我们可以通过这种方式进行输入:
mean_value:129.1863
mean_value:104.7624
mean_value:93.5940我们还需要修改它的data层:(你可以用下面这部分的代码去替换下载下来的prototxt文件的data层)
layer {
name: "data"
type: "MemoryData"
top: "data"
top: "label"
transform_param {
mirror: false
crop_size: 224
mean_value:129.1863
mean_value:104.7624
mean_value:93.5940
}
memory_data_param {
batch_size: 1
channels:3
height:224
width:224
}
}
为了不破坏原来的文件,把它另存为vgg_extract_feature_memorydata.prototxt。

好的,然后我们开始编写。添加好这个属性表:
然后,新建caffe_net_memorylayer.h、ExtractFeature_.h、ExtractFeature_.cpp开始编写。
caffe_net_memorylayer.h:
#include "caffe/layers/input_layer.hpp"
#include "caffe/layers/inner_product_layer.hpp"
#include "caffe/layers/dropout_layer.hpp"
#include "caffe/layers/conv_layer.hpp"
#include "caffe/layers/relu_layer.hpp"
#include <iostream>
#include "caffe/caffe.hpp"
#include <opencv.hpp>
#include <caffe/layers/memory_data_layer.hpp>
#include "caffe/layers/pooling_layer.hpp"
#include "caffe/layers/lrn_layer.hpp"
#include "caffe/layers/softmax_layer.hpp"
// must predefined
caffe::MemoryDataLayer<float> *memory_layer;
caffe::Net<float>* net;ExtractFeature_.h
#include <opencv.hpp>
using namespace cv;
using namespace std;
std::vector<float> ExtractFeature(Mat FaceROI);//给一个图片 返回一个vector<float>容器
void Caffe_Predefine();ExtractFeature_.cpp:
#include <ExtractFeature_.h>
#include <caffe_net_memorylayer.h>
namespace caffe
{
extern INSTANTIATE_CLASS(InputLayer);
extern INSTANTIATE_CLASS(InnerProductLayer);
extern INSTANTIATE_CLASS(DropoutLayer);
extern INSTANTIATE_CLASS(ConvolutionLayer);
REGISTER_LAYER_CLASS(Convolution);
extern INSTANTIATE_CLASS(ReLULayer);
REGISTER_LAYER_CLASS(ReLU);
extern INSTANTIATE_CLASS(PoolingLayer);
REGISTER_LAYER_CLASS(Pooling);
extern INSTANTIATE_CLASS(LRNLayer);
REGISTER_LAYER_CLASS(LRN);
extern INSTANTIATE_CLASS(SoftmaxLayer);
REGISTER_LAYER_CLASS(Softmax);
extern INSTANTIATE_CLASS(MemoryDataLayer);
}
template <typename Dtype>
caffe::Net<Dtype>* Net_Init_Load(std::string param_file, std::string pretrained_param_file, caffe::Phase phase)
{
caffe::Net<Dtype>* net(new caffe::Net<Dtype>("vgg_extract_feature_memorydata.prototxt", caffe::TEST));
net->CopyTrainedLayersFrom("VGG_FACE.caffemodel");
return net;
}
void Caffe_Predefine()//when our code begining run must add it
{
caffe::Caffe::set_mode(caffe::Caffe::GPU);
net = Net_Init_Load<float>("vgg_extract_feature_memorydata.prototxt", "VGG_FACE.caffemodel", caffe::TEST);
memory_layer = (caffe::MemoryDataLayer<float> *)net->layers()[0].get();
}
std::vector<float> ExtractFeature(Mat FaceROI)
{
caffe::Caffe::set_mode(caffe::Caffe::GPU);
std::vector<Mat> test;
std::vector<int> testLabel;
std::vector<float> test_vector;
test.push_back(FaceROI);
testLabel.push_back(0);
memory_layer->AddMatVector(test, testLabel);// memory_layer and net , must be define be a global variable.
test.clear(); testLabel.clear();
std::vector<caffe::Blob<float>*> input_vec;
net->Forward(input_vec);
boost::shared_ptr<caffe::Blob<float>> fc8 = net->blob_by_name("fc8");
int test_num = 0;
while (test_num < 2622)
{
test_vector.push_back(fc8->data_at(0, test_num++, 1, 1));
}
return test_vector;
}=============注意上面这个地方可以这么改:==============
(直接可以知道这个向量的首地址、尾地址,我们直接用其来定义vector)
float* begin = nullptr;
float* end = nullptr;
begin = fc8->mutable_cpu_data();
end = begin + fc8->channels();
CHECK(begin != nullptr);
CHECK(end != nullptr);
std::vector<float> FaceVector{ begin,end };
return std::move(FaceVector);请特别注意这个地方:
namespace caffe
{
extern INSTANTIATE_CLASS(InputLayer);
extern INSTANTIATE_CLASS(InnerProductLayer);
extern INSTANTIATE_CLASS(DropoutLayer);
extern INSTANTIATE_CLASS(ConvolutionLayer);
REGISTER_LAYER_CLASS(Convolution);
extern INSTANTIATE_CLASS(ReLULayer);
REGISTER_LAYER_CLASS(ReLU);
extern INSTANTIATE_CLASS(PoolingLayer);
REGISTER_LAYER_CLASS(Pooling);
extern INSTANTIATE_CLASS(LRNLayer);
REGISTER_LAYER_CLASS(LRN);
extern INSTANTIATE_CLASS(SoftmaxLayer);
REGISTER_LAYER_CLASS(Softmax);
extern INSTANTIATE_CLASS(MemoryDataLayer);
}为什么要加这些?因为在提取过程中发现,如果不加,会导致有一些层没有注册的情况。我在Github的Microsoft/Caffe上帮一外国哥们解决了这个问题。我把问题展现一下:
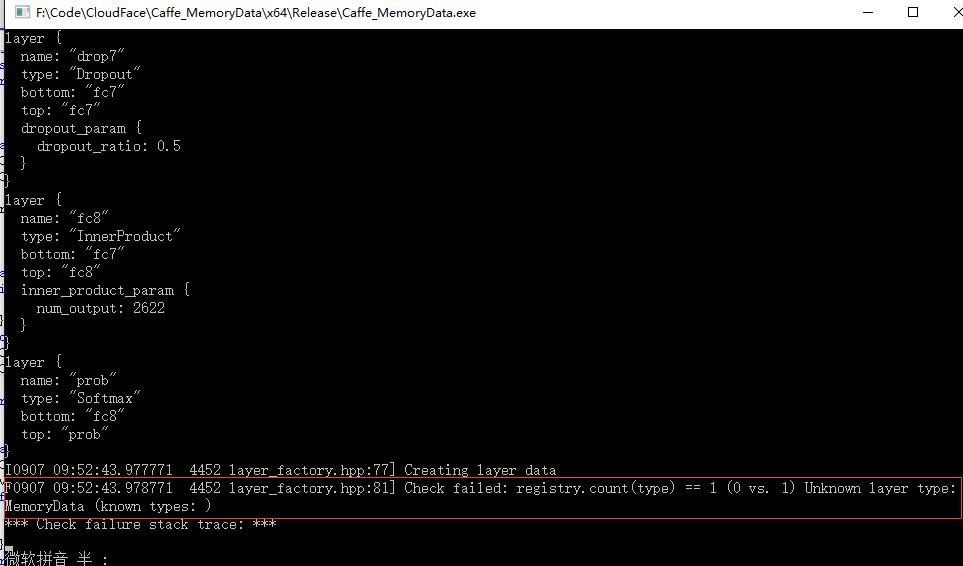
如果我们加了上述代码,就相当于注册了这些层,自然就不会有这样的问题。
在提取过程中,我提取的是fc8层的特征,2622维。当然,最后一层都已经是分类特征了,最好还是提取fc7层的4096维特征。
在这个地方:
void Caffe_Predefine()//when our code begining run must add it
{
caffe::Caffe::set_mode(caffe::Caffe::GPU);
net = Net_Init_Load<float>("vgg_extract_feature_memorydata.prototxt", "VGG_FACE.caffemodel", caffe::TEST);
memory_layer = (caffe::MemoryDataLayer<float> *)net->layers()[0].get();
}是一个初始化的函数,用于将VGG网络模型与提取特征的配置文件进行传入,所以很明显地,在提取特征之前,需要先:
Caffe_Predefine();进行了这个之后,这些全局量我们就能一直用了。
我们可以试试提取特征的这个接口。新建一个main.cpp,调用之:
#include <ExtractFeature_.h>
int main()
{
Caffe_Predefine();
Mat lena = imread("lena.jpg");
if (!lena.empty())
{
ExtractFeature(lena);
}
}因为我们得到的是一个vector< float>类型,所以我们可以把它逐一输出出来看看。当然,在ExtractFeature()的函数中你就可以这么做了。我们还是在main()函数里这么做。
来看看:
#include <ExtractFeature_.h>
int main()
{
Caffe_Predefine();
Mat lena = imread("lena.jpg");
if (!lena.empty())
{
int i = 0;
vector<float> print=ExtractFeature(lena);
while (i<print.size())
{
cout << print[i++] << endl;
}
}
imshow("Extract feature",lena);
waitKey(0);
}那么对于这张图片,提取出的特征,就是很多的这些数字:
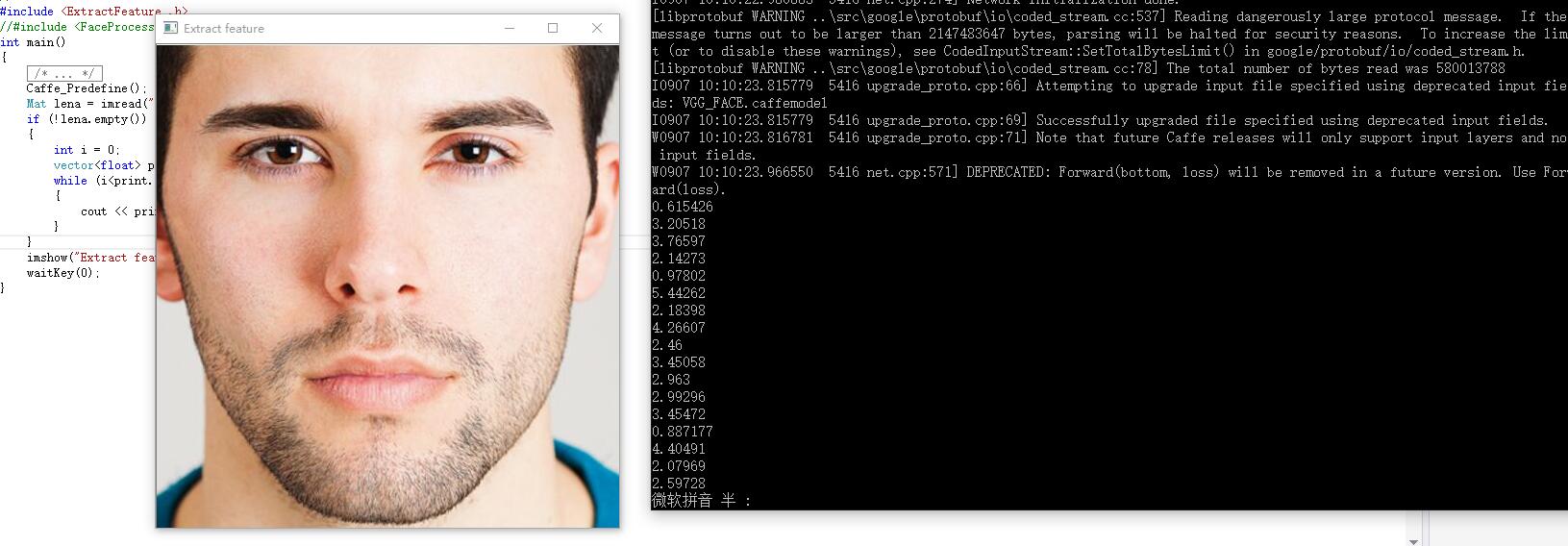
提取一张224*224图片特征的时间为:0.019s。我们可以看到,GPU加速的效果是非常明显的。而且我这块显卡也就是GTX980。不知道泰坦X的提取速度如何(泪)。
附:net结构 (prototxt),注意layer和layers的区别:
name: "VGG_FACE_16_layer"
layer {
name: "data"
type: "MemoryData"
top: "data"
top: "label"
transform_param {
mirror: false
crop_size: 224
mean_value:129.1863
mean_value:104.7624
mean_value:93.5940
}
memory_data_param {
batch_size: 1
channels:3
height:224
width:224
}
}
layer {
bottom: "data"
top: "conv1_1"
name: "conv1_1"
type: "Convolution"
convolution_param {
num_output: 64
pad: 1
kernel_size: 3
}
}
layer {
bottom: "conv1_1"
top: "conv1_1"
name: "relu1_1"
type: "ReLU"
}
layer {
bottom: "conv1_1"
top: "conv1_2"
name: "conv1_2"
type: "Convolution"
convolution_param {
num_output: 64
pad: 1
kernel_size: 3
}
}
layer {
bottom: "conv1_2"
top: "conv1_2"
name: "relu1_2"
type: "ReLU"
}
layer {
bottom: "conv1_2"
top: "pool1"
name: "pool1"
type: "Pooling"
pooling_param {
pool: MAX
kernel_size: 2
stride: 2
}
}
layer {
bottom: "pool1"
top: "conv2_1"
name: "conv2_1"
type: "Convolution"
convolution_param {
num_output: 128
pad: 1
kernel_size: 3
}
}
layer {
bottom: "conv2_1"
top: "conv2_1"
name: "relu2_1"
type: "ReLU"
}
layer {
bottom: "conv2_1"
top: "conv2_2"
name: "conv2_2"
type: "Convolution"
convolution_param {
num_output: 128
pad: 1
kernel_size: 3
}
}
layer {
bottom: "conv2_2"
top: "conv2_2"
name: "relu2_2"
type: "ReLU"
}
layer {
bottom: "conv2_2"
top: "pool2"
name: "pool2"
type: "Pooling"
pooling_param {
pool: MAX
kernel_size: 2
stride: 2
}
}
layer {
bottom: "pool2"
top: "conv3_1"
name: "conv3_1"
type: "Convolution"
convolution_param {
num_output: 256
pad: 1
kernel_size: 3
}
}
layer {
bottom: "conv3_1"
top: "conv3_1"
name: "relu3_1"
type: "ReLU"
}
layer {
bottom: "conv3_1"
top: "conv3_2"
name: "conv3_2"
type: "Convolution"
convolution_param {
num_output: 256
pad: 1
kernel_size: 3
}
}
layer {
bottom: "conv3_2"
top: "conv3_2"
name: "relu3_2"
type: "ReLU"
}
layer {
bottom: "conv3_2"
top: "conv3_3"
name: "conv3_3"
type: "Convolution"
convolution_param {
num_output: 256
pad: 1
kernel_size: 3
}
}
layer {
bottom: "conv3_3"
top: "conv3_3"
name: "relu3_3"
type: "ReLU"
}
layer {
bottom: "conv3_3"
top: "pool3"
name: "pool3"
type: "Pooling"
pooling_param {
pool: MAX
kernel_size: 2
stride: 2
}
}
layer {
bottom: "pool3"
top: "conv4_1"
name: "conv4_1"
type: "Convolution"
convolution_param {
num_output: 512
pad: 1
kernel_size: 3
}
}
layer {
bottom: "conv4_1"
top: "conv4_1"
name: "relu4_1"
type: "ReLU"
}
layer {
bottom: "conv4_1"
top: "conv4_2"
name: "conv4_2"
type: "Convolution"
convolution_param {
num_output: 512
pad: 1
kernel_size: 3
}
}
layer {
bottom: "conv4_2"
top: "conv4_2"
name: "relu4_2"
type: "ReLU"
}
layer {
bottom: "conv4_2"
top: "conv4_3"
name: "conv4_3"
type: "Convolution"
convolution_param {
num_output: 512
pad: 1
kernel_size: 3
}
}
layer {
bottom: "conv4_3"
top: "conv4_3"
name: "relu4_3"
type: "ReLU"
}
layer {
bottom: "conv4_3"
top: "pool4"
name: "pool4"
type: "Pooling"
pooling_param {
pool: MAX
kernel_size: 2
stride: 2
}
}
layer {
bottom: "pool4"
top: "conv5_1"
name: "conv5_1"
type: "Convolution"
convolution_param {
num_output: 512
pad: 1
kernel_size: 3
}
}
layer {
bottom: "conv5_1"
top: "conv5_1"
name: "relu5_1"
type: "ReLU"
}
layer {
bottom: "conv5_1"
top: "conv5_2"
name: "conv5_2"
type: "Convolution"
convolution_param {
num_output: 512
pad: 1
kernel_size: 3
}
}
layer {
bottom: "conv5_2"
top: "conv5_2"
name: "relu5_2"
type: "ReLU"
}
layer {
bottom: "conv5_2"
top: "conv5_3"
name: "conv5_3"
type: "Convolution"
convolution_param {
num_output: 512
pad: 1
kernel_size: 3
}
}
layer {
bottom: "conv5_3"
top: "conv5_3"
name: "relu5_3"
type: "ReLU"
}
layer {
bottom: "conv5_3"
top: "pool5"
name: "pool5"
type: "Pooling"
pooling_param {
pool: MAX
kernel_size: 2
stride: 2
}
}
layer {
bottom: "pool5"
top: "fc6"
name: "fc6"
type: "InnerProduct"
inner_product_param {
num_output: 4096
}
}
layer {
bottom: "fc6"
top: "fc6"
name: "relu6"
type: "ReLU"
}
layer {
bottom: "fc6"
top: "fc6"
name: "drop6"
type: "Dropout"
dropout_param {
dropout_ratio: 0.5
}
}
layer {
bottom: "fc6"
top: "fc7"
name: "fc7"
type: "InnerProduct"
inner_product_param {
num_output: 4096
}
}
layer {
bottom: "fc7"
top: "fc7"
name: "relu7"
type: "ReLU"
}
layer {
bottom: "fc7"
top: "fc7"
name: "drop7"
type: "Dropout"
dropout_param {
dropout_ratio: 0.5
}
}
layer {
bottom: "fc7"
top: "fc8"
name: "fc8"
type: "InnerProduct"
inner_product_param {
num_output: 2622
}
}
layer {
bottom: "fc8"
top: "prob"
name: "prob"
type: "Softmax"
}
=================================================================
基于深度学习的人脸识别系统系列(Caffe+OpenCV+Dlib)——【三】使用Caffe的MemoryData层与VGG网络模型提取Mat的特征 完结,如果在代码过程中出现了任何问题,直接在博客下留言即可,共同交流学习。
基于深度学习的人脸识别系统(Caffe+OpenCV+Dlib)【三】VGG网络进行特征提取的更多相关文章
- 基于深度学习的人脸识别系统(Caffe+OpenCV+Dlib)【一】如何配置caffe属性表
前言 基于深度学习的人脸识别系统,一共用到了5个开源库:OpenCV(计算机视觉库).Caffe(深度学习库).Dlib(机器学习库).libfacedetection(人脸检测库).cudnn(gp ...
- 基于深度学习的人脸识别系统(Caffe+OpenCV+Dlib)【二】人脸预处理
前言 基于深度学习的人脸识别系统,一共用到了5个开源库:OpenCV(计算机视觉库).Caffe(深度学习库).Dlib(机器学习库).libfacedetection(人脸检测库).cudnn(gp ...
- 基于深度学习的人脸识别系统系列(Caffe+OpenCV+Dlib)——【四】使用CUBLAS加速计算人脸向量的余弦距离
前言 基于深度学习的人脸识别系统,一共用到了5个开源库:OpenCV(计算机视觉库).Caffe(深度学习库).Dlib(机器学习库).libfacedetection(人脸检测库).cudnn(gp ...
- 基于深度学习的人脸识别系统Win10 环境安装与配置(python+opencv+tensorflow)
一.需要下载的软件.环境及文件 (由于之前见识短浅,对Anaconda这个工具不了解,所以需要对安装过程做出改变:就是Python3.7.2的下载安装是可选的,因为Anaconda已经为我们解决Pyt ...
- 基于深度学习的人脸性别识别系统(含UI界面,Python代码)
摘要:人脸性别识别是人脸识别领域的一个热门方向,本文详细介绍基于深度学习的人脸性别识别系统,在介绍算法原理的同时,给出Python的实现代码以及PyQt的UI界面.在界面中可以选择人脸图片.视频进行检 ...
- 基于深度学习的中文语音识别系统框架(pluse)
目录 声学模型 GRU-CTC DFCNN DFSMN 语言模型 n-gram CBHG 数据集 本文搭建一个完整的中文语音识别系统,包括声学模型和语言模型,能够将输入的音频信号识别为汉字. 声学模型 ...
- 【OCR技术系列之四】基于深度学习的文字识别(3755个汉字)
上一篇提到文字数据集的合成,现在我们手头上已经得到了3755个汉字(一级字库)的印刷体图像数据集,我们可以利用它们进行接下来的3755个汉字的识别系统的搭建.用深度学习做文字识别,用的网络当然是CNN ...
- 【OCR技术系列之四】基于深度学习的文字识别
上一篇提到文字数据集的合成,现在我们手头上已经得到了3755个汉字(一级字库)的印刷体图像数据集,我们可以利用它们进行接下来的3755个汉字的识别系统的搭建.用深度学习做文字识别,用的网络当然是CNN ...
- 基于深度学习的回声消除系统与Pytorch实现
文章作者:凌逆战 文章代码(pytorch实现):https://github.com/LXP-Never/AEC_DeepModel 文章地址(转载请指明出处):https://www.cnblog ...
随机推荐
- Java io流的学习
近期几天细致学了Java的io流.本来是打算看视频通过视频来学习的.但是后来发现事实上视频看不怎么懂也感觉不是非常easy上手,所以就通过百度和api文档学习了Java的io流 io流能够有两个分类, ...
- javafx style and cssFile
public class EffectTest extends Application { public static void main(String[] args) { launch(args); ...
- logwatch日志监控
1. 介绍 在维护Linux服务器时,经常需要查看系统中各种服务的日志,以检查服务器的运行状态. 如登陆历史.邮件.软件安装等日志.系统管理员一个个去检查会十分不方便:且大多时候,这会是一种被动的检查 ...
- 一个简单RPC框架是怎样炼成的(II)——制定RPC消息
开局篇我们说了,RPC框架的四个核心内容 RPC数据的传输. RPC消息 协议 RPC服务注冊 RPC消息处理 以下,我们先看一个普通的过程调用 class Client(object): def _ ...
- 关于client浏览器界面文字内容溢出用省略号表示方法
在实际的项目中,因为client浏览器文字内容的长度不确定性和页面布局的固定性,难免会出现文字内容超过div(或其它标签,下同)区域的情况.此时比較好的做法就是当文字超过限定的div宽度后自己主动以省 ...
- Maven和Ant的差别
近期做的项目中一直是在使用maven.可是要知道最早出来的构建工具是Ant,如今Ant依旧有好多人再用.于是自己就抽出来时间.学习了一下Ant的主要的使用.这样也能跟好的理解Maven提供的新特性. ...
- python实现获取文件列表中每一个文件keyword
功能描写叙述: 获取某个路径下的全部文件,提取出每一个文件里出现频率最高的前300个字.保存在数据库其中. 前提.你须要配置好nltk #!/usr/bin/python #coding=utf-8 ...
- 判断移动端跳转,从移动端来的不跳转。利用localStorage保存状态,window.location.pathname跳转不同的url
手机访问 www.yourdomain.com 跳转,从m.yourdomain.com来的不跳转. 访问www.yourdomain.com/category8, 跳转到m.yourdomain.c ...
- Node.js安装+环境配置【Windows版】
Node.js安装及环境配置之Windows篇 一.安装环境 1.本机系统:Windows 10 Pro(64位)2.Node.js:v6.9.2LTS(64位) 二.安装Node.js步骤 1.下 ...
- Linux中删除文件,磁盘空间未释放问题追踪
在客户使用我们产品后,发现一个问题:在删除了文件后.磁盘空间却没有释放.是有进程在打开这个文件,还是其它情况?我们一起来看看一下两个场景 一. 场景一:进程打开此文件 当一个文件正在被一个进程使用时. ...