Method for finding shortest path to destination in traffic network using Dijkstra algorithm or Floyd-warshall algorithm
A method is presented for finding a shortest path from a starting place to a destination place in a traffic network including one or more turn restrictions, one or more U-turns and one or more P-turns using a Dijkstra algorithm. The method as sets a virtual arc between nodes, and assigns a virtual arc value. A smallest travel time value is selected out of total travel time values for all nodes except for the starting node, by considering existing arcs between nodes and the virtual arc and assigning the smallest travel time value to a permanent label node. The shortest path is determined by tracing the permanent nodes starting from the destination node.
FIELD OF THE INVENTION
This invention relates to a method for finding a shortest path and a computer-readable record media storing instructions for performing the method; and more particularly, to a method for finding a shortest path in a traffic network using a Dijkstra algorithm and a Floyd-warshall algorithm and a computer-readable record media storing instructions for performing the method.
DESCRIPTION OF THE PRIOR ART
A Dijkstra algorithm and a Floyd-warshall algorithm are ones, which are frequently used for finding a shortest path.
The conventional Dijkstra algorithm makes it possible to find a shortest travel time value from a starting node to all other nodes in a network with nonnegative arc values. According to this algorithm, all nodes are classified into two groups of node. One is a permanent node that represents a shortest travel time value from a starting node to a relevant node. The other one is a temporary node that represents an upper bound of a real shortest travel time value from the starting node to the relevant node. Also, a label of a node refers to a shortest travel time value from the starting node along a path whose internal nodes are all permanently labeled. Initially, the starting node is labeled with the permanent node whose travel time value is zero.
According to the Dijkstra algorithm, a node having a minimum temporary label is selected to thereby become the permanent node. The Dijkstra algorithm terminates when all nodes including from the relevant node to neighboring nodes become the permanent node.
The Floyd-warshall algorithm makes it possible to find a shortest path between all pairs of nodes in a network.
According to the Floyd-warshall algorithm, a matrix of πij is computed. The πijdenotes a travel time value for each of all pairs of nodes, i and j. A πij (m)denotes a matrix of a shortest travel time value from the node i and to the node j using 1, 2, . . . , m−1 as the internal node. A πij (k) denotes a matrix of a travel time value for each of all pairs of nodes i and j within a starting node and an arrival node. A πij (k+1) is computed based on the πij (k). Here, a Triple operation needs to be performed in order to compute the πij (k+1).
FIG. 7 shows one embodiment of a Triple operation according to a Floyd-warshall algorithm.

Here, it is supposed that a πij (m) denotes a matrix for a shortest travel time value from the node i and to the node j using 1, 2, . . . , m−1 as an internal node. A πij (k+1) is generated by calculating a given πij (k) on a following Triple operation.
That is to say, as for a shortest travel time using nodes 1, 2, . . . , k as an internal node, if πij (k)<πik (k)+πkj (k), πij (k)=πij (k+1) without passing a node k, however if πij (k)>πik (k)+πkj (k), πij (k)=πik (k)+πkj (k) with passing the node k.
When representing the above by a mathematical equation, the equation is as follows:
πij (k+1)=min {πij (k), πik (k)+πkj (k)}
In other words, a less one of πij (k) and πik (k)+πkj (k) is assigned to πij (k+1).
As described above, the conventional Dijkstra algorithm and Floyd-warshall algorithm are used to find a shortest path, however there is a problem that the same node should not be passed twice. Also, there is another problem that the above two algorithm cannot be applied to a real traffic network, in which a Left-turn restriction, a U-turn and a P-turn are included.
SUMMARY OF THE INVENTION
It is an object of the present invention to provide a method for finding a shortest path from a starting place to a destination place in a traffic network to thereby reach the destination place in shorter time.
In accordance with an aspect of the present invention, there is provided a method for finding a shortest path from a starting place to a destination place in a traffic network including one or more turn restrictions, one or more U-turns and one or more P-turns using a Dijkstra algorithm, the method including the steps of: assigning a virtual arc connection value from a starting node to a destination node based on traffic information in order to do the turn restriction, the U-turn and the P-turn, wherein the starting node indicates the starting place and the destination node indicates the destination place; selecting a smallest travel time value out of total travel time value for a temporary label node from the starting node to all nodes except for the starting node and assigning the smallest travel time value to a permanent label node; and determining the shortest path by tracing a permanent node stating from the destination node.
DETAILED DESCRIPTION OF THE PREFERRED EMBODIMENTS
FIG. 1 shows a configuration of a DRGS (dynamic route guidance system) in accordance with the present invention.
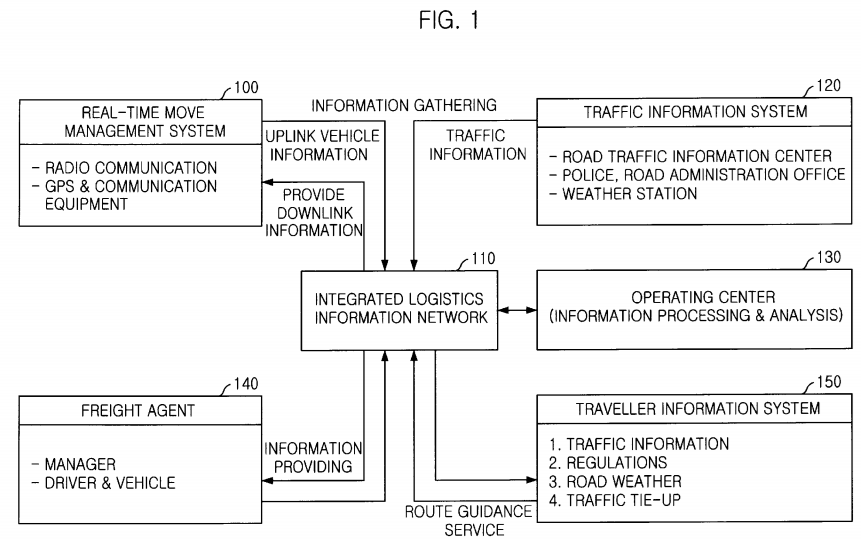
Reference numerals 100, 110, 120, 130, 140 and 150 denote respectively a real-time movement management system, an integrated logistics information network (ILIN), traffic information system, an operation center, a freight carrier and a traveler information system.
The traffic information system 120 includes, as a traffic information source, police, a road administrator, road traffic information center or the like. The freight carrier 140 includes a vehicle having an OBU (on board unit). Each vehicle can find a desired location using the equipment for the GPS and an operator of the freight carrier can perform monitoring information about a location of the freight and the vehicle, a travel time, a vehicle status, some freight loaded on a specific vehicle using the same.
The real-time movement management system 100, the traffic information system 120, the operation center 130, the freight carrier 140 and the traveler information system 150 are all coupled with one another through the integrated logistics information network (ILIN) 110.
The DRGS performs guiding a vehicle to an appropriate route, wherein a driver can escape from a traffic congestion to thereby reach his/her destination earlier. Accordingly, a traffic flow can be smooth and vehicle movement efficiency can be increased.
The DRGS needs to estimate a travel time along each path between crossroads and the estimation is based on data that are measured at each of a variety of time slots in the past time, wherein the data are collected using equipment for a GPS (global positioning system). In other words, the travel time estimation for next minutes is required because the traffic flow varies with short time. Also, when this estimation is compared with a next estimation for a traffic variable, it is possible to perform a proper traffic signal control and find an optimal route according to a status of the traffic flow.
As shown in FIG. 1, the real-time movement management system (RTMMS) 100 provides the operation center 130 with a vehicle location, a travel time, vehicle information or the like via an uplink and receives traffic information such as a new shortest path corresponding to a current traffic status via a downlink.
The traffic information system 120 receives information about an overall traffic from the road traffic information center, the police, the road administrator, a weather station or the like and provides the operation center 130 with the information.
The freight carrier 140 provides the operation center 130 with information about a location of the freight and the vehicle, the travel time, a vehicle status, some freight loaded on a specific vehicle or the like via the integrated logistics information network (ILIN) 110 and receives information analyzed in the operation center 130 via the same.
The traveler information system 150 provides the operation center 130 with information related to a route guidance service, for example, traffic information, regulations, a weather in the road and a traffic congestion via the integrated logistics information network (ILIN) 110 and receives information analyzed in the operation center 130 via the same.
FIG. 2 shows a configuration of a traffic network including a turn-restriction.
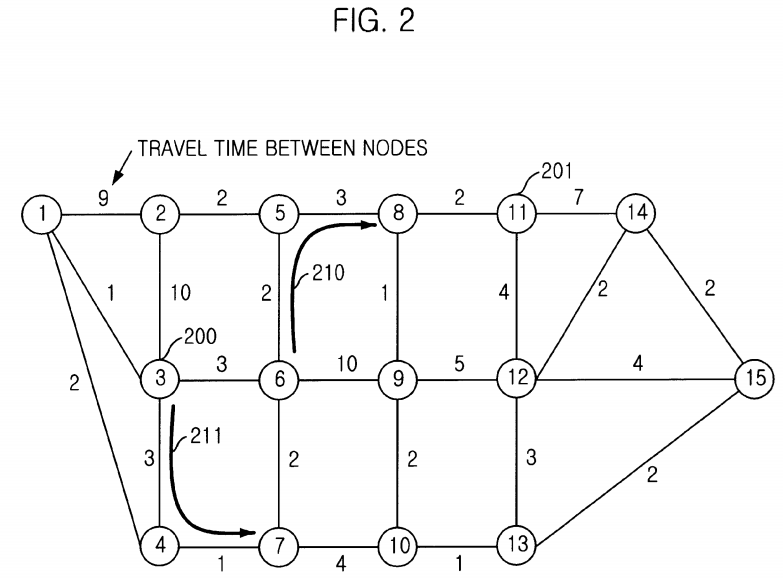
As shown in FIG. 2, a value on a corresponding path across two nodes represents a travel time value from one node to the other node. The Dijkstra algorithm in accordance with the present invention uses continuous three nodes including a previous permanent node, a current permanent node and a temporary node adjacent to the current permanent node in order to exclude the turn-restriction in the course of finding a shortest path. In other words, if a path along some continuous three nodes is identical to the turn-restriction path, the path cannot be the shortest path.
For example, it is assumed that a vehicle is going to travel from a starting node (3) 200 to a destination node (11) 201. If there are turn-restriction paths including a path 210 along nodes 6-5-8 and a path 211 along nodes 3-4-7, a shortest path is a path along nodes 3-6-7-10-9-8-11 and an optimal total travel time along the shortest path is 14, wherein 14 equals a sum of travel times on each path, that is, 3+2+4+2+1+2. Consequently, the turn-restriction paths including the path 210 along nodes 6-5-8 and the path 211 along nodes 3-4-7 cannot be paths as a comparison object in order to find a shortest path.
FIG. 3 is a configuration of a traffic network including a turn-restriction and a U-turn.
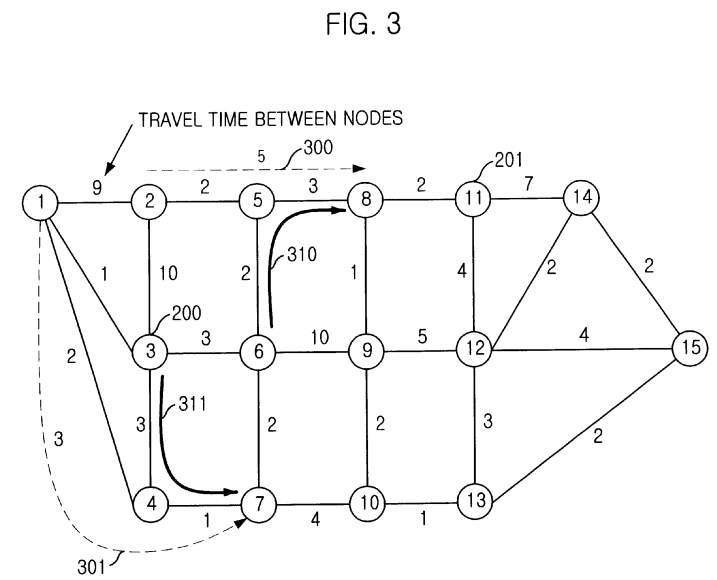
An improved Dijkstra algorithm in accordance with the present invention is applied to the traffic network in FIG. 3.
A virtual arc connection is used in consideration of the U-turn in applying the improved Dijkstra algorithm to the traffic network.
As shown in FIG. 3, each value between nodes represents a travel time value from one node to the other node and the traffic network includes two turn-restriction paths including a path 310 along nodes 6-5-8 and a path 311 along nodes 3-4-7. It is possible for a driver to do a U-turn along nodes 6-5-2-5-8 in order to travel from a node 6 to a node 8 and a U-turn along nodes 3-4-1-4-7 in order to travel from a node 3 to a node 7.
For the above two U-turns, the driver should pass the nodes 5 and 4 one more time, which the driver already passed. However, the U-turn cannot be used in the Dijkstra algorithm because the Dijkstra algorithm doesn't consider the U-turn path containing a node passed twice.
In accordance with the present invention, virtual arcs including a path 300 from a node 2 to a node 8 and a path 301 from a node 1 to a node 7 and virtual arc values (the virtual arc value=travel time) including a value of 5 for the path 300 and a value of 3 for the path 301 wherein 5=2+3 and 3=2+1, are used to find a shortest path according to the improved Dijkstra algorithm.
If each of the two virtual arc values 5 or 3 is respectively less than each of existing values from the node 2 to the node 8 or from the node 1 to the node 7, each virtual arc value is used to find the shortest path. Otherwise, each existing value is used to find the shortest path instead of the virtual arc value.
FIG. 4 is a configuration of a traffic network including a turn-restriction, a P-turn and a U-turn to which a Diijkstra algorithm is applied.
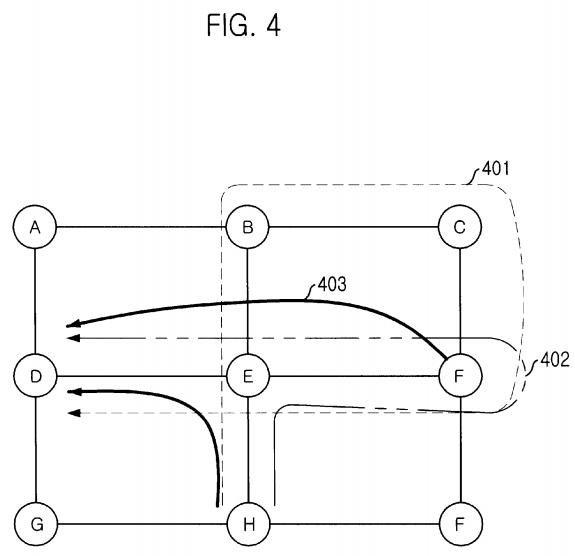
As shown in FIG. 4, a P-turn path 401 is formed along nodes H-E-B-C-F-E-D and a U-turn path 402 is formed along nodes H-E-F-E-D.
A virtual arc 403 from a node F to a node D is used to find a shortest path, wherein a node E is in the center of the virtual arc 403.
If there exists already an arc from the node F to the node D in the traffic network, a following consideration needs to be taken into. If a virtual arc value from the node F to the node D is less than an existing arc value, the virtual arc value is used to find the shortest path. In other words, if the travel time of the path from the node F to the node D via the node E is shorter than that of the other paths from the node F to the node D, the path 403 is selected to find the shortest path.
FIGS. 5A and 5B are flow charts illustrating one embodiment of an improved Dijkstra algorithm in accordance with the present invention.

As shown in FIGS. 5A and 5B, at the step S501, a starting node and a destination node are selected in a traffic network.
At the step S502, it is performed to assign a virtual arc value based on traffic information for a U-turn. In this case, if there exists already an arc in the traffic network, followings should be considered. Comparing the virtual arc value with an existing arc value, if the virtual arc value is less than an existing arc value, the virtual arc value is used to find a short path. Otherwise, the existing arc value is used.
At the step S503, it is performed to assign a d1j to a πj b. Here, the d1j represents a travel time value from a starting node, usually a node 1 to a node j. The πj b represents a total travel time of a temporary label node from the starting node to the node j.
At the step S504, it is performed to assign the starting node 1 to a b and if there exists no arc between the starting node 1and the node j, d1j=∞ (an infinite value). Here, the b represents a previous permanent node for the node j that is a temporary label node.
At the step S505, it is performed to assign 0 to a π1*.
A πj* represents an optimal total travel time value from the starting node to the node j. Accordingly, the π1* represents a total travel time value from the starting node to the node 1.
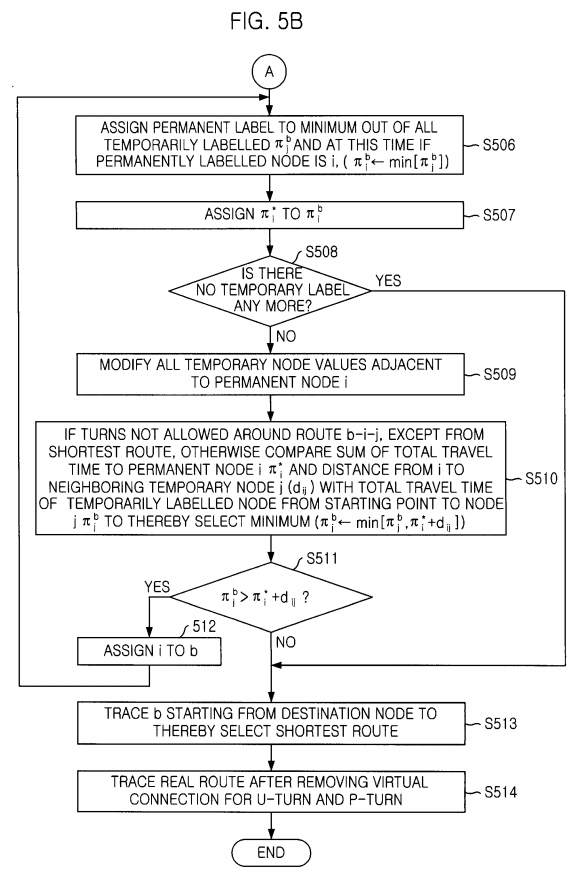
At the step S506, it is performed to select a shortest travel time for every temporary label πj b assign a permanent label to the same. If a permanent label node is an i, a minimum value (min [πj b]) out of the total travel time of a temporary label node from the starting node to the node j (πj b) is selected to thereby be designated as a πi b.
At the step S507, it is performed to assign the πi b to a πi*. The πi* represents a total travel time value from the starting node to the node i.
At the step S508, it is performed determine if there exists no more temporary label, and if not, the logic flow proceeds to step S513, otherwise proceeds to step S509.
At the step S509, it is performed to modify all temporary nodes adjacent to the permanent node i.
At the step S510, if a path along nodes b-i-j is not the turn-restriction path, it is performed to compare the total travel time of the temporary label node from the starting node to the node j (πj b) with a sum of the total travel time value from the starting node to the permanent node i (πi*) and a travel time value from the permanent node i to a temporary node j adjacent to the i (dij) and then as a result of the comparison, select less travel time to thereby assign the less travel time (min [πj b, πi*+dij]) to a new total travel time of the temporary label node from the starting node to the node j (πj b). Here, if the path along nodes b-i-j is the turn-restriction path, the b-i-j path is excluded from the shortest path.
At the step S511, it is performed to determine if the new total travel time of the temporary label node from the starting node to the node j (πj b) is larger than the sum of the total travel time value from the starting node to the permanent node i (πi*) and a travel time value from the permanent node i to a temporary node j adjacent to the i (dij), and if not, the logic flow proceeds to step S513, otherwise proceeds to step S512.
If πj b>πi*+dij, at the step S512, it is performed to assign the previous permanent node i to b for πj b and then the logic flow returns to the step S506.
At the step S513, it is performed to find a shortest path by tracing b representing a previous permanent node for the current permanent node, starting from the destination node.
At the step S514, it is performed to trace an actual path after eliminating a virtual arc for the U-turn and the P-turn.
FIG. 6 is a configuration of a traffic network including a turn-restriction, a U-turn and a P-turn to which a Floyd-warshall algorithm is applied.
According to an improved Floyd-warshall algorithm, in case a turn restriction arc is included in a traffic network, the turn restriction arc is excluded from objects for a shortest path by assigning a significantly large value of a travel time, for example, an infinite value (∞) to the arc.
As shown in FIG. 6, the traffic network includes a Left-turn restriction path 601 along nodes V-L-W, two U-turn paths including a path along nodes V-L-a3-L-W and a path along nodes V-L-a5-L-W and a P-turn path along nodes V-L-a3-a4-a5-L-W. The node L 602 is in the center of the traffic network.
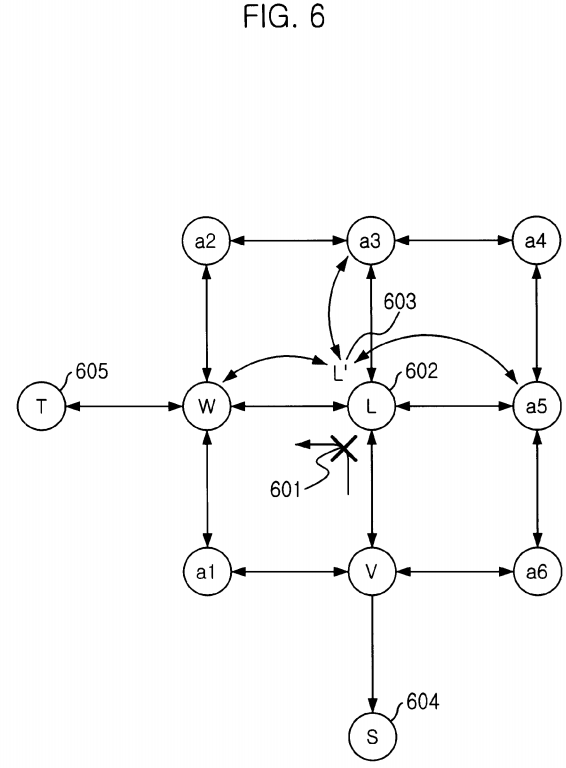
When assuming that a starting node is a node S 604 and a destination node is a node T 605, the Left-turn restriction path601 along the nodes V-L-W needs to be considered.
To find a shortest path, it is required to obtain a first shortest travel time matrix (πij (k)) by considering two paths including a path along nodes V-a6-a5-L-W and a path along nodes V-a6-a5-a4-a3-L-W as if an arc along nodes V-L doesn't exist, that is, πVL (0)=∞ and also to obtain a second shortest travel time matrix (πij (k)) by considering two paths including a path along nodes V-L-a3-a2-W and a path along nodes V-L-a5-a4-a3-a2-W as if an arc along nodes L-W doesn't exist, that is, πLW(0)=∞.
It is required to compare the first shortest travel time matrix (πij (k)) with the second shortest travel time matrix (πij (k)) to find the shortest path in the traffic network including the Left-turn restriction path 601 along the nodes V-L-W.
A major disadvantage on the above approach is that a computation time and a memory capacity are increased 2n times as late and big, wherein the n of the 2n denotes a number of the Left-turn restriction. Accordingly, the improved Floyd-warshall algorithm should be applied to the traffic network including a limited number of the Left-turn restriction.
The U-turn and the P-turn cannot be used to find an optimal path in a conventional shortest path algorithm because the conventional algorithm doesn't consider the U-turn and the P-turn containing a node passed twice.
As shown in FIG. 6, it is required to add a virtual node L′ 603 in the traffic network. Consequently, it is possible to consider the P-turn along the nodes V-L-a3-a4-a5-L′-W and the two U-turns including the path along the nodes V-L-a3-L′-W and the path along the nodes V-L-a5-L′-W, each of which don't pass the same node twice.
Any virtual node can be added in a traffic network including any P-turns or U-turns, wherein a node needs to be in the center of the P-turns or the U-turns.
FIG. 8 is a flow chart illustrating one embodiment of an improved Floyd-warshall algorithm in accordance with the present invention.
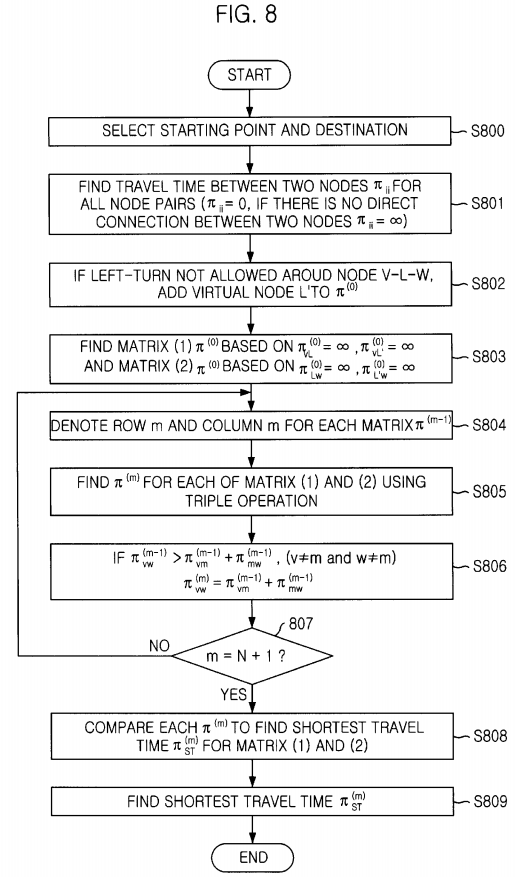
At the step S800, a starting node and a destination node are selected in a traffic network.
At the step S801, it is performed to compute a travel time value between two nodes (πij) for all pairs of nodes. If i=j, a πiiequals 0. That is to say, the travel time value between two nodes (πij) at the same node is 0. Also, if an arc doesn't exist between two nodes, the travel time value between two nodes (πij) equals an infinite value (∞).
At the step S802, if a path along nodes i-L-j is a Left-turn restriction when i=V and j=W, it is performed to add a virtual node L′ in an initialization matrix π(0).
At the step S803, it is performed to compute a first matrix π(0), assuming that πVL (0)=∞, πVL′ (0)=∞ and compute a second matrix π(0), assuming that πLW (0)=∞, πL′W (0)=∞.
At the step S804, it is performed to indicate a row m and a column m in each matrix π(m−1).
At the step S805, it is performed to compute each π(m) for the first matrix and the second matrix using a Triple operation.
At the step S806, if πVW (m−1)>πVm (m−1)+πmW (m−1), (V≠m and W≠m), then πVW (m)=πVm (m−1)+πmW (m−1).
At the step S807, it is performed to determine if the above m equals N+1. The m represents a sum of the number of existing nodes and the number of virtual nodes, and if not, the logic flow returns to the step S804, otherwise proceeds to step S808.
If the above m equals N+1, at the step S808, it is performed to compare each π(m) to find a πST (m). The πST (m)represents a shortest travel time between the starting node S and the destination node T for the first matrix and the second matrix.
At the step S809, it is performed to find the πST (m).
It is possible to store instructions for performing the present invention in accordance with the present invention in a computer-readable record media.
There is an advantageous effect that a driver can reach his/her destination in shorter time along an optimal shortest route in a real-time dynamic route guidance system (DRGS) since techniques of a virtual arc connection, a virtual node or the like are applied to a plurality of road situations of a real traffic network including a turn restriction, a U-turn and a P-turn based on improved Dijkstra algorithm and Floyd-warshall algorithm in accordance with the present invention.
Also, there is another advantageous effect that it is possible to lower a computation time and memory capacity that are required to find a shortest route based on the improved Dijkstra algorithm in accordance with the present invention.
SRC=https://www.google.com.hk/patents/US6564145
Method for finding shortest path to destination in traffic network using Dijkstra algorithm or Floyd-warshall algorithm的更多相关文章
- HDU - 4725 The Shortest Path in Nya Graph 【拆点 + dijkstra】
This is a very easy problem, your task is just calculate el camino mas corto en un grafico, and just ...
- 干货 | 列生成VRPTW子问题ESPPRC( Elementary shortest path problem with resource constraints)介绍附C++代码
00 前言 各位小伙伴大家好,相信大家已经看过前面column generation求解vehicle routing problems的过程详解.该问题中,子问题主要是找到一条reduced cos ...
- Lintcode: Knight Shortest Path
Given a knight in a chessboard (a binary matrix with 0 as empty and 1 as barrier) with a source posi ...
- algorithm@ Shortest Path in Directed Acyclic Graph (O(|V|+|E|) time)
Given a Weighted Directed Acyclic Graph and a source vertex in the graph, find the shortest paths fr ...
- hdu-----(2807)The Shortest Path(矩阵+Floyd)
The Shortest Path Time Limit: 4000/2000 MS (Java/Others) Memory Limit: 32768/32768 K (Java/Others ...
- zoj 2760 How Many Shortest Path 最大流
题目链接:http://acm.zju.edu.cn/onlinejudge/showProblem.do?problemId=1760 Given a weighted directed graph ...
- algorithm@ find the shortest path in a graph using BFS
Finding Shortest Paths By BFS
- The Shortest Path in Nya Graph
Problem Description This is a very easy problem, your task is just calculate el camino mas corto en ...
- hdu 3631 Shortest Path(Floyd)
题目链接:pid=3631" style="font-size:18px">http://acm.hdu.edu.cn/showproblem.php?pid=36 ...
随机推荐
- HDU - 4552 怪盗基德的挑战书 (后缀数组)
Description "在树最漂亮的那天,当时间老人再次把大钟平均分开时,我会降临在灯火之城的金字塔前.带走那最珍贵的笑容."这是怪盗基德盗取巴黎卢浮宫的<蒙娜丽莎的微笑& ...
- 清除浮动.md
清除浮动的三种方法 1 加空div层(.clear) 2 overflow属性设置(.clearo) 3 :after伪元素(.clearfix) <!DOCTYPE html> < ...
- smack capable(CAP_MAC_OVERRIDE)
https://blog.csdn.net/ning_wei/article/details/9670947 LINUX中的capable int smk_curacc(char *obj_label ...
- Nginx 虚拟主机及正向代理设置
添加虚拟主机 # vim /usr/local/nginx-1.9.0/conf/vhost/proxy.conf server { resolver 8.8.8.8; listen ; locat ...
- mysql的入门基础操作
1.数据库的简单介绍 1.1 什么是数据库,就是一个文件系统,使用标准sql对数据库进行操作 1.2 常见的数据库 oracle 是oracle公司的数据库,是一个收费的大型的数据库 DB2,是IB ...
- 31、CMOS摄像头说明
ov7740(摄像头模块) 输入信号: 自然景观等的模拟信号输出信号: RGB.YUV格式的数字信号 1). 常用参数输入信号: 自然景观等的模拟信号输出信号: 输出格式为:RAW RGB.YUV输出 ...
- 代码从windows下visual studio到andriod平台迁移的修改记录
前言 前言也是迁言,从windows的visual studio 2012平台迁移到android平台上,需用修改挺多的代码和需用注意地方. 我们当然的平台当初就考虑了其他平台跨平台的应用问题,所以一 ...
- Python爬虫之路——简单的网页抓图
转载自我自己的博客:http://www.mylonly.com/archives/1401.html 用Python的urllib2库和HTMLParser库写了一个简单的抓图脚本.主要抓的是htt ...
- stm32的ADC规则组通道采样顺序设置
先看一下固件库手册 再看一下手册上的例子: 有两个通道,,并且顺序如下
- 单选框radio改变事件详解(用的jquery的radio的change事件)
单选框radio改变事件详解(用的jquery的radio的change事件) 一.总结 1.用的jquery的radio的change事件:当元素的值发生改变时,会发生 change 事件,radi ...