滤波器算法(1)-卡尔曼滤波小车附带题目与MATLAB程序
1 简介
由卡尔曼这个学者提出的最佳线性滤波器,单纯时域维度即可实现【无需进行频域变换】
2 思路
由上一时刻的最佳估计值XKE_P预测①当前时刻预测值Pxv 与 ②当前时刻的测量值Mxv 进行联立计算获得当 ③前时刻的最佳估计值XKE
3 核心

4 Matlab实例
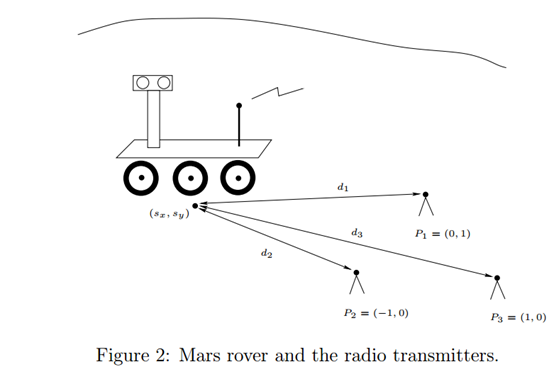
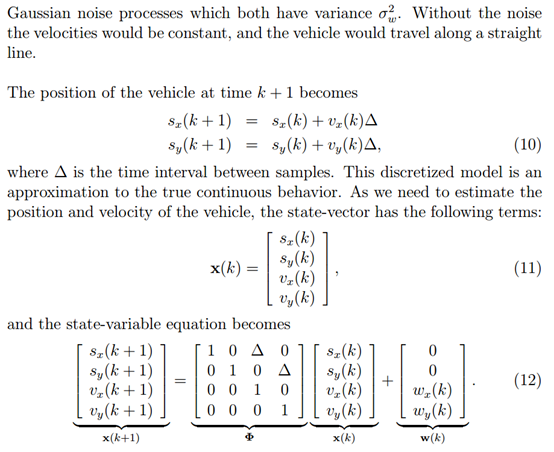
4.1 题目【老师留的课堂作业】
研一的时候做过一次,当时没有总结;最近师弟们在写这个作业花时间重新弄了一遍,做了一次总结

4.2 源代码
不带BU参数
version9_release.m
%% 卡尔曼滤波的发布版本程序
%% 时间:2019.12.05
%% 版本:v9
%% 特性:单参处理【防止多维度计算混乱】
%% TODO:引入多参数进一步优化算法 %% 数据读取
% MDistance=importdata('RoverMeasurementData.txt');
Mxv=importdata('data3.mat'); % 笛卡尔坐标系,测量值
Txv=importdata('RoverTrueStates.txt'); % 真实值
len=size(Mxv,1); %% 参数设置
q=0.010000 ; R=0.500000; Q=[1 0;0 1].*q; %% 正式处理
XKE=zeros(4,len);
for i=1:len
xv = func_kalmanFilter_singleVal(Mxv(i,1),Q,R,i);
XKE(1,i)=xv(1);
XKE(3,i)=xv(2);
end for i=1:len
xv = func_kalmanFilter_singleVal(Mxv(i,2),Q,R,i);
XKE(2,i)=xv(1);
XKE(4,i)=xv(2);
end %% 图谱显示
figure(1);
plot(Txv(1,:),Txv(2,:),'r-*','markersize',8),hold on;
plot(XKE(1,:),XKE(2,:),'b-s','markersize',8),hold on;
plot(Mxv(:,1),Mxv(:,2),'g-v','markersize',8),hold on;
xlabel('位置x');
ylabel('位置y');
legend({'真实值','估计值','测量值'},'Location','northwest');%
set(gca,'FontSize',25); figure(2);
sub_XKE=sqrt((XKE(1,:)-Txv(1,:)).^2+(XKE(2,:)-Txv(2,:)).^2);
sub_Mxv=sqrt((Mxv(:,1)'-Txv(1,:)).^2+(Mxv(:,2)'-Txv(2,:)).^2);
plot(sub_XKE,'b-s','markersize',8),hold on;
plot(sub_Mxv,'g-v','markersize',8),hold on;
xlabel('时间t');
ylabel('与真实值的距离均方差d');
legend({'估计值误差','测量值误差'},'Location','northwest');%
set(gca,'FontSize',25);
% print -djpeg -r600 不带BU位置点;
% print -djpeg -r600 不带BU方差值;
version10_release.m
%% 卡尔曼滤波的发布版本程序
%% 时间:2019.12.05
%% 版本:v9
%% 特性:单参处理【防止多维度计算混乱】
%% TODO:引入多参数进一步优化算法 %% 数据读取
% MDistance=importdata('RoverMeasurementData.txt');
Mxv=importdata('data3.mat'); % 笛卡尔坐标系,测量值
Txv=importdata('RoverTrueStates.txt'); % 真实值 %% 参数设置
MCN=20;
d_range1=0.01;
d_range2=0.01; q=0:d_range1:1;
R=0:d_range2:0.5; len1=size(q,2);
len2=size(R,2); Q=[1 0;0 1]; %% 正式处理
sub_map=zeros(1,len1*len2);
len=len1*len2;
tic;
t1=toc;
% for k=1:len
parfor k=1:len
i=mod(k-1,len1)+1; %行号
j=floor((k-1)/len1)+1; %列号
sub_map(k)=func_kalmanFilter_doubleVal(Mxv,Txv, Q.*q(1,i), R(1,j), MCN);
fprintf('run is going on k=%d,index=(%d, %d)\n',k,i,j);
end
t2=toc;
fprintf('耗时t=%f\n',(t2-t1)); %% 获取当前最优解
sub_min=min(sub_map);
k=find(sub_map==sub_min);
i=mod(k-1,len1)+1; %行号
j=floor((k-1)/len1)+1; %列号
Eq=q(1,i);
ER=R(1,j);
fprintf('当前最优解 q=%f ; R=%f ,sub=%f\n',Eq,ER,sub_min); %% 显示图谱
sub_map=reshape(sub_map,len1,len2);
[X,Y]= meshgrid(q,R);
figure(1); mesh(X',Y',sub_map);
xlabel('Q预测模型噪声');
ylabel('R观测噪声'); %% 最优数值解1
% q=0.017;
% R=3.6;
% sub=32.0530; % 当前最优解 q=0.010000 ; R=0.500000 ,sub=44.573339
带BU参数
version11_release.m
%% 卡尔曼滤波的发布版本程序
%% 时间:2019.12.05
%% 版本:v11
%% 特性:引入加速度参与计算
%% TODO:引入多参数进一步优化算法 %% 数据读取
% MDistance=importdata('RoverMeasurementData.txt');
Mxv=importdata('data3.mat'); % 笛卡尔坐标系,测量值
Txv=importdata('RoverTrueStates.txt'); % 真实值
len=size(Mxv,1); %% 参数设置
% q=0.006000;
% R=1.270000 ;
% q=0.006000 ; R=0.010000 ;
% q=0.030000 ; R=0.050000 ;
% q=0.030000 ; R=0.050000;
q=0.040000 ; R=0.050000;
Q=[1 0;0 1].*q; %% 正式处理
XKE=zeros(4,len);
for i=1:len
xv = func_kalmanFilter_singleVal_withBU(Mxv(i,1),Q,R,i);
XKE(1,i)=xv(1);
XKE(3,i)=xv(2);
end for i=1:len
xv = func_kalmanFilter_singleVal_withBU(Mxv(i,2),Q,R,i);
XKE(2,i)=xv(1);
XKE(4,i)=xv(2);
end %% 图谱显示
figure(1);
plot(Txv(1,:),Txv(2,:),'r-*','markersize',8),hold on;
plot(XKE(1,:),XKE(2,:),'b-s','markersize',8),hold on;
plot(Mxv(:,1),Mxv(:,2),'g-v','markersize',8),hold on;
xlabel('位置x');
ylabel('位置y');
legend({'真实值','估计值','测量值'},'Location','northwest');%
set(gca,'FontSize',25); figure(2);
sub_XKE=sqrt((XKE(1,:)-Txv(1,:)).^2+(XKE(2,:)-Txv(2,:)).^2);
sub_Mxv=sqrt((Mxv(:,1)'-Txv(1,:)).^2+(Mxv(:,2)'-Txv(2,:)).^2);
plot(sub_XKE,'b-s','markersize',8),hold on;
plot(sub_Mxv,'g-v','markersize',8),hold on;
xlabel('时间t');
ylabel('与真实值的距离均方差d');
legend({'估计值误差','测量值误差'},'Location','northwest');%
set(gca,'FontSize',25);
% print -djpeg -r600 带BU位置点;
% print -djpeg -r600 带BU方差值;
version12_release.m
%% 卡尔曼滤波的发布版本程序
%% 时间:2019.12.05
%% 版本:v9
%% 特性:单参处理【防止多维度计算混乱】
%% TODO:引入多参数进一步优化算法 %% 数据读取
% MDistance=importdata('RoverMeasurementData.txt');
Mxv=importdata('data3.mat'); % 笛卡尔坐标系,测量值
Txv=importdata('RoverTrueStates.txt'); % 真实值 %% 参数设置
MCN=20;
d_range1=0.01;
d_range2=0.01; q=0:d_range1:1;
R=0:d_range2:0.5; len1=size(q,2);
len2=size(R,2); Q=[1 0;0 1]; %% 正式处理
sub_map=zeros(1,len1*len2);
len=len1*len2;
tic;
t1=toc;
% for k=1:len
parfor k=1:len
i=mod(k-1,len1)+1; %行号
j=floor((k-1)/len1)+1; %列号
sub_map(k)=func_kalmanFilter_doubleVal_withBU(Mxv,Txv, Q.*q(1,i), R(1,j), MCN);
fprintf('run is going on k=%d,index=(%d, %d)\n',k,i,j);
end
t2=toc;
fprintf('耗时t=%f\n',(t2-t1)); %% 获取当前最优解
sub_min=min(sub_map);
k=find(sub_map==sub_min);
i=mod(k-1,len1)+1; %行号
j=floor((k-1)/len1)+1; %列号
Eq=q(1,i);
ER=R(1,j);
fprintf('当前最优解 q=%f ; R=%f ,sub=%f\n',Eq,ER,sub_min); %% 显示图谱
sub_map=reshape(sub_map,len1,len2);
[X,Y]= meshgrid(q,R);
figure(1); mesh(X',Y',sub_map);
xlabel('Q预测模型噪声');
ylabel('R观测噪声'); %% 最优数值解1
% q=0.017;
% R=3.6;
% sub=32.0530; % 当前最优解 q=0.040000 ; R=0.050000 ,sub=57.511923
func_kalmanFilter_doubleVal
%% 参数比较数据Q、R的数据比较 function [sub_mean] = func_kalmanFilter_doubleVal(Mxv,Txv, Q, R, MCN) sub_cell=zeros(1,MCN);
len=size(Mxv,1);
XKE=zeros(4,len);
for iRun=1:MCN %% 处理数据
for i=1:len
xv = func_kalmanFilter_singleVal(Mxv(i,1),Q,R,i);
XKE(1,i)=xv(1);
XKE(3,i)=xv(2);
end for i=1:len
xv = func_kalmanFilter_singleVal(Mxv(i,2),Q,R,i);
XKE(2,i)=xv(1);
XKE(4,i)=xv(2);
end %% 计算均方差和
sub=sqrt((XKE(1,end-50:end)-Txv(1,end-50:end)).^2+(XKE(2,end-50:end)-Txv(2,end-50:end)).^2);
sub_cell(1,iRun)=sum(sub);
end
sub_mean=mean(sub_cell); end
func_kalmanFilter_singleVal
%% 单参卡尔曼滤波函数 function [XKE] = func_kalmanFilter_singleVal(Z,Q,R,iLoop)
%FUNC_KALMANFILTER_ 此处显示有关此函数的摘要
% 此处显示详细说明
persistent X;
persistent P;
persistent F;
persistent H;
if iLoop==1
X=[0;0];
P=[1 0;0 1];
F=[1 1;0 1];
H=[1 0];
end X_=F*X;
P_=F*P*F'+Q;
K=P_*H'/(H*P_*H'+R);
X=X_+K*(Z-H*X_);
P=(eye(2)-K*H)*P_;
XKE=X;
end
func_kalmanFilter_doubleVal_withBU
%% 参数比较数据Q、R的数据比较 function [sub_mean] = func_kalmanFilter_doubleVal_withBU(Mxv,Txv, Q, R, MCN) sub_cell=zeros(1,MCN);
len=size(Mxv,1);
XKE=zeros(4,len);
for iRun=1:MCN %% 处理数据
for i=1:len
xv = func_kalmanFilter_singleVal_withBU(Mxv(i,1),Q,R,i);
XKE(1,i)=xv(1);
XKE(3,i)=xv(2);
end for i=1:len
xv = func_kalmanFilter_singleVal_withBU(Mxv(i,2),Q,R,i);
XKE(2,i)=xv(1);
XKE(4,i)=xv(2);
end %% 计算均方差和
sub=sqrt((XKE(1,end-50:end)-Txv(1,end-50:end)).^2+(XKE(2,end-50:end)-Txv(2,end-50:end)).^2);
sub_cell(1,iRun)=sum(sub);
end
sub_mean=mean(sub_cell); end
func_kalmanFilter_singleVal_withBU
%% 带加速度参数的卡尔曼滤波器 function [XKE] = func_kalmanFilter_singleVal_withBU(Z,Q,R,iLoop)
%FUNC_KALMANFILTER_SINGLEVAL_WITHBU 此处显示有关此函数的摘要
% 此处显示详细说明
persistent X; % 位置与速度
persistent U; % 加速度
persistent P; % 协方差矩阵
persistent F; % 状态转移矩阵
persistent B; % 状态控制矩阵
persistent H; % 观测矩阵
if iLoop==1
X=[0;0];
U=0;
P=[1 0;0 1];
F=[1 1;0 1];
B=[1./2;1];
H=[1 0];
end X_=F*X+B*U; % ① 状态预测公式
P_=F*P*F'+Q; % ② 噪声协方差传递
K=P_*H'/(H*P_*H'+R); % ③ 卡尔曼系数计算
XK=X;%暂存前一时刻数据
X=X_+K*(Z-H*X_); % ④ 计算最优估计值
P=(eye(2)-K*H)*P_; % ⑤ 噪声协方差矩阵更新
U=X(2,1)-XK(2,1);
XKE=X; end
4.3 结果显示
不带控制参数的位置点数据图谱:
不带控制参数的方差值图谱:
带控制参数的位置点数据图谱:
带控制参数的方差值图谱:
5 总结
性能确实还可以的,里面的难点在于各个矩阵运算以及Q、R参数的设定,这里我是使用随机参数法,广撒网多次蒙特卡洛仿真求均值,最后在这些参数中选择最优的那个解为我的模型参数。
6 相关链接
开源代码:
链接:https://pan.baidu.com/s/1fUM0VmPVabqKv89WUyZmng 提取码:x3zv
参考链接:
https://www.jianshu.com/p/f6ce8943560c?from=singlemessage
https://www.youtube.com/watch?v=2-lu3GNbXM8
滤波器算法(1)-卡尔曼滤波小车附带题目与MATLAB程序的更多相关文章
- 链表算法题二,还原题目,用debug调试搞懂每一道题
文章简述 大家好,本篇是个人的第4篇文章. 承接第3篇文章<开启算法之路,还原题目,用debug调试搞懂每一道题>,本篇文章继续分享关于链表的算法题目. 本篇文章共有5道题目 一,反转链表 ...
- GMM算法的matlab程序
GMM算法的matlab程序 在“GMM算法的matlab程序(初步)”这篇文章中已经用matlab程序对iris数据库进行简单的实现,下面的程序最终的目的是求准确度. 作者:凯鲁嘎吉 - 博客园 h ...
- GMM算法的matlab程序(初步)
GMM算法的matlab程序 在https://www.cnblogs.com/kailugaji/p/9648508.html文章中已经介绍了GMM算法,现在用matlab程序实现它. 作者:凯鲁嘎 ...
- KFCM算法的matlab程序(用FCM初始化聚类中心)
KFCM算法的matlab程序(用FCM初始化聚类中心) 在“聚类——KFCM”这篇文章中已经介绍了KFCM算法,现在用matlab程序对iris数据库进行实现,用FCM初始化聚类中心,并求其准确度与 ...
- KFCM算法的matlab程序
KFCM算法的matlab程序 在“聚类——KFCM”这篇文章中已经介绍了KFCM算法,现在用matlab程序对iris数据库进行简单的实现,并求其准确度. 作者:凯鲁嘎吉 - 博客园 http:// ...
- FCM算法的matlab程序2
FCM算法的matlab程序2 在“FCM算法的matlab程序”这篇文章中已经用matlab程序对iris数据库进行实现,并求解准确度.下面的程序是另一种方法,是最常用的方法:先初始化聚类中心,在进 ...
- FCM算法的matlab程序
FCM算法的matlab程序 在“FCM算法的matlab程序(初步)”这篇文章中已经用matlab程序对iris数据库进行简单的实现,下面的程序最终的目的是求准确度. 作者:凯鲁嘎吉 - 博客园 h ...
- K-means算法的matlab程序
K-means算法的matlab程序 在“K-means算法的matlab程序(初步)”这篇文章中已经用matlab程序对iris数据库进行简单的实现,下面的程序最终的目的是求准确度. 作者:凯鲁嘎吉 ...
- FCM算法的matlab程序(初步)
FCM算法的matlab程序 在https://www.cnblogs.com/kailugaji/p/9648430.html文章中已经介绍了FCM算法,现在用matlab程序实现它. 作者:凯鲁嘎 ...
随机推荐
- OGC open geospatial consortium标准服务
数据共享作为GIS行业的基础,是每一位从事GIS相关领域人员必须要了解的知识,而OGC服务作为行业标准,已经被各大GIS厂商广泛应用.究竟什么是OGC呢? OGC全称——开放地理空间信息联盟(Open ...
- 【E2E】Tesseract5+VS2017+win10源码编译攻略
一,记录我目前在win10 X64和VS2017的环境下成功编译Tesseract5.0的方式: 二,记录在VS2017 C++工程中调用Tesseract4.0的方法: 三,记录编译和调用Tesse ...
- flutter DataTable数据表格
数据表显示原始数据集.它们通常出现在桌面企业产品中.DataTable Widget实现这个组件 文档:https://api.flutter.dev/flutter/material/DataTab ...
- 【440】Tweet 元素意义
参考:Tweet Object 参考:Geo Objects 参考:User Object Ref: Place data dictionary Tweet Object Attribut ...
- Eureka 与 zookeeper 的区别、
前言在微服务的开发过程中,如果使用的是 Dubbo 那就必须使用到 Zookeeper ,在使用 Spring Cloud Eureka 时,自然其功能更强大得多.博主也不得不感叹,Spring Cl ...
- 【kubectl 原理】kubectl 命令执行的时候究竟发生了什么(kubectl、apiserver、etcd)
参考: https://www.yangcs.net/posts/what-happens-when-k8s/ 总而言之,kubectl命令执行的时候,先在本地封装请求,然后过kube-apiserv ...
- 使用mysqlslap测试MySQL性能
之前介绍过MySQL的性能测试工具sysbench, 这次介绍一个mysql自带的比较简单的性能测试命令mysqlslap. 下面的指令模拟了1000个进程同事连接mysql,并执行100个查询操作, ...
- [Google] Help employee find the nearest gbike
You are given a campus map with the Google buildings, roads and Google bikes. You have to help the e ...
- 2019年Java面试题基础系列228道(5)
21.存在两个类,B 继承 A,C 继承 B,我们能将 B 转换为C 么?如 C = (C) B: 这属于强制类型转换,如果被转换的B实例不是C类型,会有异常 比如你的ABC分别对应动物,猫,黑猫. ...
- 常见问题:计算机网络/运输层/UDP
几乎不对IP增加其他东西,无连接. 优势 速度快.适合实时. 无连接建立,没有连接时延. 无连接状态. 分组首部开销小.TCP需20字节,UDP仅需8字节. 使用UDP的协议 DNS SNMP RIP ...