【PyTorch v1.1.0文档研习】60分钟快速上手
阅读文档:使用 PyTorch 进行深度学习:60分钟快速入门。
本教程的目标是:
- 总体上理解 PyTorch 的张量库和神经网络
- 训练一个小的神经网络来进行图像分类
PyTorch 是个啥?
这是基于 Python 的科学计算包,其目标是:
- 替换 NumPy,发挥 GPU 的作用
- 一个提供最大灵活性和速度的深度学习研究平台
起步
PyTorch 中的 Tensor 类似于 NumPy 中的 ndarray(这一点类似于 TensorFlow),只不过张量可以充分利用 GPU 来进行加速计算。
from __future__ import print_function
import torch
构建一个 5*3 的矩阵:
x = torch.empty(5, 3)
print(x)
tensor([[7.0976e+22, 1.8515e+28, 4.1988e+07],
[3.0357e+32, 2.7224e+20, 7.7782e+31],
[4.7429e+30, 1.3818e+31, 1.7225e+22],
[1.4602e-19, 1.8617e+25, 1.1835e+22],
[4.3066e+21, 6.3828e+28, 1.4603e-19]])
直接通过数据来构建张量:
x = torch.tensor([5.5, 3])
print(x)
tensor([5.5000, 3.0000])
还可以根据已有张量来创建张量。这个方法会重用输入张量的属性(例如 dtype)。
x = x.new_ones(5, 3, dtype=torch.double) # new_* methods take in sizes
print(x) x = torch.randn_like(x, dtype=torch.float) # override dtype!
print(x) # result has the same size
tensor([[., ., .],
[., ., .],
[., ., .],
[., ., .],
[., ., .]], dtype=torch.float64)
tensor([[ 0.4845, -1.2227, -1.2535],
[ 0.2278, 0.9922, 0.5871],
[-1.8249, 0.6308, 1.0100],
[ 0.0126, 0.0591, -0.6153],
[ 0.1847, -1.8002, 0.7629]])
获取张量的大小:
print(x.size())
torch.Size([, ])
注意:torch.Size 对象实际上是元组,支持所有元组操作。
运算
PyTorch 支持多种运算语法(类似于 TensorFlow),下面我们看看各种加法的运算。
加法语法 1:
y = torch.rand(5, 3)
print(x + y)
tensor([[ 1.2256, -0.4395, -0.4990],
[ 0.4846, 1.7138, 1.0470],
[-1.3466, 0.7643, 1.0811],
[ 0.4865, 0.7320, -0.4655],
[ 0.5111, -1.0667, 1.2088]])
加法语法 2:
print(torch.add(x, y))
tensor([[ 1.2256, -0.4395, -0.4990],
[ 0.4846, 1.7138, 1.0470],
[-1.3466, 0.7643, 1.0811],
[ 0.4865, 0.7320, -0.4655],
[ 0.5111, -1.0667, 1.2088]])
输出张量作为参数的加法:
result = torch.empty(5, 3)
torch.add(x, y, out=result)
print(result)
tensor([[ 1.2256, -0.4395, -0.4990],
[ 0.4846, 1.7138, 1.0470],
[-1.3466, 0.7643, 1.0811],
[ 0.4865, 0.7320, -0.4655],
[ 0.5111, -1.0667, 1.2088]])
就地(in-place)的加法:
y.add_(x)
print(y)
tensor([[ 1.2256, -0.4395, -0.4990],
[ 0.4846, 1.7138, 1.0470],
[-1.3466, 0.7643, 1.0811],
[ 0.4865, 0.7320, -0.4655],
[ 0.5111, -1.0667, 1.2088]])
注意:所有让张量就地发生变化的运算都会在后面加上 _(例如:x.copy_(y)、x.t_())。
随时可以使用类似于 Numpy 的索引操作。
print(x[:, 1])
tensor([-1.2227, 0.9922, 0.6308, 0.0591, -1.8002])
如果需要改变张量的形状,使用 torch.view:
x = torch.randn(4, 4)
y = x.view(16)
z = x.view(-1, 8) # -1 所在的维度通过推断得出
print(x.size(), y.size(), z.size())
torch.Size([, ]) torch.Size([]) torch.Size([, ])
如果张量只有一个元素,可以通过 .item() 直接获取 Python 数值。
x = torch.randn(1)
print(x)
print(x.item())
tensor([0.2206])
0.22063039243221283
Numpy Bridge
PyTorch 张量和 Numpy 数组之间可以很容易地进行转换。
如果 Tensor 运行在 CPU 上,那么 Tensor 和 NumPy 数组可以共享同一内存。改变内存中的数值会同时影响到 Tensor 和 Numpy 数组。
将 Tensor 转换为 NumPy 数组
a = torch.ones(5)
print(a)
b = a.numpy()
print(b)
a.add_(1)
print(a)
print(b)
tensor([., ., ., ., .])
[. . . . .]
tensor([., ., ., ., .])
[. . . . .]
将 NumPy 数组转换为 Tensor
import numpy as np
a = np.ones(5)
b = torch.from_numpy(a)
np.add(a, 1, out=a)
print(a)
print(b)
[. . . . .]
tensor([., ., ., ., .], dtype=torch.float64)
CUDA 张量
使用 .to 方法,张量可以移动到任何设备上(如 CUDA)。
# let us run this cell only if CUDA is available
# We will use ``torch.device`` objects to move tensors in and out of GPU
if torch.cuda.is_available():
device = torch.device('cuda') # 一个 CUDA 设备对象
y = torch.ones_like(x, device=device) # 直接在 GPU 上创建一个张量
x = x.to(device) # 或者使用 .to('cuda')
z = x + y
print(z)
print(z.to('cpu', torch.double)) # to 也可以同时修改 dtype
tensor([-0.0786], device='cuda:0')
tensor([-0.0786], dtype=torch.float64)
AUTOGRAD:自动求导
在所有 PyTorch 的神经网络中,最核心的就是 autograd 包。我们首先简单了解一下它,其后我们会训练一个自己的神经网络。
autograd 包对于张量的运算提供了自动求导功能。
张量
torch.Tensor 是该包的核心类。如果你设定它的属性 .requires_grad 为 True,那么它会追踪张量的所有运算。结束运算时,调用 .backward() 可以自动计算所有的梯度。该张量的梯度会聚合到 .grad 属性中。
如果需要停止追踪,你需要调用 .detach() 将张量对计算历史解绑,避免后续计算的追踪。
除了上面的方法,你还可以把代码块封装在 with torch.no_grad(): 中。这在评估模型时非常有用,因为模型可能会有 require_grad=True 的参数,但是我们并不需要它们的梯度。
自动求导的实现中,还有一个类非常重要:Function。
Tensor 和 Function 相互关联,构建一张非循环的图,这张图编码了完整的计算历史。每个张量有一个 .grad_fn 属性来引用一个创建该张量的 Function。
如果你需要计算导数,可以调用 Tensor 的 .backward() 方法。
创建一个 requires_grad=True 的张量:
x = torch.ones(2, 2, requires_grad=True)
print(x)
tensor([[., .],
[., .]], requires_grad=True)
进行张量运算:
y = x + 2
print(y)
tensor([[., .],
[., .]], grad_fn=<AddBackward0>)
y 是运算的结果,因此它有 grad_fn 属性。
print(y.grad_fn)
<AddBackward0 object at 0x7f3287a29390>
进行更多运算:
z = y * y * 3
out = z.mean() print(z, out)
tensor([[., .],
[., .]], grad_fn=<MulBackward0>) tensor(., grad_fn=<MeanBackward0>)
.requires_grad_(...) 会原地改变当前张量的 requires_grad 标记。
a = torch.randn(2, 2)
a = ((a * 3) / (a - 1))
print(a.requires_grad)
a.requires_grad_(True)
print(a.requires_grad)
b = (a * a).sum()
print(b.grad_fn)
False
True
<SumBackward0 object at 0x7f3287a18908>
梯度
让我们进行后馈操作。由于 out 包含一个标量,out.backward() 等价于 out.backward(torch.tensor(1.))。
out.backward()
打印梯度 d(out)/dx:
print(x)
print(out)
print(x.grad)
tensor([[., .],
[., .]], requires_grad=True)
tensor(., grad_fn=<MeanBackward0>)
tensor([[4.5000, 4.5000],
[4.5000, 4.5000]])
我们来验证一下这个结果。我们计算的梯度是 $\frac{\partial out}{\partial x_i}$,而
$$out = \frac{1}{4}\sum z_{i}$$
并且
$$z_i=3\times y^2=3\times(x+2)^2$$
因此
$$\frac{\partial out}{\partial x_i}=\frac{\partial out}{\partial z_i}\frac{\partial z_i}{\partial x_i}=\frac{1}{4}\times 6(x+2)=\frac{3(x+2)}{2}$$
由于 $x_i=1$,代入可以得到
$$\frac{\partial out}{\partial x_i}|_{i=1}=4.5$$
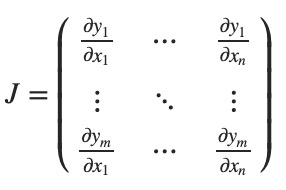
我们在从矩阵的意义上去理解:如果有一个向量函数 $\vec{y}=f(\vec{x})$,那么 $\vec{y}$ 对于 $\vec{x}$ 的梯度是一个 Jacobian 矩阵:
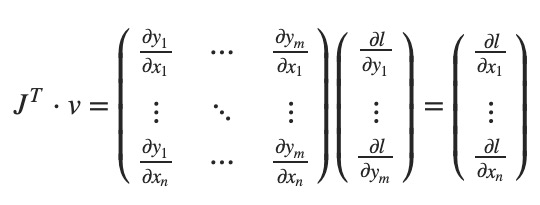
大体上讲,torch.autograd 就是计算向量-Jacobian矩阵的内积的引擎。给定 $v=(v_1, v_2, ..., v_m)^T$,计算内积 $J^Tv$。如果 v 正好是标量函数的梯度 $l=g(\vec y)$,即 $v=(\frac{\partial l}{\partial y_1}, ...,\frac{\partial l}{\partial y_m})^T$,那么这个向量-Jacobian矩阵的内积就等于 $l$ 对于 $\vec x$ 的导数:
下面看一个向量-Jacobian内积的例子:
x = torch.randn(3, requires_grad=True)
y = x * 2
while y.data.norm() < 1000:
y = y * 2 print(y)
tensor([-886.5914, 41.8782, 1542.3958], grad_fn=<MulBackward0>)
现在由于 y 不是标量,torch.autograd 不能直接计算整个 Jacobian 矩阵。但是如果希望求得向量-Jacobian的内积,可以向 backward 传入一个向量参数。
v = torch.tensor([0.1, 1.0, 0.0001], dtype=torch.float)
y.backward(v) print(x.grad)
tensor([4.0960e+02, 4.0960e+03, 4.0960e-01])
可以用 with torch.no_grad(): 来封装代码块:
print(x.requires_grad)
print((x ** 2).requires_grad) with torch.no_grad():
print((x ** 2).requires_grad)
True
True
False
神经网络
我们可以使用 torch.nn 包来构建神经网络。
nn 依赖于 autograd 来定义模型并且对模型求导。nn.Module 包含神经网络层以及一个 forward(input) 方法返回输出。
例如下面分类数字图片的神经网络:
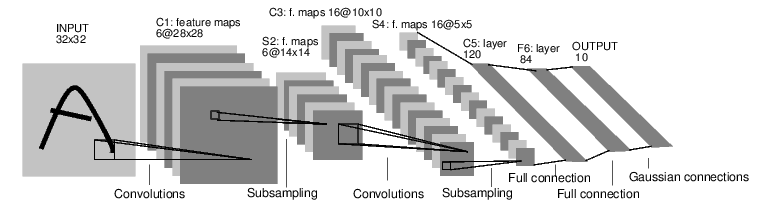
这是一个简单的前馈神经网络。一个神经网络的传统训练方法是:
- 定义含有一些可以学习的参数(或权重)的神经网络。
- 遍历一个输入数据集。
- 将输入向前传入神经网络。
- 计算损失。
- 向后传播梯度到神经网络的参数。
- 更新神经网络的参数,通常使用简单的更新规则: weight = weight - learning_rate * gradient
定义神经网络
import torch
import torch.nn as nn
import torch.nn.functional as F class Net(nn.Module): def __init__(self):
super(Net, self).__init__()
# 1 input image channel, 6 output channels, 3x3 square convolution
# kernel
self.conv1 = nn.Conv2d(1, 6, 3)
self.conv2 = nn.Conv2d(6, 16, 3)
# an affine operation: y = Wx + b
self.fc1 = nn.Linear(16 * 6 * 6, 120) # 6*6 from image dimension
self.fc2 = nn.Linear(120, 84)
self.fc3 = nn.Linear(84, 10) def forward(self, x):
# Max pooling over a (2, 2) window
x = F.max_pool2d(F.relu(self.conv1(x)), (2, 2))
# If the size is a square you can only specify a single number
x = F.max_pool2d(F.relu(self.conv2(x)), 2)
x = x.view(-1, self.num_flat_features(x))
x = F.relu(self.fc1(x))
x = F.relu(self.fc2(x))
x = self.fc3(x)
return x def num_flat_features(self, x):
size = x.size()[1:] # all dimensions except the batch dimension
num_features = 1
for s in size:
num_features *= s
return num_features net = Net()
print(net)
Net(
(conv1): Conv2d(, , kernel_size=(, ), stride=(, ))
(conv2): Conv2d(, , kernel_size=(, ), stride=(, ))
(fc1): Linear(in_features=, out_features=, bias=True)
(fc2): Linear(in_features=, out_features=, bias=True)
(fc3): Linear(in_features=, out_features=, bias=True)
)
这里我们定义了 forward 函数,而 backward 函数(计算梯度)可以使用 autograd 自动定义。
学习好的模型参数可以通过 net.parameters() 返回。
params = list(net.parameters())
print(len(params))
print(params[0].size()) # conv1's .weight
torch.Size([, , , ])
接下来我们尝试随机的 32*32 输入(LeNet 所设置的输入大小是 32*32)。
input = torch.randn(1, 1, 32, 32)
out = net(input)
print(out)
tensor([[-0.0236, -0.0104, 0.0173, -0.1874, -0.0613, -0.0162, -0.1466, 0.1535,
0.0596, -0.0320]], grad_fn=<AddmmBackward>)
在进一步学习之前,这里再回顾一下你看过的类。
- torch.Tensor:支持自动求导运算(backward())的多维数组。同时它也保存着梯度信息。
- nn.Module:神经网络模块。可以很容易地封装参数、放到 GPU 进行运算、导出和加载等。
- nn.Parameter:某种张量,当赋值为 Module 的属性时,可以自动注册为参数。
- autograd.Function:实现自动求导运算的前馈和后馈的定义。每个 Tensor 运算会创建至少一个 Function 节点(创建该 Tensor 的函数)。
到目前为止,我们讲解了:
- 定义一个神经网络
- 处理输入并且调用后馈运算
我们还需要:
- 计算损失(loss)
- 更新神经网络的权重
损失函数
损失函数接收输入的 (output, target) 对,计算出 output 与 target 之间的差值。
在 nn 包中有很多不同的损失函数。 最简单的是 nn.MSELoss,计算出两者的均方误差。
output = net(input)
target = torch.randn(10) # a dummy target, for example
target = target.view(1, -1) # make it the same shape as output
criterion = nn.MSELoss() loss = criterion(output, target)
print(loss)
tensor(0.6006, grad_fn=<MseLossBackward>)
我们可以查看反向传播的各层的运算:
print(loss.grad_fn) # MSELoss
print(loss.grad_fn.next_functions[0][0]) # Linear
print(loss.grad_fn.next_functions[0][0].next_functions[0][0]) # ReLU
<MseLossBackward object at 0x7f3280404588>
<AddmmBackward object at 0x7f32804047f0>
<AccumulateGrad object at 0x7f3280404588>
反向传播
我们使用 loss.backward() 进行误差的反向传播。但是你需要清除现有的梯度,否则梯度会已存在的梯度上累积。
我们调用 loss.backward(),并且观察 conv1 的偏差的梯度的变化。
net.zero_grad() # zeroes the gradient buffers of all parameters
print('conv1.bias.grad before backward')
print(net.conv1.bias.grad)
loss.backward()
print('conv1.bias.grad after backward')
print(net.conv1.bias.grad)
conv1.bias.grad before backward
None
conv1.bias.grad after backward
tensor([ 3.5922e-03, 7.0686e-03, 3.9444e-03, 1.1225e-02, -5.1291e-03,
-6.0605e-05])
权重的更新
实践中最简单的更新方法是随机梯度下降(Stochastic Gradient Descent, SGD):
weight = weight - learning_rate * gradient
我们可以用简单的 Python 代码来实现:
learning_rate = 0.01
for f in net.parameters():
f.data.sub_(f.grad.data * learning_rate)
然而,使用神经网络的时候,你可能会使用不同的更新方法(SGD、Nesterov-SGD、Adam、RMSProp 等)。为了满足这方面的需求,PyTorch 构建了一个包:torch.optim 实现了所有这些方法。
import torch.optim as optim # create your optimizer
optimizer = optim.SGD(net.parameters(), lr=0.01) # in your training loop:
optimizer.zero_grad() # zero the gradient buffers
output = net(input)
loss = criterion(output, target)
loss.backward()
optimizer.step() # Does the update
训练一个分类器
前面我们已经可以定义神经网络、计算损失并且更新神经网络的权重了。
那么什么是数据?
通常,当处理图像、文本、音频或者视频数据时,你可以使用标准 Python 包来将数据加载为 Numpy 数组。接着你可以把 NumPy 数组转换为 torch.*Tensor。
- 对于图片,可能使用 Pillow/OpenCV 这些包
- 对于音频,可能使用 scipy/librosa 这些包
- 对于文本,可以使用 Python/Cython/NLTK/SpaCy 进行处理
对于计算机视觉,PyTorch 提供了一个叫 torchvision 的包,可以加载常见的数据集(imagenet/CIFAR10/MNIST 等),对图片进行数据转换。
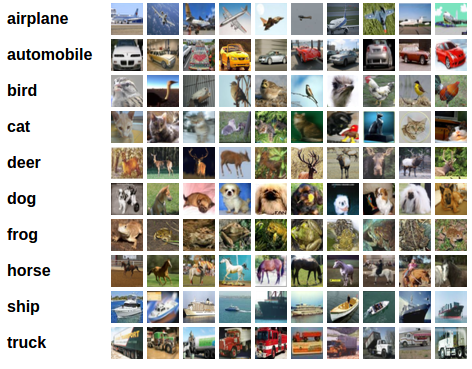
在这里,我们会使用 CIFAR10 数据集。它有这几个种类:airplane, automobile, bird, cat, deer, dog, frog, horse, ship, truck。CIFAR-10 的图片大小都是 3*32*32。
训练图片分类器
我们的步骤是这样的:
- 使用 torchvision 加载并且标准化 CIFAR10 的训练接和数据集。
- 定义一个卷积神经网络。
- 定义损失函数。
- 在训练集上训练神经网络。
- 在测试集上训练神经网络。
1. 加载并标准化 CIFAR10
使用 torchvision,要加载 CIFAR10 很容易。
import torch
import torchvision
import torchvision.transforms as transforms
torchvision 数据集的输出是范围 0~1 的 PIL 图片。我们将它标准化,范围 -1~1。
transform = transforms.Compose([
transforms.ToTensor(),
transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5))
]) trainset = torchvision.datasets.CIFAR10(root='./data', train=True, download=True, transform=transform)
trainloader = torch.utils.data.DataLoader(trainset, batch_size=4, shuffle=True, num_workers=2)
testset = torchvision.datasets.CIFAR10(root='./data', train=False, download=True, transform=transform)
testloader = torch.utils.data.DataLoader(testset, batch_size=4, shuffle=False, num_workers=2)
classes = ('plane', 'car', 'bird', 'cat', 'deer', 'dog', 'frog', 'horse', 'ship', 'truck')
下面显示部分训练图片:
import matplotlib.pyplot as plt
import numpy as np # functions to show an image def imshow(img):
img = img / 2 + 0.5 # unnormalize
npimg = img.numpy()
plt.imshow(np.transpose(npimg, (1, 2, 0)))
plt.show() # get some random training images
dataiter = iter(trainloader)
images, labels = dataiter.next() # show images
imshow(torchvision.utils.make_grid(images))
# print labels
print(' '.join('%5s' % classes[labels[j]] for j in range(4)))
2. 定义卷积神经网络
import torch.nn as nn
import torch.nn.functional as F class Net(nn.Module):
def __init__(self):
super(Net, self).__init__()
self.conv1 = nn.Conv2d(3, 6, 5)
self.pool = nn.MaxPool2d(2, 2)
self.conv2 = nn.Conv2d(6, 16, 5)
self.fc1 = nn.Linear(16 * 5 * 5, 120)
self.fc2 = nn.Linear(120, 84)
self.fc3 = nn.Linear(84, 10) def forward(self, x):
x = self.pool(F.relu(self.conv1(x)))
x = self.pool(F.relu(self.conv2(x)))
x = x.view(-1, 16 * 5 * 5)
x = F.relu(self.fc1(x))
x = F.relu(self.fc2(x))
x = self.fc3(x)
return x net = Net()
print(net)
Net(
(conv1): Conv2d(, , kernel_size=(, ), stride=(, ))
(pool): MaxPool2d(kernel_size=, stride=, padding=, dilation=, ceil_mode=False)
(conv2): Conv2d(, , kernel_size=(, ), stride=(, ))
(fc1): Linear(in_features=, out_features=, bias=True)
(fc2): Linear(in_features=, out_features=, bias=True)
(fc3): Linear(in_features=, out_features=, bias=True)
)
3. 定义损失函数和优化器
我们使用分类交叉熵和动量 SGD。
import torch.optim as optim criterion = nn.CrossEntropyLoss()
optimizer = optim.SGD(net.parameters(), lr=0.001, momentum=0.9)
4. 训练网络
%%time
for epoch in range(4): # loop over the dataset multiple times running_loss = 0.0
for i, data in enumerate(trainloader, 0):
# get the inputs; data is a list of [inputs, labels]
inputs, labels = data # zero the parameter gradients
optimizer.zero_grad() # forward + backward + optimize
outputs = net(inputs)
loss = criterion(outputs, labels)
loss.backward()
optimizer.step() # print statistics
running_loss += loss.item()
if i % 2000 == 1999: # print every 2000 mini-batches
print('[%d, %5d] loss: %.3f' %
(epoch + 1, i + 1, running_loss / 2000))
running_loss = 0.0 print('Finished Training')
[, ] loss: 2.223
[, ] loss: 1.949
[, ] loss: 1.754
[, ] loss: 1.622
[, ] loss: 1.544
[, ] loss: 1.496
[, ] loss: 1.412
[, ] loss: 1.386
[, ] loss: 1.373
[, ] loss: 1.335
[, ] loss: 1.327
[, ] loss: 1.295
[, ] loss: 1.221
[, ] loss: 1.239
[, ] loss: 1.255
[, ] loss: 1.193
[, ] loss: 1.186
[, ] loss: 1.203
[, ] loss: 1.126
[, ] loss: 1.140
[, ] loss: 1.120
[, ] loss: 1.122
[, ] loss: 1.112
[, ] loss: 1.114
Finished Training
CPU times: user 3min 34s, sys: 45.6 s, total: 4min 20s
Wall time: 4min 49s
5. 在测试集上测试网络
我们对神经网络训练了 2 次,接下来要看一下该网络是否学习到了东西。
首先展示测试集的几张图片。

接下来让我们看一下神经网络认为这几张图片是啥。
_, predicted = torch.max(outputs, 1)
print('Predicted: ', ' '.join('%5s' % classes[predicted[j]] for j in range(4)))
Predicted: cat ship plane car
结果看起来还凑合。
接下来我们看一下在整个测试集上神经网络表现得如何。
correct = 0
total = 0
with torch.no_grad():
for data in testloader:
images, labels = data
outputs = net(images)
_, predicted = torch.max(outputs.data, 1)
total += labels.size(0)
correct += (predicted == labels).sum().item() print('Accuracy of the network on the 10000 test images: %d %%' % (100 * correct / total))
Accuracy of the network on the test images: %
再看看每个分类下的表现:
class_correct = list(0. for i in range(10))
class_total = list(0. for i in range(10))
with torch.no_grad():
for data in testloader:
images, labels = data
outputs = net(images)
_, predicted = torch.max(outputs, 1)
c = (predicted == labels).squeeze()
for i in range(4):
label = labels[i]
class_correct[label] += c[i].item()
class_total[label] += 1 for i in range(10):
print('Accuracy of %5s : %2d %%' % (
classes[i], 100 * class_correct[i] / class_total[i]))
Accuracy of plane : %
Accuracy of car : %
Accuracy of bird : %
Accuracy of cat : %
Accuracy of deer : %
Accuracy of dog : %
Accuracy of frog : %
Accuracy of horse : %
Accuracy of ship : %
Accuracy of truck : %
在 GPU 上进行训练
就像之前我们把张量放到 GPU 上一样,我们需要把神经网络也放在 GPU。
如果我们有 CUDA,先定义设备:
device = torch.device('cuda:0' if torch.cuda.is_available() else 'cpu')
# Assuming that we are on a CUDA machine, this should print a CUDA device:
print(device)
cuda:
查看可以使用的 GPU 数量:
print(torch.cuda.device_count())
1
然后注意把模型和输入数据放入 GPU 进行训练:
%%time
net.to(device)
for epoch in range(4): # loop over the dataset multiple times running_loss = 0.0
for i, data in enumerate(trainloader, 0):
# get the inputs; data is a list of [inputs, labels]
inputs, labels = data
inputs, labels = inputs.to(device), labels.to(device) # zero the parameter gradients
optimizer.zero_grad() # forward + backward + optimize
outputs = net(inputs)
loss = criterion(outputs, labels)
loss.backward()
optimizer.step() # print statistics
running_loss += loss.item()
if i % 2000 == 1999: # print every 2000 mini-batches
print('[%d, %5d] loss: %.3f' %
(epoch + 1, i + 1, running_loss / 2000))
running_loss = 0.0 print('Finished Training')
[1, 2000] loss: 2.225
[1, 4000] loss: 1.895
[1, 6000] loss: 1.678
[1, 8000] loss: 1.565
[1, 10000] loss: 1.508
[1, 12000] loss: 1.467
[2, 2000] loss: 1.393
[2, 4000] loss: 1.349
[2, 6000] loss: 1.319
[2, 8000] loss: 1.317
[2, 10000] loss: 1.322
[2, 12000] loss: 1.255
[3, 2000] loss: 1.191
[3, 4000] loss: 1.200
[3, 6000] loss: 1.230
[3, 8000] loss: 1.190
[3, 10000] loss: 1.162
[3, 12000] loss: 1.167
[4, 2000] loss: 1.096
[4, 4000] loss: 1.102
[4, 6000] loss: 1.089
[4, 8000] loss: 1.099
[4, 10000] loss: 1.092
[4, 12000] loss: 1.066
Finished Training
CPU times: user 2min 27s, sys: 20.2 s, total: 2min 47s
Wall time: 3min 33s
加速效果跟神经网络的大小有关系,不适用 GPU 需要 4 分 49 秒,我们的 GPU 版本消耗时间 3 分 33 秒。我们目前的神经网络还比较小,因此加速效果并不是非常大。
【PyTorch v1.1.0文档研习】60分钟快速上手的更多相关文章
- vue mand-mobile按2.0文档默认安装的是1.6.8版本
vue mand-mobile按2.0文档默认安装的是1.6.8版本 npm list mand-mobilebigbullmobile@1.0.0 E:\webcode\bigbullmobile` ...
- Beautiful Soup 4.2.0 文档
Beautiful Soup 4.2.0 文档 Beautiful Soup 是一个可以从HTML或XML文件中提取数据的Python库.它能够通过你喜欢的转换器实现惯用的文档导航,查找,修改文档的方 ...
- css2.0文档查阅及字体样式
css2.0文档查阅下载 网址:http://soft.hao123.com/soft/appid/9517.html <html xmlns="http://www.w3.o ...
- Python2.7+virtualenv+CUDA 10.0版的pytorch v1.3.0 +运行人群计数crowdcount-mcnn网络
Python2.7$ python2 -m virtualenv pytorchenv$ source pytorchenv/bin/activate $ pip install ipython py ...
- 三分钟快速上手TensorFlow 2.0 (下)——模型的部署 、大规模训练、加速
前文:三分钟快速上手TensorFlow 2.0 (中)——常用模块和模型的部署 TensorFlow 模型导出 使用 SavedModel 完整导出模型 不仅包含参数的权值,还包含计算的流程(即计算 ...
- 三分钟快速上手TensorFlow 2.0 (中)——常用模块和模型的部署
本文学习笔记参照来源:https://tf.wiki/zh/basic/basic.html 前文:三分钟快速上手TensorFlow 2.0 (上)——前置基础.模型建立与可视化 tf.train. ...
- Vue.js——60分钟快速入门(转)
vue:Vue.js——60分钟快速入门 <!doctype html> <html lang="en"> <head> <meta ch ...
- Vue.js 60 分钟快速入门
Vue.js 60 分钟快速入门 转载 作者:keepfool 链接:http://www.cnblogs.com/keepfool/p/5619070.html Vue.js介绍 Vue.js是当下 ...
- 不会几个框架,都不好意思说搞过前端: Vue.js - 60分钟快速入门
Vue.js——60分钟快速入门 Vue.js是当下很火的一个JavaScript MVVM库,它是以数据驱动和组件化的思想构建的.相比于Angular.js,Vue.js提供了更加简洁.更易于理 ...
随机推荐
- NamedParameterJdbcTemple与RowMapper实现
NamedParameterJdbcTemplate和JdbcTemplate功能基本差不多. 1.配置 db.properties 1 jdbc.user=root 2 jdbc.password= ...
- 20165214 2018-2019-2 《网络对抗技术》Exp8 Web基础 Week11—12
<网络对抗技术>Exp8 Web基础 Week11-12 一.实验目标与内容 1.实践内容 (1).Web前端HTML 能正常安装.启停Apache.理解HTML,理解表单,理解GET与P ...
- 【技术博客】Laravel5.1文件上传单元测试
Laravel5.1文件上传单元测试 作者:ZGJ 在软工第三阶段中,我彻底解决了上一阶段一直困扰我的文件上传单元测试问题,在这里做一个总结. 注:下文介绍中,方法一方法二实现简单但有一定的限制条件( ...
- kali 命令
1.添加用户 如下命令是用root执行的 adduser dong 会直接在/home 目录创建 dong 目录 2.将用户划分到某个组 gpasswd -a user group 3.ifconfi ...
- 【CSP2019】题解合集
诈个尸 先挖坑 虽然连去都没去但还是想做做 今年貌似比去年还毒瘤啊... yrx.hjw都进了省队线tql orz (myh:没AK真丢脸 Day1T1 格雷码 Day1T2 括号树 Day1T3 树 ...
- Linux之三剑客
LINUX之三剑客 本篇主要介绍linux下常用的增删改查工具: grep sed awk grep是linux下一个强大的搜索工具,几乎操作linux的用户每天都会或多或少的用到grep命令,单一个 ...
- 在博文顶部添加文章字数及阅读时间信息:阅读本文需要xx分钟
1.在博客园设置中,页首Html代码中添加js代码 2.js代码如下 <script type="text/javascript"> $("#cnblogs_ ...
- Zookeeper的介绍与基本部署
目录 简介 架构 安装 StandAlone模式 1. 安装 2. 修改配置 3. 启动 4. 验证 5. 基本用法 Distributed模式 1. 配置hosts 2. 配置zoo.cfg 3. ...
- AAct 一款 KMS 激活工具
AAct是一款由俄罗斯网友Ratiborus制作的非常小巧实用的KMS激活工具,能自动设置密钥管理服务激活Windows.Office VL版本.支持手动安装及删除激活产品密钥.手动创建及删除续期计划 ...
- 《即时消息技术剖析与实战》学习笔记3——IM系统如何保证消息的实时性
IM 技术经历过几次迭代升级,如图所示: 从简单.低效的短轮询逐步升级到相对效率可控的长轮询: 全双工的 Websocket 彻底解决了服务端的推送问题: 基于 TCP 长连接衍生的 IM 协议,能够 ...