TurtleBot3使用课程-第三节a(北京智能佳)
目录
1.4.1运行 5
1.4.2 Turtle Bot3模型设置 5

![]()
1.[第5类]操纵
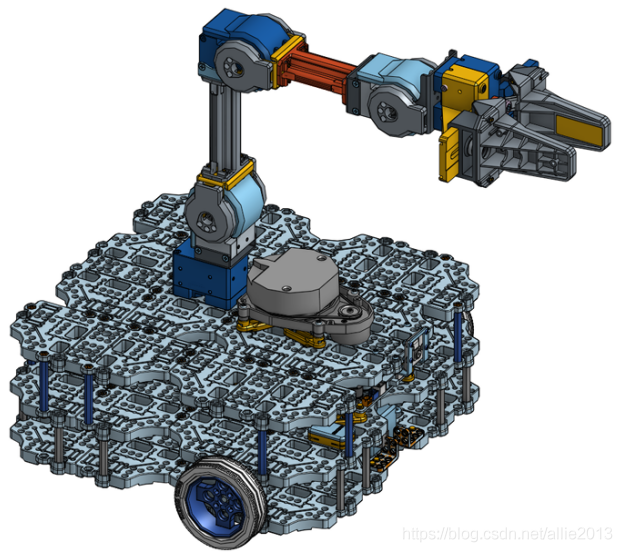
Open MANIPULATOR-X是一个支持ROS的开源机器人手臂。 因为它可以用DYNAMIXEL和3D打印机制造的零件组装,所以建造起来既简单又便宜。
此外,OpenManipulator-X被设计成与TurtleBot3 Waffle或Waffle Pi版本兼容。 在本手册中,我们将学习如何使用组装在TurtleBot3 Waffle P上的机械手。
1.1 软件的安装
[远程PC]下载并构建使用Turtle Bot3上组装的Open MANIPULATOR-X所需的包。
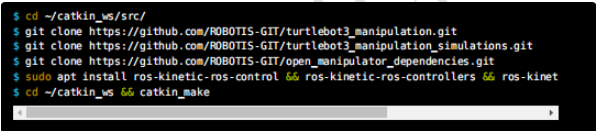
![]()
1.2 硬件设置
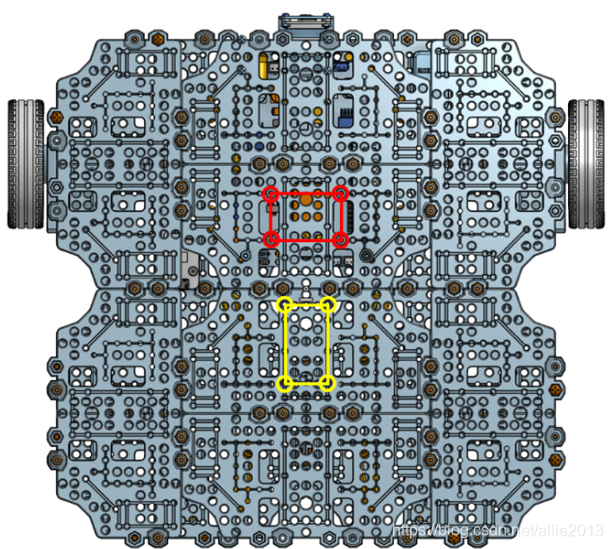
TurtleBot3 Waffle Pi 的LDS传感器位于中心。 若要附加OpenManipulator-X,请将LDS传感器移动到红色框中,并将OpenManipulator-X的第一个到黄色框中,如下图所示。 如果组装不正确,在URDF中定义的描述机器人配置的传感器和机器人臂的位置可能与实际机器人的位置不同。 这可能导致机器人手臂的意外位置或运动,导致碰撞。
![]()
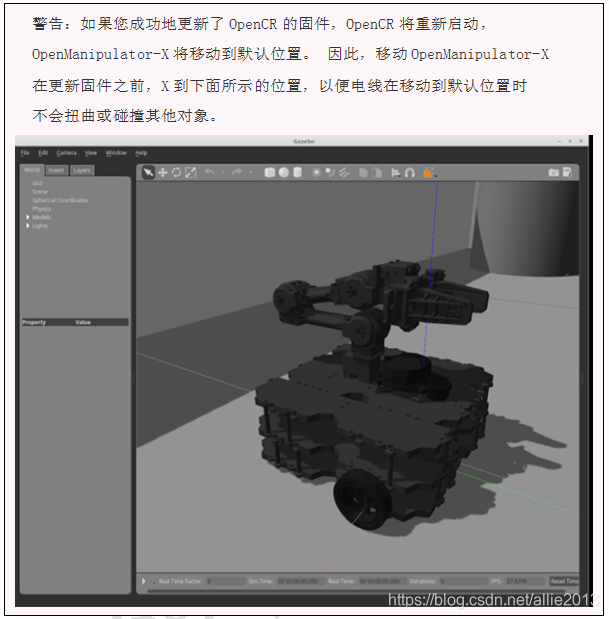
1.3 打开CR设置
为了使OpenManipulator-X连接到TurtleBot3WafflePI的OpenCR,您需要上传旨在控制连接到OpenCR的所有Dynamixels的固件。[Turtle Bot3 SBC]若要将Open CR固件上传到Turtle Bot3的Raspberry PI,请输入以下内容。

![]()
输入命令后,新固件上传到OpenCR,如果上传成功,你会看到的 
![]()
![]()
1.4 TurtleBot3 提出
1.4.1 快跑
[远程PC]运行roscore在用户PC上运行ROS1。

![]()
1.4.2 Turtle Bot3模型设置
[TurtleBot3 SBC]如果你没有定义TURTLEBOT3_MODEL在 
![]()
您必须与下面的命令一起定义正在使用的TurtleBot3模型。 你可以用
![]()
操纵平台。

![]()
1.4.3 准备行动
[TurtleBot3 SBC]使用下面的命令运行操作rosserial和LDS传感器的节点。
![]()
2.控制Gazebo模拟器中的开放管理器
2.1 运行Gazebo模拟器
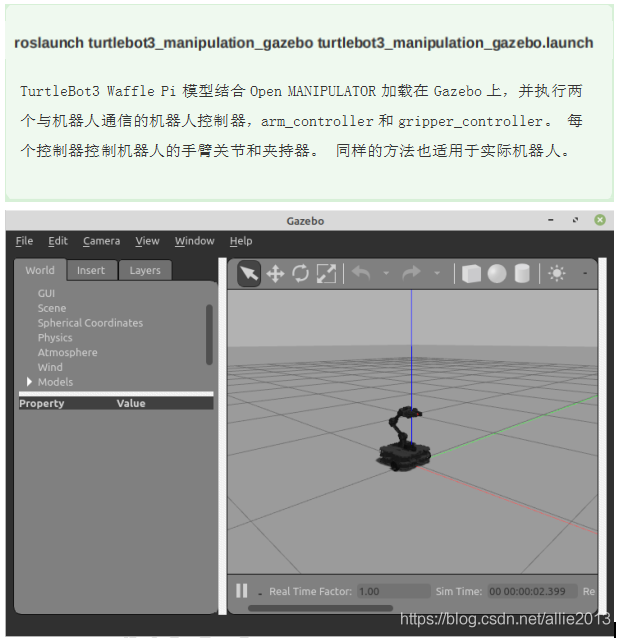
[远程PC]在一个新的终端窗口中输入以下命令,将Open MANIPULATOR应用于Gazebo环境的Turtle Bot3模型加载到Gazebo环境中。

![]()
![]()
2.2 运行move_group节点
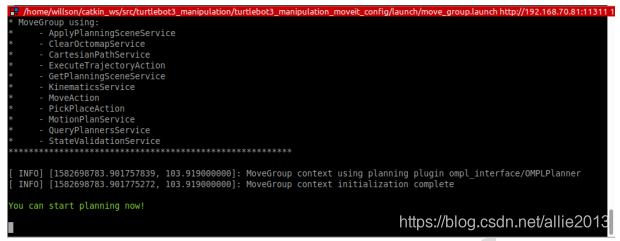
[远程PC]您必须运行move_group节点才能与移动连接。 如果模拟是通过按下Gazebo模拟器中的[]播放按钮来运行的,请输入以下命令以查看读取“您现在可以开始规划”的消息!”。
![]()
![]()
2.3 运行Rviz
[远程PC]通过导入移动它设置,使移动它在RViz上可用。
![]()
![]()
![]()
![]()
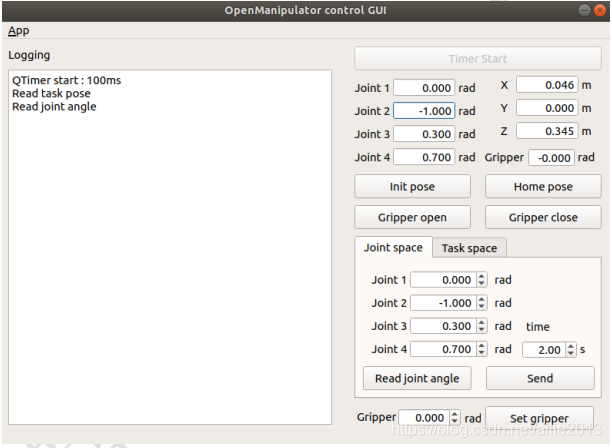
2.4 运行ROBOTIS GUI控制器
[远程PC]当通过连接到Gazebo而不使用RViz来控制机器人手臂时,ROBOTIS GUI支持任务空间控制,这是指有效的抓取
基于OpenManipulator的第一个DYNAMIXEL的夹持器的位置(夹持器之间的红色六面体),或指每个关节的角度的联合空间控制。 任何一种方法都可以根据需要使用。

![]()
![]()
![]()
3.控制实际的开放管理器-X
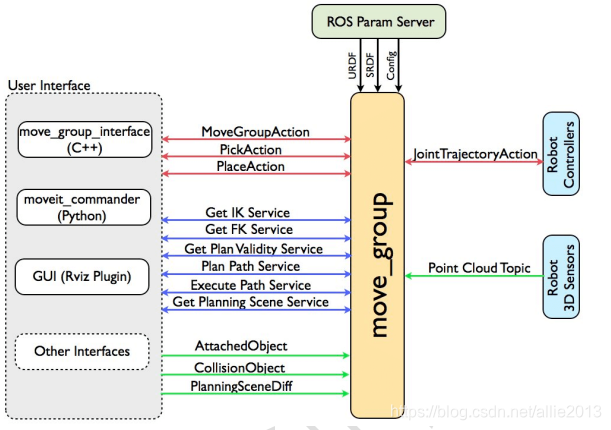
移动的move_group节点作为积分器,以ROS支持的动作形式向机器人控制器提供基于各种信息的计算轨迹
1.用户可以通过moveit提供的三个接口(C++、Python、RViz插件)访问move_group节点。 在通过用户界面接收命令时,the
move_group节点根据移动配置信息(关节角度限制、运动学分析、碰撞检测)和机器人状态信息创建并提供给机器人控制器的轨迹。
![]()
3. 1. 运行
[远程PC]运行roscore

![]()
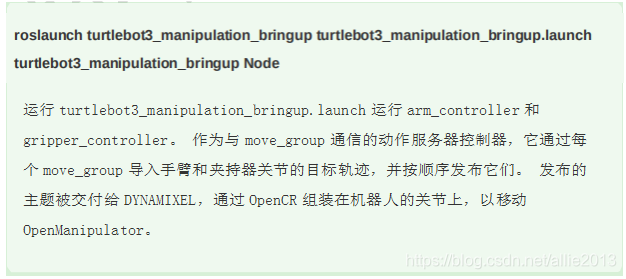
3. 2. 准备行动
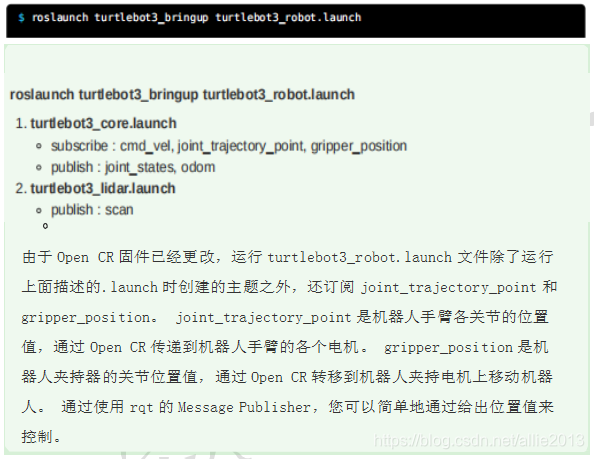
[远程PC]与基本的Turtle Bot3平台不同,需要一个服务服务器来控制Open MANIPULATOR。 因此,运行操作的启动文件如下所示

![]()
![]()
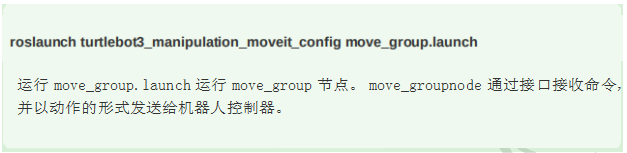
3.3 运行move_group
[远程PC]运行move_group节点,该节点是一个与移动它一起工作的用户界面。

![]()
![]()
3.4 运行 RViz
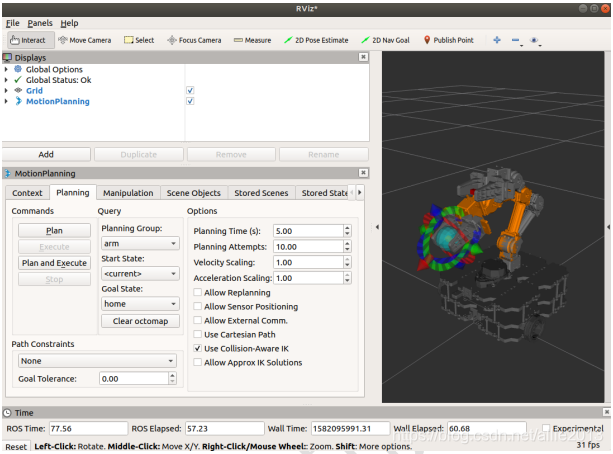
[远程PC]运行RViz以可视化各种数据并使用交互式标记控制Open MANIPULATOR。

![]()
3.5 运行ROBOTIS GUI
[远程PC]除了RViz之外,您还可以在必要时通过ROBOTIS GUI控制Open MANIPULATOR。
![]()
TurtleBot3使用课程-第三节a(北京智能佳)的更多相关文章
- TurtleBot3使用课程-第三节b(北京智能佳)
目录 1.使用TurtleBot3机械手运行SLAM 2 1.1 roscore运行 2 1.2 准备行动 3 1.3 运行SLAM节点 3 1.4 运行turtlebot3_teleop_key节点 ...
- 智能佳机械软手智能研究版 QB SOFTHAND Research
智能佳机械软手智能研究版是一种基于软机器人技术的拟人机器人手,灵活.适应性强,能够与周围环境.物体和人类进行交互,同时限制伤害操作员.破坏要处理的产品和破坏机器人本身的风险. 智能佳机械软手智 ...
- TurtleBot3使用课程-第二节b(北京智能佳)
目录 1.导航 2 1.1 运行导航节点 3 1.1.1 [远程PC]运行roscore 3 1.1.2 [turtlebot3 SBC]运行提出turtlebot3 3 1.1.3[远程PC]运行导 ...
- TurtleBot3使用课程-第二节a(北京智能佳)
目录 1.[第3类]LRF(LDS)传感器 2 1.1 传感器包安装 2 1.1.1 传感器端口访问设置 2 1.1.2 运行hlds_laser_publisher节点 2 1.1.3 在RViz中 ...
- TurtleBot3使用课程-第一节b(北京智能佳)
目录 1.模拟运行TurtleBot 2 1.1 ROS安装和设置2 1.1.1 turtlebot3 在Gazebo中模拟 3 1.1.1.1用于Gazebo的ROS包装 3 1.1.1.2 tur ...
- TurtleBot3使用课程-第一节a(北京智能佳)
目录 1.ROS设置(远程PC) 2 1.1 ROS安装和设置 2 1.1.1 设置source.list 2 1.1.2 键设置 2 1.1.3 ROS安装 2 1.1.4安装包构建的依赖关系 2 ...
- TurtleBot3使用课程-第四节(北京智能佳)
目录 1.机器学习 2 1.1 机器学习一 2 1.1.1 目标 2 1.1.2 操作环境 2 1.1.3 设置 2 1.1.4运行(它需要超过几秒取决于PC) 3 1.1.5运行屏幕 3 1.1.6 ...
- Java课程设计——象棋(201521123042 姚佳希)
1. 团队课程设计博客链接 Java课程设计(团队版) 2 个人负责模块或任务说明 ChessBoard类创建棋盘及界面. ChessPoint类创建棋盘格点及界面. ChessPiece类创建棋子及 ...
- 第一章节 BJROBOT ROS 网络配置及移动控制【ROS全开源阿克曼转向智能网联无人驾驶车】
版权声明:该教程版权归北京智能佳科技有限公司所有,未经公司授权禁止引用.发布.转载等,否则将追究其法律责任. 使用前说明:本使用文档说明略微简明,请结合指导视频进行操作会更容易理解!! 第一章节 BJ ...
随机推荐
- 第三十五章、PyQt输入部件:QFontComboBox、QLineEdit、QTextEdit、QPlainText功能详解
专栏:Python基础教程目录 专栏:使用PyQt开发图形界面Python应用 专栏:PyQt入门学习 老猿Python博文目录 一.引言 输入部件量比较多,且功能很丰富,但除了用于编写编辑器.浏览器 ...
- PyQt(Python+Qt)学习随笔:QDockWidget停靠窗toggleViewAction方法的作用
专栏:Python基础教程目录 专栏:使用PyQt开发图形界面Python应用 专栏:PyQt入门学习 老猿Python博文目录 toggleViewAction方法返回一个动作对象,该动作对象通过点 ...
- HTTP请求头和响应头详解【转】
最近老猿在开始学习爬虫相关的知识,由于老猿以前只做非web的后台应用,发现相关知识太过匮乏,导致学习很困难,为此不得不从一些基础知识恶补开始,对于这些知识,老猿会将网上找到的比较认可的内容直接转发. ...
- 虚拟机(centos7)网络配置
修改网络配置(ip等) VWware右上角,选择编辑---虚拟网络编辑器 可以看到子网ip是 192.168.1.0,那么我们分配ip地址就可以从此ip段开始. 再点击NAT设置 这里的网关我们稍后会 ...
- SELECT 1,2,3...的含义及其在SQL注入中的用法
首先,select 之后可以接一串数字:1,2,3-只是一个例子,这串数字并不一定要按从小到大排列,也不一定从1开始,这串数字的值和顺序是任意的,甚至可以是重复的,如:11,465,7461,35 或 ...
- 微软面试题:剑指 Offer 51. 数组中的逆序对 Hard 出现次数:3
题目描述: 在数组中的两个数字,如果前面一个数字大于后面的数字,则这两个数字组成一个逆序对. 输入一个数组,求出这个数组中的逆序对的总数. 示例 1: 输入: [7,5,6,4] 输出: 5 限制: ...
- 前端js实现九宫格模式抽奖(多宫格抽奖)
介绍: 前端九宫格是一种常见的抽奖方式,js实现如下,掌握其原理,不论多少宫格,都可以轻松应对.(代码可复制直接运行看效果). 该案例以四宫格入门,可扩展多宫格,奖品模块的布局可自由设置. <! ...
- 二、TestNG的Hello World
创建第一个TestNG的例子 1.创建一个TestNG的类 选择项目路径"右键"--NEW--Other 选择TestNG cLass(如果没有这个选项是testng没有配置成功) ...
- Python定时任务利器—Apscheduler
导语 在工作场景遇到了这么一个场景,就是需要定期去执行一个缓存接口,用于同步设备配置.首先想到的就是Linux上的crontab,可以定期,或者间隔一段时间去执行任务.但是如果你想要把这个定时任务作为 ...
- element Cascader 多选 点击文字选中
html 部分 1 <el-form-item label="A部署位置" > 2 <el-cascader 3 v-model="itemType.a ...