第四章节 BJROBOT 线速度校正 【ROS全开源阿克曼转向智能网联无人驾驶车】

BJROBOT 线速度校正
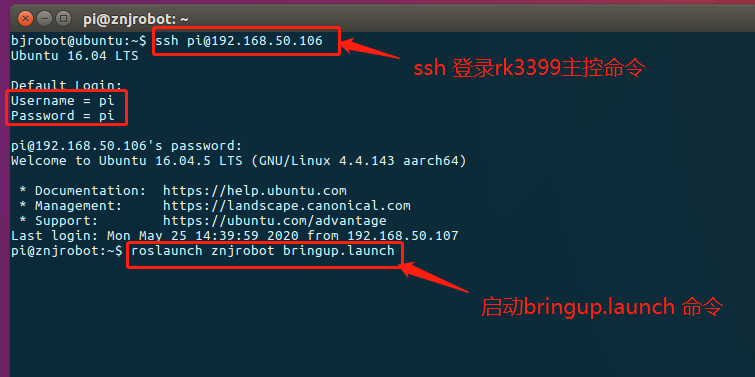
1.把小车平放在地板上,用卷尺作为测量刻度,选取车头或者车尾处作为小车的起点, 打开资料里的虚拟机,打开一个终端 ssh 过去主控端启动
roslaunch znjrobot bringup.launch。
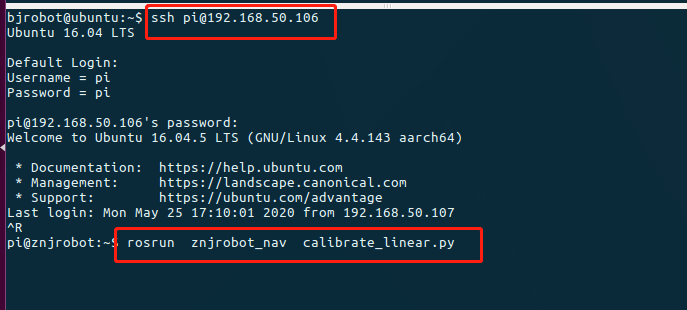
2.在虚拟机端打开一个终端,ssh 过去小车主控端,启动校正线速度命令rosrunznjrobot_nav calibrate_linear.py
3.在虚拟机端再打开一个终端,直接启动 rosrunrqt_reconfigure rqt_reconfigure

4点击 start_test,进行第一次的走一米测试,测量小车走的距离。
假如小车走了 1.1 米,那么线速度的比例系数 linear_scale = 1.1/1=1.1 假如小车走了 0.9 米,那么线速度的比例系数 linear_scale = 0.9/1= 0.9
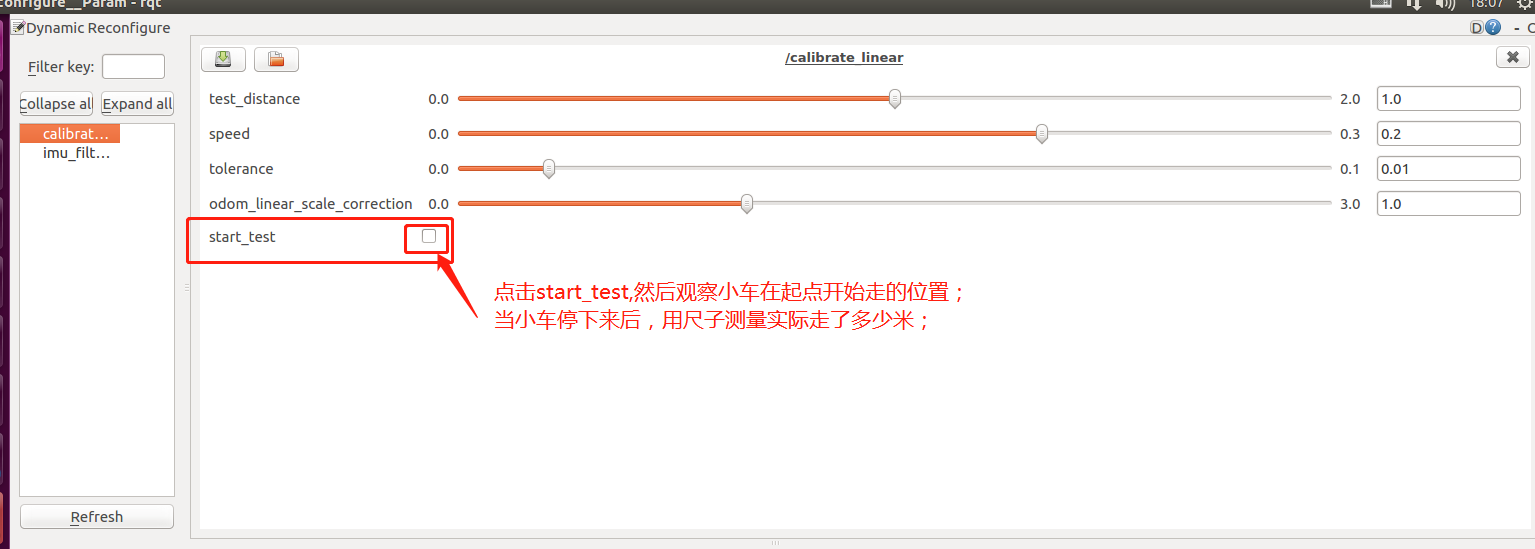
5.然后车放回原来起点位置,把比例系数修改到下图所示位置,再点击 start_test,当小车停下来的时候,再次测量小车是否走了一米,如果接近或者差不多 1 米,那么这个比例系数就是正确的。误差再 1 厘米以内可以接
受。
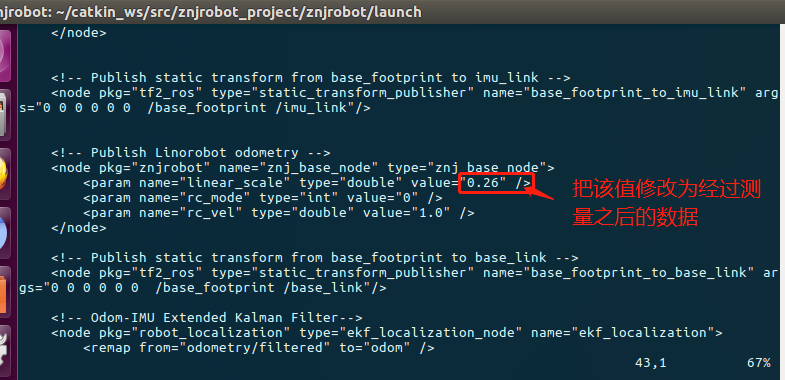
6.在主控端的bringup.launch 文件中把linear_scale 修改成实际计算好的线速度比例系数。
更多精彩视频演示和教程请点击:https://space.bilibili.com/521688736


第四章节 BJROBOT 线速度校正 【ROS全开源阿克曼转向智能网联无人驾驶车】的更多相关文章
- 第一章节 BJROBOT ROS 网络配置及移动控制【ROS全开源阿克曼转向智能网联无人驾驶车】
版权声明:该教程版权归北京智能佳科技有限公司所有,未经公司授权禁止引用.发布.转载等,否则将追究其法律责任. 使用前说明:本使用文档说明略微简明,请结合指导视频进行操作会更容易理解!! 第一章节 BJ ...
- 第三章节 BJROBOT 角速度校正 【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot bringup.launch . 2.再打开一个终端 ssh 过去主控端,启动校 ...
- 第二章节 BJROBOT IMU 自动校正 【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot bringup.launch . 2.再打开一个终端,ssh 过去主控端,在 ~/c ...
- 第十五章节 BJROBOT cartographer 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
建地图前说明:请确保你的小车已经校正好 IMU.角速度.线速度,虚拟机配置好 ROS 网络的前提进行,否则会造成构建地图无边界.虚拟机端无法正常收到小车主控端发布的话题数据等异常情况!! 1.把小车平 ...
- 第14章节 BJROBOT karto 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
建地图前说明:请确保你的小车已经校正好 IMU.角速度.线速度,虚拟机配置好 ROS 网络的前提进行,否则会造成构建地图无边界.虚拟机端无法正常收到小车主控端发布的话题数据等异常情况!! 1.把小车平 ...
- 第十九章节 BJROBOT 安卓手机 APP 导航【ROS全开源阿克曼转向智能网联无人驾驶车】
导航前说明:一定要确保你小车在构建好地图的基础上进行! 1.把小车平放在你想要构建地图区域的地板上,打开资料里的虚拟机,打开一个终端, ssh 过去主控端启动roslaunch znjrobot br ...
- 第八章节 BJROBOT hector 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot bringup.launch. 2.在虚拟机端打开一个终端,ssh 过去主控端启动r ...
- 第十八章节 BJROBOT 安卓手机 APP 建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobotbringup.launch 2.在虚拟机端再打开一个终端,ssh 过去主控端启动ro ...
- 第十章节 BJROBOT PID 动态调节【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车架空,平放在地板上,注意四个轮子一定要悬空.用资料里的虚拟机,打开一个终端 ssh 过去主控端启动 roslaunch znjrobot bringup.launch. 2.在虚拟机端再 ...
随机推荐
- Android10_原理机制系列_PMS的启动及应用的安装过程
概述 这里主要介绍 PackageManagerService(简称PMS)的启动 和 一个应用的安装过程.这里只是大致总结,供参考,不少地方同样需要进一步深入了解学习的. 该篇相关代码也是基于And ...
- 2、pytorch——Linear模型(最基础版,理解框架,背诵记忆)(调用nn.Modules模块)
#define y = X @ w import torch from torch import nn #第一模块,数据初始化 n = 100 X = torch.rand(n,2) true_w = ...
- 小程序map地图点击makert放大效果和点击放大地图
WXML文件和JS文件代码在下方 <view class='map'> <map id="map" longitude="{{location.lng} ...
- H5相关知识点整理
01-HTML5基础 了解HTML5 ☞HTML5属于上一代HTML的新迭代语言,设计HTML5最主要的目的是为了在移动设备上支持多媒体!!! 例如: video 标签和 audio 及 canvas ...
- #2020征文-开发板#SYS_RUN()和MODULE_INIT()之间的那些事
接触鸿蒙设备开发有一段时间了,也是时候好好挖一挖鸿蒙设备程序的启动流程了. 破冰问题:鸿蒙设备程序从哪里开始运行的? 相信大家都已经非常清楚了,鸿蒙设备程序需要指定入口函数,具体表现在代码层面就是通过 ...
- ACM里的期望和概率问题 从入门到精通
起因:在2020年一场HDU多校赛上.有这么一题没做出来. 题目链接:http://acm.hdu.edu.cn/showproblem.php?pid=6829 题目大意:有三个人,他们分别有X,Y ...
- linux tar 压缩和解压缩
tar -c: 建立压缩档案-x:解压-t:查看内容-r:向压缩归档文件末尾追加文件-u:更新原压缩包中的文件 这五个是独立的命令,压缩解压都要用到其中一个,可以和别的命令连用但只能用其中一个. 下面 ...
- LLVM程序分析日记之插桩BranchInst
1. splitblockandinsertifthenelse() 一个代码例子:StackOverflow 2. SplitBlockAndInsertIfThen() 或者仅仅想插桩if the ...
- ES6、ES7、ES8
ES6 https://es6.ruanyifeng.com/ ES7 1.Array.prototype.includes() includes()作用,是查找一个值在不在数组里,若是存在则返回 ...
- vue第十二单元(vue中过渡效果的实现)
第十二单元(vue中过渡效果的实现) #课程目标 熟练掌握transition组件的用法 熟练使用transition组件做过渡特效 熟练使用transition组件做动画特效 了解使用transit ...