ROS-TF-新建坐标系
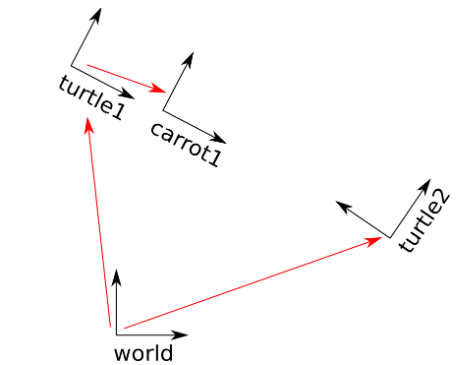
前言:在前面的试验中,我们分别有wolrd,turtle1和turtle2三个坐标系,并且world是turtle1和turtle2的父坐标系。现在我们来新建一个自定义坐标系,让turtle2跟着新的坐标系”carrot“运动。
参考自:http://wiki.ros.org/tf/Tutorials/Adding%20a%20frame%20%28C%2B%2B%29
一、新建源文件
新建frame_tf_broadcaster.cpp文件,内容如下:
#include <ros/ros.h>
#include <tf/transform_broadcaster.h>
int main(int argc, char** argv){
ros::init(argc, argv, "my_tf_broadcaster");
ros::NodeHandle node;
tf::TransformBroadcaster br;
tf::Transform transform;
ros::Rate rate(10.0);
while (node.ok()){
transform.setOrigin( tf::Vector3(0.0, 2.0, 0.0) );//设置新坐标系相对位置关系
transform.setRotation( tf::Quaternion(, , , ) );//设置新坐标系相对旋转关系
br.sendTransform(tf::StampedTransform(transform, ros::Time::now(), "turtle1", "carrot1"));//创建一个新坐标系carrot1,距离父坐标系turtle1距离2米
rate.sleep();
}
;
};
二、修改launch文件
在launch文件中添加代码:
<launch>
...
<node pkg="learning_tf" type="frame_tf_broadcaster"
name="broadcaster_frame" />
</launch>
三、修改广播信息
修改turtle_tf_listener.cpp文件
listener.lookupTransform(), transform);
四、运行
编译并运行launch文件
roslaunch learning_tf start_demo.launch
现在turtle2始终跟随在carrot坐标系运动。
-END-
ROS-TF-新建坐标系的更多相关文章
- ROS tf-增加坐标系
博客参考:https://www.ncnynl.com/archives/201702/1312.html ROS与C++入门教程-tf-增加坐标系 说明: 介绍如何为TF增加额外固定的坐标系 为何增 ...
- ROS tf监听编写
博客转载自:https://www.ncnynl.com/archives/201702/1311.html ROS与C++入门教程-tf-编写tf listener(监听) 说明: 介绍如何使用tf ...
- QT插件+ROS 2 新建项目
一QT插件开发ROS,http://www.ncnynl.com/archives/201701/1277.html 二QT开发遇到问题http://blog.csdn.net/u013453604/ ...
- ROS tf广播编写
博客参考:https://www.ncnynl.com/archives/201702/1310.html ROS与C++入门教程-tf-编写tf broadcaster(广播) 说明: 介绍如何广播 ...
- ROS tf 编程指南
ROS (Robot Operating System, 机器人操作系统)是最知名的机器人操作系统,广泛应用于无人驾驶和机器人,tf(transforms,坐标系转换)是ROS下的一个常用的工具库.r ...
- ROS tf基础使用知识
博客参考:https://www.ncnynl.com/archives/201702/1306.html ROS与C++入门教程-tf-坐标变换 说明: 介绍在c++实现TF的坐标变换 概念: Co ...
- ROS TF——learning tf
在机器人的控制中,坐标系统是非常重要的,在ROS使用tf软件库进行坐标转换. 相关链接:http://www.ros.org/wiki/tf/Tutorials#Learning_tf 一.tf简介 ...
- ROS tf
一.节点中使用(cpp,python) 1. ros wiki 提供的tutorials 2. https://blog.csdn.net/start_from_scratch/article/det ...
- ROS tf 两个常用的函数
/** \brief Get the transform between two frames by frame ID. * \param target_frame The frame to wh ...
- ROS Learning-014 learning_tf(编程) 坐标系变换(tf)广播员 (Python版)
ROS Indigo learning_tf-01 坐标系变换(tf)广播员 (Python版) 我使用的虚拟机软件:VMware Workstation 11 使用的Ubuntu系统:Ubuntu ...
随机推荐
- 总结这几天js的学习内容
对js中难点的理解 1.把变量对象像遍历数组一样简单 对于数组 ,迭代出来的是数组元素,对于对象 ,迭代出来的是对象的属性: var obj = { w: "wen", j: &q ...
- 破解js中的this指向
首先必须要说的是,this的指向在函数定义的时候是确定不了的,只有函数执行的时候才能确定this到底指向谁,实际上this的最终指向的是那个调用它的对象(这句话有些问题,后面会解释为什么会有问题,虽然 ...
- 【微软2017年预科生计划在线编程笔试 A】Legendary Items
[题目链接]:https://hihocoder.com/problemset/problem/1489 [题意] 每轮游戏; 你一开始有p的概率获得超神标记; 如果这轮游戏你没获得超神标记; 那么你 ...
- ActiveMQ学习总结(10)——ActiveMQ采用Spring注解方式发送和监听
对于ActiveMQ消息的发送,原声的api操作繁琐,而且如果不进行二次封装,打开关闭会话以及各种创建操作也是够够的了.那么,Spring提供了一个很方便的去收发消息的框架,spring jms.整合 ...
- JSON中getInt()和optInt()的区别
最近在用org.json这个包解析json的时候,发现谷歌提供两种不同的数据类型获取方法,比如说针对Int类型,提供了getInt()和optInt()两种方式,谷歌文档中的说明如下: 那么这两者有什 ...
- [TYVJ1730]二逼平衡树
[TYVJ1730]二逼平衡树 题目 您需要写一种数据结构(可参考题目标题),来维护一个有序数列,其中需要提供以下操作:1.查询k在区间内的排名2.查询区间内排名为k的值3.修改某一位值上的数值4.查 ...
- pandas中选取某行为缺失值的数据,并返回
1.df.dropna() 可以返回去掉NaN的df结果集. 2.pandas中dataframe取差集: df=pd.DataFrame({"name":[1,2,3,np.Na ...
- Flume安装部署
Flume安装部署 Flume的安装(非常简单) 上传安装包到数据源所在节点上,实际上不是数据源节点也是可以的,只要运行Flume的这台机器与数据源节点的这台机器能够通过某种协议进行通信即可. 然后解 ...
- nyoj_264_国王的魔镜_201311271800
国王的魔镜 时间限制:3000 ms | 内存限制:65535 KB 难度:1 描述 国王有一个魔镜,可以把任何接触镜面的东西变成原来的两倍——只是,因为是镜子嘛,增加的那部 ...
- V - 吉哥系列故事――完美队形I Manacher
吉哥又想出了一个新的完美队形游戏! 假设有n个人按顺序站在他的面前,他们的身高分别是h[1], h[2] ... h[n],吉哥希望从中挑出一些人,让这些人形成一个新的队形,新的队形若满足以下三点要 ...