光流法详解之一(LK光流)
Lucas–Kanade光流算法是一种两帧差分的光流估计算法。它由Bruce D. Lucas 和 Takeo Kanade提出 [1]。
LK光流法有三个假设条件:
1. 亮度恒定:一个像素点随着时间的变化,其亮度值(像素灰度值)是恒定不变的。这是光流法的基本设定。所有光流法都必须满足。
2. 小运动: 时间的变化不会引起位置的剧烈变化。这样才能利用相邻帧之间的位置变化引起的灰度值变化,去求取灰度对位置的偏导数。所有光流法必须满足。
3. 空间一致:即前一帧中相邻像素点在后一帧中也是相邻的。这是LK光流法独有的假定。因为为了求取x,y方向的速度,需要建立多个方程联立求解。而空间一致假设就可以利用邻域n个像素点来建立n个方程。
LK光流算法原理的数学推导:
假设前一帧时间为t, 后一帧时间为t+δt。则前一帧I的像素点I(x, y, z, t)在后一帧中的位置为I(x+δx, y+δy, z+δz, t+δt )。
① 根据亮度恒定假设:

② 根据小运动假设, 将上式右侧用泰勒级数展开:

H.O.T是泰勒级数展开式的高阶项,小运动情况下可以 忽略为0.
③ 根据上面两个公式可以得到:

或者下面的公式:

而对于二维图像而言,只需要考虑x, y, t即可,其中Ix,Iy It分别为图像在(x, y, t)方向的差分,写为如下形式:
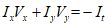
④ 现在有两个未知数,只有一个方程。因此用到第三个假设:即空间一致性假设,LK算法是利用3x3窗口内的9个像素点建立9个方程。简写为下面的形式:
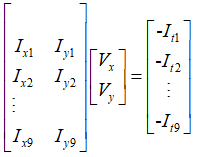
写成矩阵形式:

当然两个未知数,9个方程,这是一个超定问题,采用最小二乘法解决:
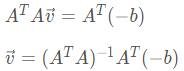
写成如下形式:
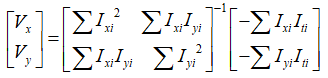
根据上式通过累加邻域像素点在三个维度的偏导数并做矩阵运算,即可算出该点的光流(Vx,Vy)。
源代码及效果:
源代码见这里:https://blog.csdn.net/xiaoyufei117122/article/details/53693627。
效果并不好,很多错误匹配点。

参考文献:
[1]. Lucas B and Kanade T. An Iterative Image RegistrationTechnique with an Application to Stereo Vision. Proc. Of 7th InternationalJoint Conference on Artificial Intelligence (IJCAI), pp.674-679.
光流法详解之一(LK光流)的更多相关文章
- HS 光流法详解
前言 本文较为详细地介绍了一种经典的光流法 - HS 光流法. 光流法简介 当人的眼睛与被观察物体发生相对运动时,物体的影像在视网膜平面上形成一系列连续变化的图像,这一系列变化的图像信息不断 &quo ...
- 光流法详解之二(HS光流)
Horn–Schunck光流算法[1]是一种全局方法估算光流场. 参考博文:https://blog.csdn.net/hhyh612/article/details/79216021 假设条件: H ...
- HS光流算法详解<转载>
HS 光流法详解 前言 本文较为详细地介绍了一种经典的光流法 - HS 光流法. 光流法简介 当人的眼睛与被观察物体发生相对运动时,物体的影像在视网膜平面上形成一系列连续变化的图像,这一系列变化的图像 ...
- RAII惯用法详解
[1]什么是RAII惯用法? RAII是Resource Acquisition Is Initialization的缩写,意为“资源获取即初始化”. 它是C++之父Bjarne Stroustrup ...
- LK光流算法公式详解
由于工程需要用到 Lucas-Kanade 光流,在此进行一下简单整理(后续还会陆续整理关于KCF,PCA,SVM,最小二乘.岭回归.核函数.dpm等等): 光流,简单说也就是画面移动过程中,图像上每 ...
- SLAM入门之视觉里程计(6):相机标定 张正友经典标定法详解
想要从二维图像中获取到场景的三维信息,相机的内参数是必须的,在SLAM中,相机通常是提前标定好的.张正友于1998年在论文:"A Flexible New Technique fro Cam ...
- KKT条件和拉格朗日乘子法详解
\(\frac{以梦为马}{晨凫追风}\) 最优化问题的最优性条件,最优化问题的解的必要条件和充分条件 无约束问题的解的必要条件 \(f(x)\)在\(x\)处的梯度向量是0 有约束问题的最优性条件 ...
- 扩展欧几里得算法详解(exgcd)
一.前言 本博客适合已经学会欧几里得算法的人食用~~~ 二.扩展欧几里得算法 为了更好的理解扩展欧几里得算法,首先你要知道一个叫做贝祖定理的玄学定理: 即如果a.b是整数,那么一定存在整数x.y使得$ ...
- lca(最近公共祖先(在线)) 倍增法详解
转自大佬博客 : https://blog.csdn.net/lw277232240/article/details/72870644 描述:倍增法用于很多算法当中,通过字面意思来理解 LCA是啥呢 ...
随机推荐
- python 用文本来提供输入信息的模板,不用每次都手动粘贴了
#下面这一段用一个txt来保存input的信息来模拟input.最后提交代码时候删除这一段即可. a9999=open('1.txt','r') def input(): return a9999.r ...
- js 时间戳转日期
timestampToTime(10位时间戳) function timestampToTime(timestamp) { var date = new Date(timestamp * 1000); ...
- ABP框架系列之九:(Abp-Session-会话)
Introduction ASP.NET Boilerplate provides IAbpSession interface to obtain current user and tenant wi ...
- JAVA核心问题(一)反射之引言 构造函数
反射,简单来说,就是在运行时获取Class对象的所有属性和方法,无论公有私有.虽然是一个基础问题,在这里还是全面的记录一下,认真对待! 获取构造函数 构造函数大致分为两种,public和非public ...
- 基于UML的公开招聘教师管理系统建模的研究和设计
一.基本信息 标题:基于UML的公开招聘教师管理系统建模的研究和设计 时间:2018 出版源:赤峰学院学报(自然科学版) 领域分类:UML:公开招聘教师系统:面向对象方法:建模. 二.研究背景 问题定 ...
- Codesmith怎么判断sqlserver数据库字段是不是标识自增字段
Codesmith怎么判断sqlserver数据库字段是不是标识自增字段 使用ExtendedProperty扩展信息判断 CS_isIdentity:是否为标识符,不支持Access CS_isCo ...
- Integer包装类源码分析
版权声明:本文为博主原创文章,转载请注明出处,欢迎交流学习! 今天上班的途中在手机里看到几道关于Integer拆装箱的小题目,正好有点时间翻看了一下Integer类的源码,加上自己的一点思考,决定写点 ...
- c# 遍历所有安装程序 获取所有已经安装的程序
/// <summary> /// 获取所有已经安装的程序 /// </summary> /// <param name="reg"></ ...
- MySQL学习笔记2(多表操作)
外键:使两张表之间存在关联 特点: 1.从表外键的值是对主表主键的引用 2.从表外键类型,必须与主表主键类型一致 示例: 创建两个表并准备数据: USE mybase; CREATE TABLE ca ...
- 写一个shell 快速启动停止你的微服务吧
在这个微服务盛行的时代,docker获得了巨大的成功,因为我们需要在一台服务器装上N个服务. 本文不是想讨论如何使用docker,而是,在一台服务器安装了多个服务后,怎样启动方便的启动服务呢? 一.在 ...