一、Linux 设备驱动介绍及开发环境搭建(续)
1.2.6 uboot 编译安装
- 嵌入式 bootloader 的功能:
- 功能类似于 PC 的 BIOS、硬件检测是否正常
- 加载操作系统镜像到 RAM
- 设置不同的启动方式
- 常见的启动方式:
- NOR/NAND Flash 启动
- 从 SD 卡启动
- Bootloader 从网络加载 Linux 内核启动
- uboot 编译
- 下载地址:ftp://ftp.denx.de/pub/u-boot/
- 获取得版本为 u-boot-2017.01.tar.bz2,发布时间为 2017-1-15
- 主 Makefile 中修改 CROSS_COMPILE,config.mk 中修改 ARCH
- 配置 make vexpress_ca9x4_defconfig
- 编译 make -j8
- 测试 uboot 可用:qemu-system-arm -M vexpress-a9 -kernel u-boot -nographic -m 512M
- 下载地址:ftp://ftp.denx.de/pub/u-boot/
- 采用桥接(bridge)的网络连接与 Host 通信
- 需要主机内核 tun/tap 模块支持
- 配置:
- 主机安装工具包
- sudo apt-get install uml-utilities
- sudo apt-get install bridge-utils
- 创建 tun 设备文件:/dev/net/tun,工具安装成功后,会生成此设备节点

- 开启 tun 网络功能,使其声线:
- 修改 /etc/network/interfaces 文件,重启生效

- 配置 /etc/qemu-ifup、/etc/qemu-ifdown 脚本,这些可能自动生成了,那就不需要配置
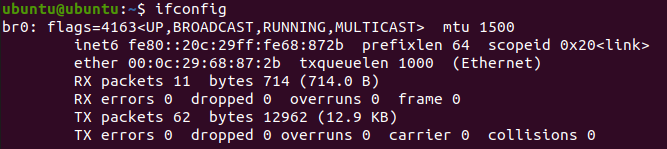
- 重启,使 br0 生效:
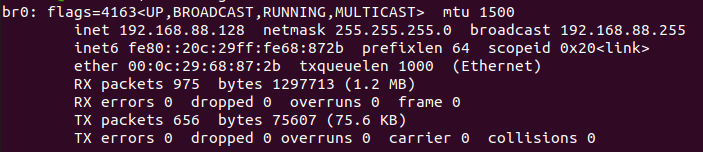
虚拟网口 br0 是 QEMU 虚拟机与Linux主机通讯的网口
- 主机安装工具包
- 内核配置编译:
- 使用 u-boot 引导内核镜像
- 需要将内核编译为 uImage 格式
- 需要指定 uImage 的加载地址
- 编译时指定:make LOADADDR=0x60003000 uImage -j8
- 使用 u-boot 引导内核镜像
- 主机 TFTP 工具安装
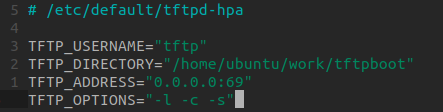
- 工具安装:sudo apt-get install tftp-hpa tftpd-hpa xinetd
- 修改配置文件:/etc/default/tftpd-hpa
- TFTP_DIRECTORY 是我们的工作目录,开发板从此目录下载镜像和配置文件,我们的镜像和配置文件也存放此目录中
- 创建 tftpboot 目录,mkdir tftpboot, chmod 777 tftpboot
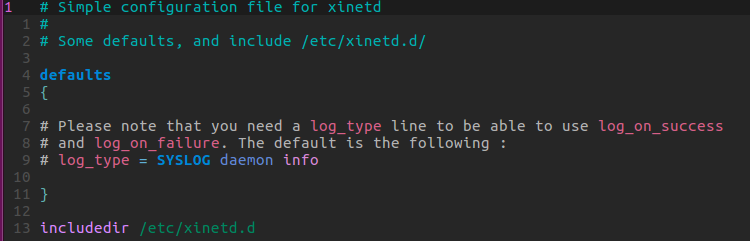
- 配置 /etc/xinetd.conf,如果没有此文件,则创建此文件:
- 配置 /etc/xinetd.d/tftp 文件,如果没有此文件,则创建此文件
- 重启 tftp:
- sudo /etc/init.d/tftpd-hpa restart
- sudo /etc/init.d/xinetd reload
- sudo /etc/init.d/xinetd restart
- 测试 tftp
- cd ..
- tftp localhost
- tftp> get test.c
- 获取文件成功,则OK
- 测试 tftp
- 启动测试:
- qemu-system-arm -M vexpress-a9 -kernel u-boot -nographic -m 512M -net nic,vlan=0 -net tap,vlan=0,ifname=tap0 -sd rootfs.ext3
- 注意:若是高版本得QEMU,则去掉 vlan 参数
- 脚本在最后
启动成功后,需要对 uboot 配置网络功能,即 QEMU 网络功能设置

1.3 挂载 NFS 文件系统
1.3.1 介绍
- 主机 HOST 支持 NFS 服务
- 安装:sudo apt-get install nfs-kernel-server
- 配置NFS
- 在 /etc/exports 文件中添加:
- /home/rootfs *(rw,sync,no_root_squash,no_subtree_check)
- /home/rootfs:是根文件系统的主目录
- rw:可读可写
- sync:磁盘和内存进行同步
- no_root_squash:不执行开发板 root 用户映射为主机的匿名用户,保证权限重组
- no_subtree_check:不检查根文件系统的子目录
- 开启 NFS 服务
- /etc/init.d/rpcbind restart
- /etc/init.d/nfs-kernel-server restart
- 修改 bootargs 启动参数
- 设置为 NFS 为根文件系统
- 设置主机 NFS 文件系统的地址

- nfsroot 是主机的 IP 地址
- ip 是开发板的 IP 地址
- 注意:若是 QEMU 得版本较高,则参数配置如下:

即相比于低版本 QEMU,在nfsroot 后添加了 proto=tcp,nfsvers=3,nolock 三个参数
- 内核支持挂载 NFS 文件系统
- make menuconfig 配置
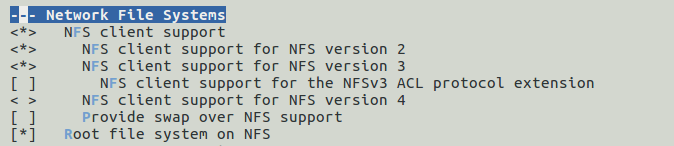
- 修改完后:make uImage -j8
- 由于暂时 uboot 没办法启动内核,则单独启动内核

- VFS 已经 mount 成功
- 在根文件系统(/home/coco/work/rootfs)下创建一个文件:test.c,然后在 linux 控制台查看是否存在此文件


1.3.2 完善跟文件系统
- 启动流程:
- Linux 内核启动之后,挂载 NFS或其他根文件系统
- 然后开启 init 进程(前面设置的 bootargs 中,init=/linuxrc),这个init 进程会执行 inittab 脚本
- 增加内核的各种用户接口,用户接口存在 /proc 和 /sys 下
- /etc 内核配置和启动文件,需要在下面添加以下文件
- inittab:脚本文件,运行命令
- /etc 内核配置和启动文件,需要在下面添加以下文件
::sysinit:/etc/init.d/rcS ///< 启动 rcS 脚本
#::respawn:-/bin/sh
#tty2::askfirst:-/bin/sh
#::ctrlaltdel:/bin/umount -a -r console::askfirst:-/bin/sh ///< 启动控制台,控制台与 shell 绑定一起,"-" 表示启动 shell 之前,要启动 profile
::ctrlaltdel:/sbin/reboot
::shutdown:/bin/umount -a -r
- fstab:文件init.d:目录
挂载的文件系统 挂载的目录
proc /proc proc defaults
tmpfs /tmp tmpfs defaults
sysfs /sys sysfs defaults
tmpfs /dev tmpfs defaults
var /dev tmpfs defaults
ramfs /dev ramfs defaults 注意:挂载的目录必须在根文件系统下存在,不存在则创建,这个文件的作用就是将文件系统挂载到目录的节点上
- rcS:文件
#!bin/sh
# 设置环境变量
PATH=/sbin:/bin:/usr/sbin:/usr/bin
LD_LIBRARY_PATH=/lib
export PATH LD_LIBRARY_PATH # 挂载各种文件系统,挂载的文件系统与 fstab 有关
mount -a
mkdir -p /dev/pts
mount -t devpts devpts /dev/pts
mdev -s
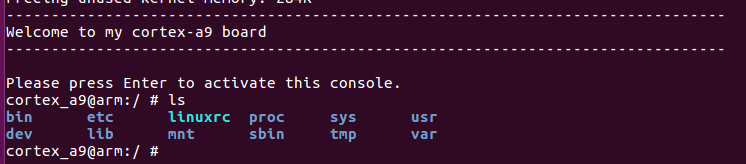
mkdir -p /var/lock echo "--------------------------------------------------------------------------------" echo "Welcome to my cortex-a9 board" echo "--------------------------------------------------------------------------------"
- profile:文件
PS1='cortex_a9@arm:\w # ' ///< 显示控制台的格式,就相当于终端中的 coco@ubuntu:~/work/rootfs/etc$
export PS1 注意:此文件也可以做其他操作
- 重启 reboot 功能,已经在 inittab 中操作
- 最终结果
1.4 在开发板上运行应用和内核驱动程序
1.4.1 运行应用程序
main.c
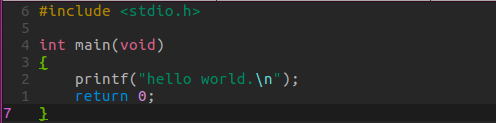
执行交叉编译:arm-linux-gnueabi-gcc main.c
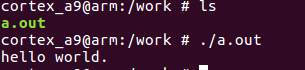
将生成 a.out 拷贝进开发板中(NFS 文件系统),并执行:
1.4.2 运行内核驱动程序
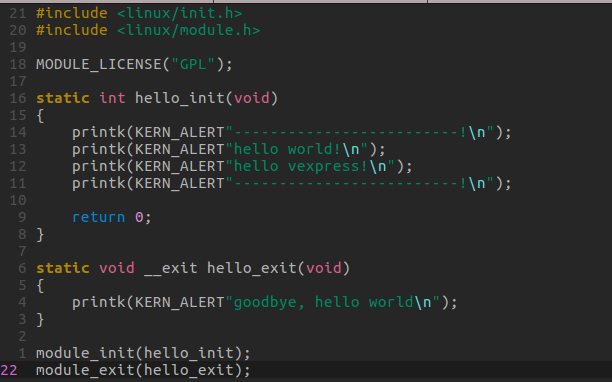
Makefile:
.PHONY:all clean
ifneq ($(KERNELRELEASE),) obj-m := hello.o else EXTRA_CFLAGS += -DDEBUG
KDIR := /home/coco/work/kernel/linux-..
all:
make CROSS_COMPILE=arm-linux-gnueabi- ARCH=arm -C $(KDIR) M=$(PWD) modules
clean:
rm -fr *.ko *.o *.mod.o *.mod.c *.symvers *.order .*.ko .tmp_versions endif
拷贝 hello.ko 进NFS文件系统:cp /home/coco/work/code/test_driver/hello.ko ./work
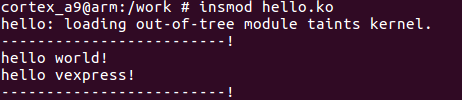
加载模块:insmod hello.ko
查看模块:lsmod

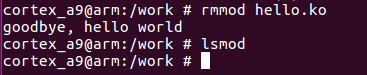
卸载模块:rmmod hello.ko
查看模块:lsmod
1.5 启动脚本
boot.sh
#!/bin/bash BOARD=vexpress-a9 KERNEL_DIR=/home/ubuntu/work/arm/kernel/linux-4.4.
KERNEL_BIN_DIR=${KERNEL_DIR}/arch/arm/boot
DTB_DIR=${KERNEL_BIN_DIR}/dts
DTB_BIN=vexpress-v2p-ca9.dtb
UIMAGE=uImage
ZIMAGE=zImage UBOOT_DIR=/home/ubuntu/work/arm/uboot/u-boot-2017.01
UBOOT_BIN_DIR=${UBOOT_DIR}
UBOOT_BIN=u-boot ROOTFS_DIR=/home/ubuntu/work/arm
ROOTFS_BIN=rootfs.ext3 TFTPBOOT_DIR=/home/ubuntu/work/arm/tftpboot help()
{
echo "-t start qemu"
echo " s; start with graphic......"
echo " s-no; start with no graphic......"
echo "-h print help"
} tftp_init()
{
echo "init...."
if [ "${TFTPBOOT_DIR}/${UIMAGE}" -ot "${KERNEL_BIN_DIR}/${UIMAGE}" -o ! -f "${TFTPBOOT_DIR}/${UIMAGE}" ]; then
echo "cp ${KERNEL_BIN_DIR}/${UIMAGE} ${TFTPBOOT_DIR}"
cp ${KERNEL_BIN_DIR}/${UIMAGE} ${TFTPBOOT_DIR}
fi if [ "${TFTPBOOT_DIR}/${DTB_BIN}" -ot "${DTB_DIR}/${DTB_BIN}" -o ! -f "${DTB_DIR}/${DTB_BIN}" ]; then
echo "cp ${DTB_DIR}/${DTB_BIN} ${TFTPBOOT_DIR}"
cp ${DTB_DIR}/${DTB_BIN} ${TFTPBOOT_DIR}
fi if [ "${TFTPBOOT_DIR}/${UBOOT_BIN}" -ot "${UBOOT_BIN_DIR}/${UBOOT_BIN}" -o ! -f "${UBOOT_BIN_DIR}/${UBOOT_BIN}" ]; then
echo "cp ${UBOOT_BIN_DIR}/${UBOOT_BIN} ${TFTPBOOT_DIR}"
cp ${UBOOT_BIN_DIR}/${UBOOT_BIN} ${TFTPBOOT_DIR}
fi if [ "${TFTPBOOT_DIR}/${ROOTFS_BIN}" -ot "${ROOTFS_DIR}/${ROOTFS_BIN}" -o ! -f "${ROOTFS_DIR}/${ROOTFS_BIN}" ]; then
echo "cp ${ROOTFS_DIR}/${ROOTFS_BIN} ${TFTPBOOT_DIR}"
cp ${ROOTFS_DIR}/${ROOTFS_BIN} ${TFTPBOOT_DIR}
fi
} tftp_start_no_graphic()
{
qemu-system-arm -M vexpress-a9 -kernel u-boot -nographic -m 512M -net nic, -net tap,ifname=tap0 -sd rootfs.ext3
} nfs_start_no_graphic()
{
qemu-system-arm -M vexpress-a9 -kernel u-boot -nographic -m 512M -net nic -net tap,ifname=tap0
} kernel_start_no_graphic()
{
qemu-system-arm \
-M ${BOARD} \
-kernel ${KERNEL_BIN_DIR}/${ZIMAGE} \
-nographic \
-m 512M \
-dtb ${DTB_DIR}/${DTB_BIN} \
-append "root=/dev/mmcblk0 rw console=ttyAMA0" \
-sd ${ROOTFS_DIR}/${ROOTFS_BIN}
} kernel_start_with_graphic()
{
qemu-system-arm \
-M ${BOARD} \
-kernel ${KERNEL_BIN_DIR}/${ZIMAGE} \
-m 512M
} uboot_start_no_graphic()
{
qemu-system-arm \
-M ${BOARD} \
-kernel ${UBOOT_BIN_DIR}/${UBOOT_BIN} \
-nographic \
-m 512M
} uboot_start_with_graphic()
{
qemu-system-arm \
-M ${BOARD} \
-kernel ${UBOOT_BIN_DIR}/${UBOOT_BIN} \
-m 512M
} while getopts "t:h" opt
do
case $opt in
t)
OPTARG_TYPE=$OPTARG
;;
h)
help
exit
;;
esac
done case "$OPTARG_TYPE" in
n-no)
tftp_init
echo "nfs start with no graphic......"
nfs_start_no_graphic $@
;;
s)
echo "tftp start with graphic......"
tftp_init
start_graphic $@
;;
s-no)
tftp_init
echo "tftp start with no graphic......"
tftp_start_no_graphic $@
;;
k)
kernel_start_with_graphic $@
;;
k-no)
kernel_start_no_graphic $@
;;
u)
uboot_start_with_graphic $@
;;
u-no)
uboot_start_no_graphic $@
;;
*)
echo "Unknow option $OPTARG_TYPE..."
exit
;;
esac
一、Linux 设备驱动介绍及开发环境搭建(续)的更多相关文章
- 一、Linux 设备驱动介绍及开发环境搭建
1.1 Linux 设备驱动介绍 1.1.1 分类及特点 计算机系统的硬件主要由 CPU.存储器和外设组成. 当前 CPU 内部都集成有存储器和外设适配器. 外设适配器有入 UART.IIC 控制器. ...
- Linux虚拟机中 Node.js 开发环境搭建
Node.js 开发环境搭建: 1.下载CentOS镜像文件和VMWare虚拟机程序; 2.安装VMWare——>添加虚拟机——>选择CentOS镜像文件即可默认安装带有桌面的Linux虚 ...
- (0)ASP.NET Core 简单介绍 和开发环境搭建 - ASP.NET从MVC5升级到MVC6
ASP.NET从MVC5升级到MVC6 总目录 ASP.NET Core 首先,ASP原本只是一种技术,这种技术从上个世纪90年代就有了. Active Service Page 和 Java Ser ...
- 1. React介绍 React开发环境搭建 React第一个程序
什么是 React React 是 Facebook 发布的 JavaScript 库,以其高性能和独特的设计理念受到了广泛关注. React的开发背景 Faceboo ...
- Eclipse rap 富客户端开发总结(1) :rap简单介绍和开发环境搭建
一.rap简单介绍 1 基本概念 RAP可以让开发人员使用JAVA API和按照Eclipse 插件的开发模式构建基于AJAX的Web 2.0应用程序, RAP的工作原理是采用交叉编译的方式将 ...
- Linux Ubuntu系统下Java开发环境搭建
操作系统:Linux x64 / Ubuntu 14.04 Java JDK版本:jdk-8u65-linux-x64.tar.gz 声明:转载请注明出处及本文链接 1. 前往ORACLE官网下载最新 ...
- LINUX下QT FOR ARM开发环境搭建过程 (使用qt-x11-opensource-src-4.5.2.tar.gz进行编译)
在PC上,我们需要得到两个版本的Qt,分别是:Qt-4.5.2和QtEmbedded-4.5.2-arm.前者包括了Qt Designer等基本工具,用于在PC上对程序的开发调试,使我们能确保程序放到 ...
- centos 7 lamp (linux+apache+mysql+php)开发环境搭建(转+原创)
准备篇:CentOS 7.0系统安装配置图解教程 http://www.jb51.net/os/188487.html 一.配置防火墙,开启80端口.3306端口 CentOS 7.0默认使用的是fi ...
- linux python 图形编程 qt开发环境搭建
我的系统是 ubuntu14.04 我们使用的是python2.7,建议安装qt4+pyqt4+eric4 eric是pyqt的界面设计器的代码生成软件. 1.安装sip 这个是python和qt之间 ...
随机推荐
- android 面试汇总<一>
1.1 Android Activity Q:说下Activity的生命周期? 技术点:Activity生命周期 思路:分条解释Activity从创建到销毁整个生命周期中涉及到的方法及作用 参考回答: ...
- sun.misc.BASE64Encoder 不建议使用java.sun自带包中的内容
import sun.misc.BASE64Decoder; 在项目中,设计到64位编码的.有时开发会用到JDK中自带的BASE64工具.但sun公司是建议不这样做的.尤其是更新了JDK版本,项目甚至 ...
- CentOS 系统安装 nodejs 及相关配置
概述 今天我在我的 AWS EC2 服务器上安装了 nodejs.没想到竟然这么麻烦,比在 windows 和 mac 上麻烦多了.所以我把心得记录下来,供以后开发时参考,相信对其他人也有用. 参考资 ...
- linux(centOS7)的基本操作(三) 用户、组、权限管理
用户和组 1.用户.组.家目录的概念 linux系统支持多用户,除了管理员,其他用户一般不应该使用root,而是应该向管理员申请一个账号.组类似于角色,系统可以通过组对有共性的用户进行统一管理.每个用 ...
- 阶段3 1.Mybatis_12.Mybatis注解开发_8 mybatis注解开发使用二级缓存
执行两次都查询userId为57的数据.测试一级缓存 返回true 新建测试类 ,测试二级缓存 二级缓存的配置 首先是全局配置,不配置其实也是可以的.默认就是开启的.这里为了演示配置上 dao类里面进 ...
- JForum论坛安装以及部署(转)
链接地址:https://www.cnblogs.com/Amos-Turing/p/7151009.html 下载JForum2.1.9 包手动放到tomcat的webapps下面, 这次打开网址: ...
- Toad oracle
CJ2PFCQ6P49Q4WHQT2D03GNTVX2AN5DG6FWD04YL4QW625KT391J9YF38VKB92SNBWNW-RU-BOARD-BD cr2384
- cosbench 安装
cosbench是什么 COSBench是Intel团队基于java开发,衡量云对象存储服务性能的基准测试工具,全称是Cloud object Storage Bench,同所有的性能测试工具一样,C ...
- python学习之数据类型(List)
3.5 列表 3.5.1 列表的介绍 列表是python的基础数据类型之⼀,其他编程语言也有类似的数据类型. 比如JS中的数组, java中的数组等等.它是以[ ]括起来, 每个元素⽤' , '隔 ...
- LeetCode.989-数组形式的整数做加法(Add to Array-Form of Integer)
这是悦乐书的第371次更新,第399篇原创 01 看题和准备 今天介绍的是LeetCode算法题中Easy级别的第233题(顺位题号是989).对于非负整数X,X的数组形式是从左到右顺序的数字数组.例 ...