洛谷 P1126 机器人搬重物
题目描述
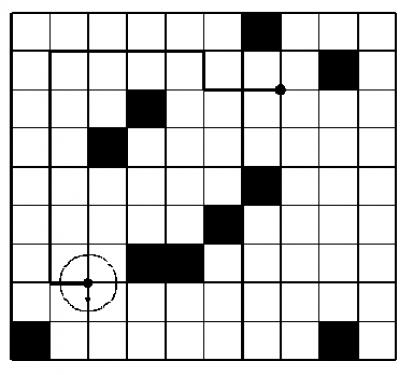
机器人移动学会(RMI)现在正尝试用机器人搬运物品。机器人的形状是一个直径 $1.6 米的球。在试验阶段,机器人被用于在一个储藏室中搬运货物。储藏室是一个 N×MN \times MN×M 的网格,有些格子为不可移动的障碍。机器人的中心总是在格点上,当然,机器人必须在最短的时间内把物品搬运到指定的地方。机器人接受的指令有:向前移动 111 步(Creep);向前移动2步(Walk);向前移动 333 步(Run);向左转(Left);向右转(Right)。每个指令所需要的时间为 111 秒。请你计算一下机器人完成任务所需的最少时间。
输入输出格式
输入格式:
第一行为两个正整数 N,M(N,M≤50)N,M(N,M \le 50)N,M(N,M≤50) ,下面 NNN 行是储藏室的构造, 000 表示无障碍, 111 表示有障碍,数字之间用一个空格隔开。接着一行有 444 个整数和 111 个大写字母,分别为起始点和目标点左上角网格的行与列,起始时的面对方向(东 EEE ,南 SSS ,西 WWW ,北 NNN ),数与数,数与字母之间均用一个空格隔开。终点的面向方向是任意的。
输出格式:
一个整数,表示机器人完成任务所需的最少时间。如果无法到达,输出 −1-1−1 。
输入输出样例
9 10
0 0 0 0 0 0 1 0 0 0
0 0 0 0 0 0 0 0 1 0
0 0 0 1 0 0 0 0 0 0
0 0 1 0 0 0 0 0 0 0
0 0 0 0 0 0 1 0 0 0
0 0 0 0 0 1 0 0 0 0
0 0 0 1 1 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0
1 0 0 0 0 0 0 0 1 0
7 2 2 7 S
12 明显是宽搜。
首先要把网格图转化为点图,
其次对于每一个状态要存储三个信息行号列号方向。
注意走两步的情况一定要注意不能越过障碍物。
#include<algorithm>
#include<iostream>
#include<cstring>
#include<climits>
#include<cstdio>
#include<queue>
#include<map>
using namespace std;
int n,m,sx,sy,dx,dy,ans=INT_MAX,c[][][],u[]={,,,-},v[]={,,-,};
bool b[][];
char dr[];
struct cll
{
int x,y,dir;
}tmp1,tmp2;
queue<cll>q;
map<char,int>mp;
int main()
{
mp['E']=,mp['S']=,mp['W']=,mp['N']=;
memset(c,-,sizeof(c));
scanf("%d%d",&n,&m);
for(int i=;i<=n;i++)
for(int j=;j<=m;j++)
{
int t;
scanf("%d",&t);
if(t==)
b[i][j]=b[i-][j]=b[i][j-]=b[i-][j-]=;
}
scanf("%d%d%d%d%s",&sx,&sy,&dx,&dy,&dr);
tmp1.x=sx,tmp1.y=sy,tmp1.dir=mp[dr[]];
q.push(tmp1);
c[sx][sy][tmp1.dir]=;
while(!q.empty())
{
tmp1=q.front();
q.pop();
for(int i=;i<=;i++)//Ç°½ø
{
tmp2.x=tmp1.x+i*u[tmp1.dir],tmp2.y=tmp1.y+i*v[tmp1.dir],tmp2.dir=tmp1.dir;
if(tmp2.x>&&tmp2.x<n&&tmp2.y>&&tmp2.y<m&&!b[tmp2.x][tmp2.y])
{
if(c[tmp2.x][tmp2.y][tmp2.dir]==-)
{
q.push(tmp2);
c[tmp2.x][tmp2.y][tmp2.dir]=c[tmp1.x][tmp1.y][tmp1.dir]+;
}
}
else
break;
}
tmp2.x=tmp1.x,tmp2.y=tmp1.y;//תÏò
tmp2.dir=(tmp1.dir+)%;
if(c[tmp2.x][tmp2.y][tmp2.dir]==-)
{
q.push(tmp2);
c[tmp2.x][tmp2.y][tmp2.dir]=c[tmp1.x][tmp1.y][tmp1.dir]+;
}
tmp2.dir=(tmp1.dir+)%;
if(c[tmp2.x][tmp2.y][tmp2.dir]==-)
{
q.push(tmp2);
c[tmp2.x][tmp2.y][tmp2.dir]=c[tmp1.x][tmp1.y][tmp1.dir]+;
}
}
for(int i=;i<=;i++)
if(c[dx][dy][i]!=-)
ans=min(ans,c[dx][dy][i]);
if(ans==INT_MAX)
printf("-1\n");
else
printf("%d\n",ans);
return ;
}
洛谷 P1126 机器人搬重物的更多相关文章
- 洛谷P1126 机器人搬重物
洛谷1126 机器人搬重物 题目描述 机器人移动学会(RMI)现在正尝试用机器人搬运物品.机器人的形状是一个直径1.6米的球.在试验阶段,机器人被用于在一个储藏室中搬运货物.储藏室是一个N*M的网格, ...
- 洛谷——P1126 机器人搬重物
P1126 机器人搬重物 题目描述 机器人移动学会(RMI)现在正尝试用机器人搬运物品.机器人的形状是一个直径1.6米的球.在试验阶段,机器人被用于在一个储藏室中搬运货物.储藏室是一个N*M的网格,有 ...
- 洛谷 P1126 机器人搬重物 (BFS)
题目链接:https://www.luogu.org/problemnew/show/P1126 吐槽:这题很阴险 一开始没把格子图转化成点图:30分 转化成点图,发现样例过不去,原来每步要判断vis ...
- 洛谷P1126 机器人搬重物【bfs】
题目链接:https://www.luogu.org/problemnew/show/P1126 题意: 给定一个n*m的方格,机器人推着直径是1.6的球在格子的线上运动. 每一秒钟可以向左转,向右转 ...
- 洛谷P1126机器人搬重物[BFS]
题目描述 机器人移动学会(RMI)现在正尝试用机器人搬运物品.机器人的形状是一个直径1.6米的球.在试验阶段,机器人被用于在一个储藏室中搬运货物.储藏室是一个N*M的网格,有些格子为不可移动的障碍.机 ...
- 洛谷—— P1126 机器人搬重物
https://www.luogu.org/problem/show?pid=1126 题目描述 机器人移动学会(RMI)现在正尝试用机器人搬运物品.机器人的形状是一个直径1.6米的球.在试验阶段,机 ...
- luogu P1126 机器人搬重物 题解
luogu P1126 机器人搬重物 题解 题目描述 机器人移动学会(\(RMI\))现在正尝试用机器人搬运物品.机器人的形状是一个直径\(1.6\)米的球.在试验阶段,机器人被用于在一个储藏室中搬运 ...
- P1126 机器人搬重物
P1126 机器人搬重物 题目描述 机器人移动学会(RMI)现在正尝试用机器人搬运物品.机器人的形状是一个直径1.6米的球.在试验阶段,机器人被用于在一个储藏室中搬运货物.储藏室是一个N*M的网格,有 ...
- luogu P1126 机器人搬重物
题目描述 机器人移动学会(RMI)现在正尝试用机器人搬运物品.机器人的形状是一个直径1.6米的球.在试验阶段,机器人被用于在一个储藏室中搬运货物.储藏室是一个N*M的网格,有些格子为不可移动的障碍.机 ...
随机推荐
- Maven项目远程部署到Tomcat
目录 Maven项目远程部署到Tomcat 一.Tomcat插件支持的目标 二.系统要求及插件引入 2.1 系统要求 2.2 引入插件 三.远程部署war到tomcat 3.1 添加tomcat管理角 ...
- Java面试MySQL的一些问题
MySQL InnoDB存储的文件结构 索引树是如何维护的? 数据库自增主键可能的问题
- Javascript 小练习
--------------------------要收获别人五年才能收获的东西,你就要做好准备,遭受别人五人所遭受的坎坷” // -------------------------------*** ...
- log4j打印堆栈信息
原文地址:https://blog.csdn.net/xianyu_0418/article/details/6043174 大家都知道,网站在运行的过程中,打印必要的log对记录网站的运行情况.从而 ...
- Quartz-Spring定时任务器持久化,通过Service动态添加,删除,启动暂停任务
原文地址:https://blog.csdn.net/ljqwstc/article/details/78257091 首先添加maven的依赖: <!--quartz定时任务--> &l ...
- 二十四、小程序中改变checkbox和radio的样式
来源:https://blog.csdn.net/qq_39364032/article/details/79742415 在微信小程序里面,有时候为了配合整个项目的风格,checkbox和radio ...
- iOS上手指点击波纹效果的实现
https://www.jianshu.com/p/35e6f53ca0fe 2016.10.19 22:00* 字数 135 阅读 2468评论 2喜欢 7 闲暇时间做了一个反馈手指点击屏幕的效果, ...
- [iOS]一行代码集成空白页面占位图(基于runtime+MJRefresh思想)
2018年01月03日阅读 2472 [iOS]一行代码集成空白页面占位图(基于runtime+MJRefresh思想) LYEmptyView 此框架是本人在5,6个月前,公司启动新项目的时候, ...
- Linux watchdog
使用 watchdog 构建高可用性的 Linux 系统及应用https://www.ibm.com/developerworks/cn/linux/l-cn-watchdog/index.html ...
- JAVAString初始化的引用问题
1 String a="Hello JAVA"; 2 3 String b=a; 4 5 System.out.println(a); 6 7 System.out.println ...