PCL—点云分割(超体聚类) 低层次点云处理
博客转载自:http://www.cnblogs.com/ironstark/p/5013968.html
1.超体聚类——一种来自图像的分割方法
超体(supervoxel)是一种集合,集合的元素是“体”。与体素滤波器中的体类似,其本质是一个个的小方块。与之前提到的所有分割手段不同,超体聚类的目的并不是分割出某种特定物体,其对点云实施过分割(over segmentation),将场景点云化成很多小块,并研究每个小块之间的关系。这种将更小单元合并的分割思路已经出现了有些年份了,在图像分割中,像素聚类形成超像素,以超像素关系来理解图像已经广为研究。本质上这种方法是对局部的一种总结,纹理,材质,颜色类似的部分会被自动的分割成一块,有利于后续识别工作。比如对人的识别,如果能将头发,面部,四肢,躯干分开,则能更好的对各种姿态,性别的人进行识别。
点云和图像不一样,其不存在像素邻接关系。所以,超体聚类之前,必须以八叉树对点云进行划分,获得不同点团之间的邻接关系。与图像相似点云的邻接关系也有很多,如面邻接,线邻接,点邻接。其具体解释如下图:
基于超体聚类的点云分割,使用点邻接(蓝色)作为相邻判据。
2.超体聚类的实现步骤
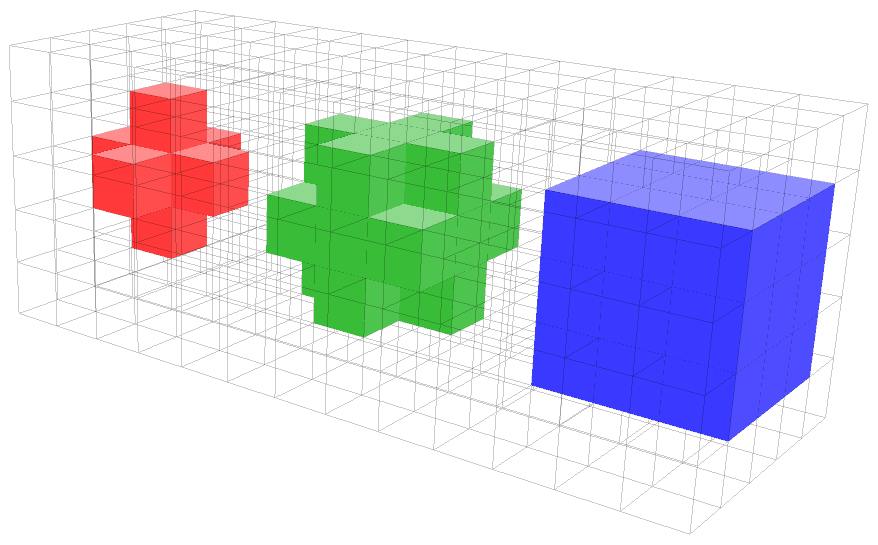
举个简单的例子来体会下超体聚类,其过程和结晶类似。但不是水结晶成冰,而是盐溶液过饱和状态下的多晶核结晶。所有的晶核(seed)同时开始生长,最终填满整个空间,使物质具有晶体结构。 超体聚类实际上是一种特殊的区域生长算法,和无限制的生长不同,超体聚类首先需要规律的布置区域生长“晶核”。晶核在空间中实际上是均匀分布的,并指定晶核距离(Rseed)。再指定粒子距离(Rvoxel)。再指定最小晶粒(MOV),过小的晶粒需要融入最近的大晶粒。关系如图所示:

有了晶粒和结晶范围之后,我们只需要控制结晶过程,就能将整个空间划分开了。结晶过程的本质就是不断吸纳类似的粒子(八分空间)。类似是一个比较模糊的概念,关于类似的定义有以下公式:
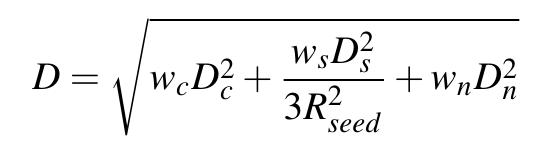
公式中的Dc,表示颜色上的差异,Dn表示法线上的差异,Ds代表点距离上的差异。w_*表示一系列权重。用于控制结晶形状。在晶核周围寻找一圈,D最小的体素被认为是下一个“被发展的党员”。需要注意的是,结晶过程并不是长完一个晶核再长下一个,二是所有的晶核同时开始生长(虽然计算机计算时必然有先后,但从层次上来说是同时的)。其生长顺序如下图所示:

接下来所有晶核继续公平竞争,发展第二个“党员”,以此循环,最终所有晶体应该几乎同时完成生长。整个点云也被晶格所分割开来。并且保证了一个晶包里的粒子都是类似的。
3.PCL对超体聚类的实现
//设定结晶参数
float voxel_resolution = 0.008f;
float seed_resolution = 0.1f;
float color_importance = 0.2f;
float spatial_importance = 0.4f;
float normal_importance = 1.0f;
//生成结晶器
pcl::SupervoxelClustering<PointT> super (voxel_resolution, seed_resolution);
//和点云形式有关
if (disable_transform)
super.setUseSingleCameraTransform (false);
//输入点云及结晶参数
super.setInputCloud (cloud);
super.setColorImportance (color_importance);
super.setSpatialImportance (spatial_importance);
super.setNormalImportance (normal_importance);
//输出结晶分割结果:结果是一个映射表
std::map <uint32_t, pcl::Supervoxel<PointT>::Ptr > supervoxel_clusters;
super.extract (supervoxel_clusters);
//获得晶体中心
PointCloudT::Ptr voxel_centroid_cloud = super.getVoxelCentroidCloud ();
//获得晶体
PointLCloudT::Ptr labeled_voxel_cloud = super.getLabeledVoxelCloud ();
执行上诉过程后,会将晶体映射成一系列数。数代表的是指向各个晶体的指针。可以通过getter函数,把晶体有关的信息拖出来。拖出来的是点云。
//将相连的晶体中心连起来并显示
std::multimap<uint32_t, uint32_t> supervoxel_adjacency;
super.getSupervoxelAdjacency (supervoxel_adjacency);
std::multimap<uint32_t,uint32_t>::iterator label_itr = supervoxel_adjacency.begin ();
for ( ; label_itr != supervoxel_adjacency.end (); )
{
//First get the label
uint32_t supervoxel_label = label_itr->first;
//Now get the supervoxel corresponding to the label
pcl::Supervoxel<PointT>::Ptr supervoxel = supervoxel_clusters.at (supervoxel_label);
//Now we need to iterate through the adjacent supervoxels and make a point cloud of them
PointCloudT adjacent_supervoxel_centers;
std::multimap<uint32_t,uint32_t>::iterator adjacent_itr = supervoxel_adjacency.equal_range (supervoxel_label).first;
for ( ; adjacent_itr!=supervoxel_adjacency.equal_range (supervoxel_label).second; ++adjacent_itr)
{
pcl::Supervoxel<PointT>::Ptr neighbor_supervoxel = supervoxel_clusters.at (adjacent_itr->second);
adjacent_supervoxel_centers.push_back (neighbor_supervoxel->centroid_);
}
//Now we make a name for this polygon
std::stringstream ss;
ss << "supervoxel_" << supervoxel_label;
//This function is shown below, but is beyond the scope of this tutorial - basically it just generates a "star" polygon mesh from the points given
addSupervoxelConnectionsToViewer (supervoxel->centroid_, adjacent_supervoxel_centers, ss.str (), viewer);
//Move iterator forward to next label
label_itr = supervoxel_adjacency.upper_bound (supervoxel_label);
}
至此,生成了不同的晶体之间的邻接关系。结果如下所示(不同晶核距离0.1m,0.05m)
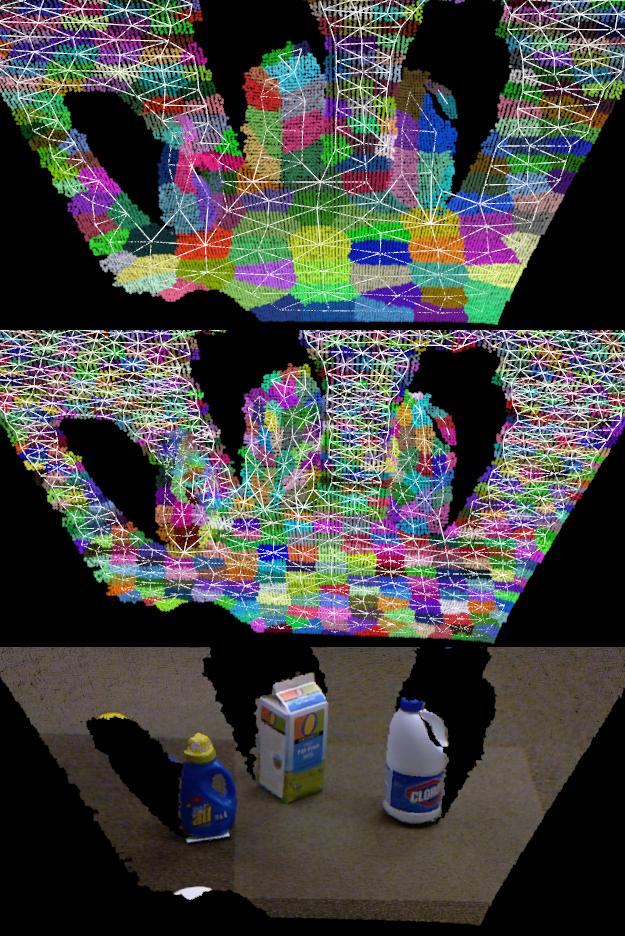
此方法主要为识别做前期准备,但我认为,这种东西用在三维视觉+有限元倒是极好的。可以在不使用应变片的前提下对物体各个部分应变进行直接测量。在已知力的情况下可以建立物体刚度和应变的关系,貌似钢包回转台的手里分析可以这样解决。蛋疼的是实际工业机械哪有那么多花花绿绿的给你分割,很难形成有效的对应点匹配。
PCL—点云分割(超体聚类) 低层次点云处理的更多相关文章
- PCL—关键点检测(rangeImage)低层次点云处理
博客转载自:http://www.cnblogs.com/ironstark/p/5046479.html 关键点又称为感兴趣的点,是低层次视觉通往高层次视觉的捷径,抑或是高层次感知对低层次处理手段的 ...
- PCL—关键点检测(Harris)低层次点云处理
博客转载自:http://www.cnblogs.com/ironstark/p/5064848.html 除去NARF这种和特征检测联系比较紧密的方法外,一般来说特征检测都会对曲率变化比较剧烈的点更 ...
- PCL—关键点检测(NARF)低层次点云处理
博客转载自:http://www.cnblogs.com/ironstark/p/5051533.html 关键点检测本质上来说,并不是一个独立的部分,它往往和特征描述联系在一起,再将特征描述和识别. ...
- PCL—点云分割(基于凹凸性) 低层次点云处理
博客转载自:http://www.cnblogs.com/ironstark/p/5027269.html 1.图像分割的两条思路 场景分割时机器视觉中的重要任务,尤其对家庭机器人而言,优秀的场景分割 ...
- PCL—点云分割(基于形态学) 低层次点云处理
博客转载自:http://www.cnblogs.com/ironstark/p/5017428.html 1.航空测量与点云的形态学 航空测量是对地形地貌进行测量的一种高效手段.生成地形三维形貌一直 ...
- PCL—点云分割(最小割算法) 低层次点云处理
1.点云分割的精度 在之前的两个章节里介绍了基于采样一致的点云分割和基于临近搜索的点云分割算法.基于采样一致的点云分割算法显然是意识流的,它只能割出大概的点云(可能是杯子的一部分,但杯把儿肯定没分割出 ...
- PCL—点云分割(邻近信息) 低层次点云处理
博客转载自:http://www.cnblogs.com/ironstark/p/5000147.html 分割给人最直观的影响大概就是邻居和我不一样.比如某条界线这边是中华文明,界线那边是西方文,最 ...
- PCL—点云分割(RanSaC)低层次点云处理
博客转载自:http://blog.csdn.net/app_12062011/article/details/78131318 点云分割 点云分割可谓点云处理的精髓,也是三维图像相对二维图像最大优势 ...
- PCL—点云滤波(基于点云频率) 低层次点云处理
博客转载自:http://www.cnblogs.com/ironstark/p/5010771.html 1.点云的频率 今天在阅读分割有关的文献时,惊喜的发现,点云和图像一样,有可能也存在频率的概 ...
随机推荐
- selenium-webdirver api-定位方式
1,8种单数定位方式 # 通过ID定位目标元素 driver.find_element_by_id('i1') # 通过className定位目标元素 driver.find_element_by_c ...
- 原生MapReduce开发样例
一.需求 data: 将相同名字合并为一个,并计算出平均数 tom 小明 jerry 2哈 tom tom 小明 二.编码 1.导入jar包 2.编码 2.1Map编写 package com.wzy ...
- XML DOM - Range 对象
Range对象 Range对象表示文档的连续范围区域,如用户在浏览器窗口中用鼠标拖动选中的区域. dom标准Range对象 在IE中使用TextRange对象 range对象常用的建立方法在开发中 ...
- C8051F340 USB0 寄存器访问
/*************************************************************************** * C8051F340 USB0 寄存器访问 ...
- 从内存中直接运行PE程序
效果是这样的,假设一个PE数据在内存里面了,我们利用下面我讲的技术可以直接建立一个进程并运行这个PE,当然直接在本进程运行在可以,这两钟技术在前些时日我都有实现,今天我只说关于建立进程并运行的,当然, ...
- BZOJ2716:[Violet 3]天使玩偶
浅谈离线分治算法:https://www.cnblogs.com/AKMer/p/10415556.html 题目传送门:https://lydsy.com/JudgeOnline/problem.p ...
- 9.Selenium+HTMLTestRunner无法生成测试报告(Pycharm)
1.若编辑器为Pycharm,代码无任何错误,且运行成功,但是无法生成测试报告,原因如下:(本质是编辑器原因) 若光标在如图位置,右键显示为“run 'unittest in XX'”,若是显示这种, ...
- 异常:java.lang.IllegalStateException: No instances found of configserver(里面是一个微服务名)
今天本地测试代码时出现了个异常,该异常出现的原因是:微服务启动的顺序出现了问题: 应该先启动本地eureka,然后在启动本地配置中心,然后在启动具体的微服务.
- jQuery中 :first、:first-child 和 :first-of-type 之间的不同
<!DOCTYPE html><html><head><meta charset="utf-8"><script src=&q ...
- linux user date
useradd username 添加用户 userdel username 删除用户 passwd username 设置用户密码 passwd 设置当前用户密码 passwd -d usernam ...