Pytorch入门下 —— 其他
本节内容参照小土堆的pytorch入门视频教程。
现有模型使用和修改
pytorch框架提供了很多现有模型,其中torchvision.models包中有很多关于视觉(图像)领域的模型,如下图:

下面以VGG16为例将讲解如何使用以及更改现有模型:
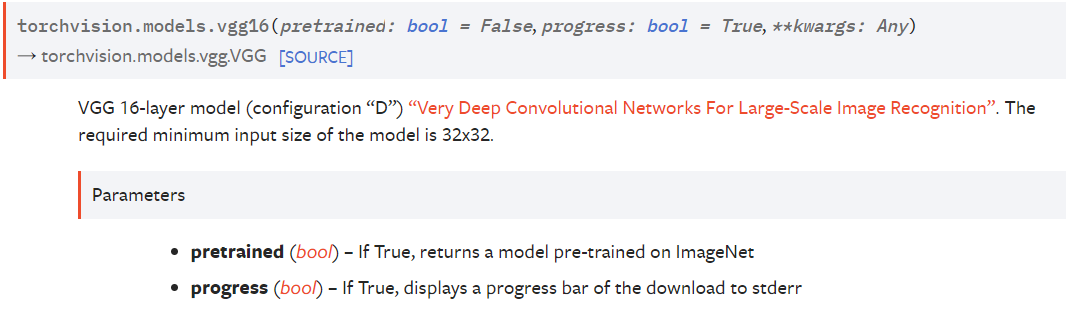
pretrained为True,返回在ImageNet上预训练过的模型;pregress为True在下载模型时会通过标准错误流输出进度条。
创建如下脚本并运行:
from torchvision import models
# 创建预训练过的模型,并输出进度
vgg16_pretrained = models.vgg16(pretrained=True, progress=True)
# 创建没训练过的模型,不输出进度
vgg16 = models.vgg16(pretrained=False, progress=False)
# 控制台输出模型结构
print(vgg16_pretrained)
控制台输出如下:
Downloading: "https://download.pytorch.org/models/vgg16-397923af.pth" to C:\Users\winlsr/.cache\torch\hub\checkpoints\vgg16-397923af.pth
100.0%
VGG(
(features): Sequential(
(0): Conv2d(3, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): ReLU(inplace=True)
(2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(3): ReLU(inplace=True)
(4): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(5): Conv2d(64, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(6): ReLU(inplace=True)
(7): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(8): ReLU(inplace=True)
(9): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(10): Conv2d(128, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(11): ReLU(inplace=True)
(12): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(13): ReLU(inplace=True)
(14): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(15): ReLU(inplace=True)
(16): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(17): Conv2d(256, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(18): ReLU(inplace=True)
(19): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(20): ReLU(inplace=True)
(21): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(22): ReLU(inplace=True)
(23): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(24): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(25): ReLU(inplace=True)
(26): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(27): ReLU(inplace=True)
(28): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(29): ReLU(inplace=True)
(30): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
)
(avgpool): AdaptiveAvgPool2d(output_size=(7, 7))
(classifier): Sequential(
(0): Linear(in_features=25088, out_features=4096, bias=True)
(1): ReLU(inplace=True)
(2): Dropout(p=0.5, inplace=False)
(3): Linear(in_features=4096, out_features=4096, bias=True)
(4): ReLU(inplace=True)
(5): Dropout(p=0.5, inplace=False)
(6): Linear(in_features=4096, out_features=1000, bias=True)
)
)
如上输出中的的VGG表示模型的class名,features是VGG含有的一个Sequential组件(Module),avgpool是AdaptiveAvgPool2d组件,classifier同样为Sequential组件。
创建如下脚本并运行:
from torchvision import models
from torch import nn
# 创建预训练过的模型,并输出进度
vgg16_pretrained = models.vgg16(pretrained=True, progress=True)
# 创建没训练过的模型,不输出进度
vgg16 = models.vgg16(pretrained=False, progress=False)
# 给vgg添加一个线性Module(层)
vgg16_pretrained.add_module("linear", nn.Linear(1000, 10))
# 控制台输出模型结构
print(vgg16_pretrained)
输出如下:
VGG(
(features): Sequential(
(0): Conv2d(3, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): ReLU(inplace=True)
(2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(3): ReLU(inplace=True)
(4): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(5): Conv2d(64, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(6): ReLU(inplace=True)
(7): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(8): ReLU(inplace=True)
(9): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(10): Conv2d(128, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(11): ReLU(inplace=True)
(12): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(13): ReLU(inplace=True)
(14): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(15): ReLU(inplace=True)
(16): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(17): Conv2d(256, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(18): ReLU(inplace=True)
(19): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(20): ReLU(inplace=True)
(21): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(22): ReLU(inplace=True)
(23): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(24): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(25): ReLU(inplace=True)
(26): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(27): ReLU(inplace=True)
(28): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(29): ReLU(inplace=True)
(30): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
)
(avgpool): AdaptiveAvgPool2d(output_size=(7, 7))
(classifier): Sequential(
(0): Linear(in_features=25088, out_features=4096, bias=True)
(1): ReLU(inplace=True)
(2): Dropout(p=0.5, inplace=False)
(3): Linear(in_features=4096, out_features=4096, bias=True)
(4): ReLU(inplace=True)
(5): Dropout(p=0.5, inplace=False)
(6): Linear(in_features=4096, out_features=1000, bias=True)
)
(linear): Linear(in_features=1000, out_features=10, bias=True) # 添加成功
)
创建如下脚本并运行:
from torchvision import models
from torch import nn
# 创建预训练过的模型,并输出进度
vgg16_pretrained = models.vgg16(pretrained=True, progress=True)
# 创建没训练过的模型,不输出进度
vgg16 = models.vgg16(pretrained=False, progress=False)
# 删除 features 组件
del vgg16_pretrained.features
# 在 classifier 组件中添加组件
vgg16_pretrained.classifier.add_module("7", nn.Linear(1000, 10))
# 修改 classifier 组件中的第1个组件为 softmax(0开始)
vgg16_pretrained.classifier[1] = nn.Softmax()
# 控制台输出模型结构
print(vgg16_pretrained)
输出如下:
VGG(
# 删除features成功
(avgpool): AdaptiveAvgPool2d(output_size=(7, 7))
(classifier): Sequential(
(0): Linear(in_features=25088, out_features=4096, bias=True)
# 修改为softmax成功
(1): Softmax(dim=None)
(2): Dropout(p=0.5, inplace=False)
(3): Linear(in_features=4096, out_features=4096, bias=True)
(4): ReLU(inplace=True)
(5): Dropout(p=0.5, inplace=False)
(6): Linear(in_features=4096, out_features=1000, bias=True)
# 添加成功
(7): Linear(in_features=1000, out_features=10, bias=True)
)
)
模型的保存与读取
pytorch中有两种模型保存和读取方式:
执行如下脚本:
from _07_cifar10_model.cifar10_model import MyModel
import torch
cifar10_model = MyModel()
# 方式1:保存 模型 + 参数
torch.save(cifar10_model, "cifar10_model.pth")
# 方式2:只保存 参数(官方推荐)
torch.save(cifar10_model.state_dict(), "cifar10_model_state_dict.pth")
执行成功后,脚本文件所在目录会生成:cifar10_model.pth、cifar10_model_state_dict.pth两个文件。
恢复方式1保存的模型:
import torch
# 方式1
cifar10_model = torch.load("cifar10_model.pth")
print(cifar10_model)
输出如下:
MyModel(
(model): Sequential(
(0): Conv2d(3, 32, kernel_size=(5, 5), stride=(1, 1), padding=(2, 2))
(1): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(2): Conv2d(32, 32, kernel_size=(5, 5), stride=(1, 1), padding=(2, 2))
(3): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(4): Conv2d(32, 64, kernel_size=(5, 5), stride=(1, 1), padding=(2, 2))
(5): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(6): Flatten(start_dim=1, end_dim=-1)
(7): Linear(in_features=1024, out_features=64, bias=True)
(8): Linear(in_features=64, out_features=10, bias=True)
)
)
恢复方式2保存的模型(官方推荐):
import torch
from _07_cifar10_model.cifar10_model import MyModel
# 方式2(官方推荐)
cifar10_model = MyModel()
cifar10_model.load_state_dict(torch.load("cifar10_model_state_dict.pth"))
print(cifar10_model)
输出如下:
MyModel(
(model): Sequential(
(0): Conv2d(3, 32, kernel_size=(5, 5), stride=(1, 1), padding=(2, 2))
(1): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(2): Conv2d(32, 32, kernel_size=(5, 5), stride=(1, 1), padding=(2, 2))
(3): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(4): Conv2d(32, 64, kernel_size=(5, 5), stride=(1, 1), padding=(2, 2))
(5): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(6): Flatten(start_dim=1, end_dim=-1)
(7): Linear(in_features=1024, out_features=64, bias=True)
(8): Linear(in_features=64, out_features=10, bias=True)
)
)
模型的完整训练套路
前面我们虽然搭建了在CIFAR10数据集上的分类模型,但是我们并没有对模型进行完整的训练。下面会对我们的模型进行一个完整的训练。训练代码如下:
import time
from torch.utils import tensorboard
from torch.utils.data import DataLoader
from _07_cifar10_model.cifar10_model import MyModel
import torchvision
import torch.nn
if __name__ == "__main__":
start_time = time.time()
# 准备训练数据集和测试数据集
transform = torchvision.transforms.Compose({
torchvision.transforms.ToTensor()
})
train_data = torchvision.datasets.CIFAR10("./dataset", train=True,
transform=transform,
download=True)
test_data = torchvision.datasets.CIFAR10("./dataset", train=False,
transform=transform,
download=True)
train_data_len = len(train_data)
test_data_len = len(test_data)
print("训练集的长度: {}".format(train_data_len))
print("测试集的长度: {}".format(test_data_len))
# 创建训练集和测试集的dataloader
train_dataloader = DataLoader(dataset=train_data, batch_size=64,
shuffle=True,
num_workers=16)
test_dataloader = DataLoader(dataset=test_data, batch_size=64,
shuffle=True,
num_workers=16)
# 创建网络
cifar10_model = MyModel()
# 创建损失函数
loss_func = torch.nn.CrossEntropyLoss()
# 创建优化器
# 学习率,科学计数的形式方便改动
learning_rate = 1e-2
optimizer = torch.optim.SGD(cifar10_model.parameters(), lr=learning_rate)
# 训练次数
total_train_step = 0
# 训练轮次
epoch = 20
# 创建 tensorboard SummaryWriter
writer = tensorboard.SummaryWriter("logs")
for i in range(epoch):
print("----------第 {} 轮训练开始-----------".format(i))
# 模型进入训练模式,该方法在当前模型可有可无(加上是个好习惯)
cifar10_model.train()
for data in train_dataloader:
images, targets = data
outputs = cifar10_model(images)
loss = loss_func(outputs, targets)
# 清空上一轮计算的梯度
optimizer.zero_grad()
# 反向传播计算梯度
loss.backward()
# 优化器优化参数(执行梯度下降)
optimizer.step()
total_train_step += 1
writer.add_scalar("train/Loss", loss.item(), total_train_step)
if total_train_step % 100 == 0:
print("训练次数: {}, Loss: {}".
format(total_train_step, loss.item()))
total_test_loss = 0.0
total_accuracy = 0.0
# 每轮 epoch 后计算模型在测试集上的loss表现
# 测试时无需计算梯度,可加快计算速度
# 模型进入验证(测试)模式,该方法在当前模型可有可无(加上是个好习惯)
cifar10_model.eval()
with torch.no_grad():
for data in test_dataloader:
images, targets = data
outputs = cifar10_model(images)
loss = loss_func(outputs, targets)
total_test_loss += loss.item()
accuracy = (outputs.argmax(1) == targets).sum()
total_accuracy += accuracy
print("测试准确率:{}".format(total_accuracy/test_data_len))
writer.add_scalar("test/Loss", total_test_loss, i)
writer.add_scalar("test/accuracy", total_accuracy/test_data_len, i)
# 保存每轮训练后的模型
torch.save(cifar10_model.state_dict(),
"cifar10_model_state_dict_{}_epoch.pth".format(i))
writer.close()
end_time = time.time()
print("耗时:{}".format(end_time - start_time))
如上代码中调用模型的train()和eval()方法主要是对模型中的Dropout、BatchNorm等Module有用(如果存在),官方解释如下:


tensorboard可视化结果如下:

利用GPU训练
没有GPU的同学可以想办法使用google colab,他提供了免费的GPU使用时长,使用起来和jupyter notebook很像。
利用GPU训练很简单:
方式一:.cuda()
只需要对 网络模型、数据(输入、标注)、损失函数调用.cuda()方法:
import time
from torch.utils import tensorboard
from torch.utils.data import DataLoader
from _07_cifar10_model.cifar10_model import MyModel
import torchvision
import torch.nn
if __name__ == "__main__":
start_time = time.time()
# 准备训练数据集和测试数据集
transform = torchvision.transforms.Compose({
torchvision.transforms.ToTensor()
})
train_data = torchvision.datasets.CIFAR10("./dataset", train=True,
transform=transform,
download=True)
test_data = torchvision.datasets.CIFAR10("./dataset", train=False,
transform=transform,
download=True)
train_data_len = len(train_data)
test_data_len = len(test_data)
print("训练集的长度: {}".format(train_data_len))
print("测试集的长度: {}".format(test_data_len))
# 创建训练集和测试集的dataloader
train_dataloader = DataLoader(dataset=train_data, batch_size=64,
shuffle=True,
num_workers=16)
test_dataloader = DataLoader(dataset=test_data, batch_size=64,
shuffle=True,
num_workers=16)
# 创建网络
cifar10_model = MyModel()
if torch.cuda.is_available():
cifar10_model = cifar10_model.cuda()
# 创建损失函数
loss_func = torch.nn.CrossEntropyLoss()
if torch.cuda.is_available():
loss_func = loss_func.cuda()
# 创建优化器
# 学习率,科学计数的形式方便改动
learning_rate = 1e-2
optimizer = torch.optim.SGD(cifar10_model.parameters(), lr=learning_rate)
# 训练次数
total_train_step = 0
# 训练轮次
epoch = 20
# 创建 tensorboard SummaryWriter
writer = tensorboard.SummaryWriter("logs")
for i in range(epoch):
print("----------第 {} 轮训练开始-----------".format(i))
# 模型进入训练模式,该方法在当前模型可有可无(加上是个好习惯)
cifar10_model.train()
for data in train_dataloader:
images, targets = data
if torch.cuda.is_available():
images = images.cuda()
targets = targets.cuda()
outputs = cifar10_model(images)
loss = loss_func(outputs, targets)
# 清空上一轮计算的梯度
optimizer.zero_grad()
# 反向传播计算梯度
loss.backward()
# 优化器优化参数(执行梯度下降)
optimizer.step()
total_train_step += 1
writer.add_scalar("train/Loss", loss.item(), total_train_step)
if total_train_step % 100 == 0:
print("训练次数: {}, Loss: {}".
format(total_train_step, loss.item()))
total_test_loss = 0.0
total_accuracy = 0.0
# 每轮 epoch 后计算模型在测试集上的loss表现
# 测试时无需计算梯度,可加快计算速度
# 模型进入验证(测试)模式,该方法在当前模型可有可无(加上是个好习惯)
cifar10_model.eval()
with torch.no_grad():
for data in test_dataloader:
images, targets = data
if torch.cuda.is_available():
images = images.cuda()
targets = targets.cuda()
outputs = cifar10_model(images)
loss = loss_func(outputs, targets)
total_test_loss += loss.item()
accuracy = (outputs.argmax(1) == targets).sum()
total_accuracy += accuracy
print("测试准确率:{}".format(total_accuracy/test_data_len))
writer.add_scalar("test/Loss", total_test_loss, i)
writer.add_scalar("test/accuracy", total_accuracy/test_data_len, i)
# 保存每轮训练后的模型
torch.save(cifar10_model.state_dict(),
"cifar10_model_state_dict_{}_epoch.pth".format(i))
writer.close()
end_time = time.time()
print("耗时:{}".format(end_time - start_time))
方式二:.to()
对 网络模型、数据(输入、标注)、损失函数调用.to()方法,方法中传入torch.device()对象。这种方式的好处在于不但可以使用GPU,还可以在有多块GPU时指定使用某块GPU。
如下:
# cpu
CPU_device = torch.device("cpu")
# gpu 只有一块显卡无需指明使用第几块
GPU_device = torch.device("cuda")
# 第0块 gpu
GPU_0_device = torch.device("cuda:0")
完整代码如下:
import time
from torch.utils import tensorboard
from torch.utils.data import DataLoader
from _07_cifar10_model.cifar10_model import MyModel
import torchvision
import torch.nn
if __name__ == "__main__":
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
start_time = time.time()
# 准备训练数据集和测试数据集
transform = torchvision.transforms.Compose({
torchvision.transforms.ToTensor()
})
train_data = torchvision.datasets.CIFAR10("./dataset", train=True,
transform=transform,
download=True)
test_data = torchvision.datasets.CIFAR10("./dataset", train=False,
transform=transform,
download=True)
train_data_len = len(train_data)
test_data_len = len(test_data)
print("训练集的长度: {}".format(train_data_len))
print("测试集的长度: {}".format(test_data_len))
# 创建训练集和测试集的dataloader
train_dataloader = DataLoader(dataset=train_data, batch_size=64,
shuffle=True,
num_workers=16)
test_dataloader = DataLoader(dataset=test_data, batch_size=64,
shuffle=True,
num_workers=16)
# 创建网络
cifar10_model = MyModel()
cifar10_model = cifar10_model.to(device)
# if torch.cuda.is_available():
# cifar10_model = cifar10_model.cuda()
# 创建损失函数
loss_func = torch.nn.CrossEntropyLoss()
loss_func = loss_func.to(device)
# if torch.cuda.is_available():
# loss_func = loss_func.cuda()
# 创建优化器
# 学习率,科学计数的形式方便改动
learning_rate = 1e-2
optimizer = torch.optim.SGD(cifar10_model.parameters(), lr=learning_rate)
# 训练次数
total_train_step = 0
# 训练轮次
epoch = 20
# 创建 tensorboard SummaryWriter
writer = tensorboard.SummaryWriter("logs")
for i in range(epoch):
print("----------第 {} 轮训练开始-----------".format(i))
# 模型进入训练模式,该方法在当前模型可有可无(加上是个好习惯)
cifar10_model.train()
for data in train_dataloader:
images, targets = data
images = images.to(device)
targets = targets.to(device)
# if torch.cuda.is_available():
# images = images.cuda()
# targets = targets.cuda()
outputs = cifar10_model(images)
loss = loss_func(outputs, targets)
# 清空上一轮计算的梯度
optimizer.zero_grad()
# 反向传播计算梯度
loss.backward()
# 优化器优化参数(执行梯度下降)
optimizer.step()
total_train_step += 1
writer.add_scalar("train/Loss", loss.item(), total_train_step)
if total_train_step % 100 == 0:
print("训练次数: {}, Loss: {}".
format(total_train_step, loss.item()))
total_test_loss = 0.0
total_accuracy = 0.0
# 每轮 epoch 后计算模型在测试集上的loss表现
# 测试时无需计算梯度,可加快计算速度
# 模型进入验证(测试)模式,该方法在当前模型可有可无(加上是个好习惯)
cifar10_model.eval()
with torch.no_grad():
for data in test_dataloader:
images, targets = data
images = images.to(device)
targets = targets.to(device)
# if torch.cuda.is_available():
# images = images.cuda()
# targets = targets.cuda()
outputs = cifar10_model(images)
loss = loss_func(outputs, targets)
total_test_loss += loss.item()
accuracy = (outputs.argmax(1) == targets).sum()
total_accuracy += accuracy
print("测试准确率:{}".format(total_accuracy/test_data_len))
writer.add_scalar("test/Loss", total_test_loss, i)
writer.add_scalar("test/accuracy", total_accuracy/test_data_len, i)
# 保存每轮训练后的模型
torch.save(cifar10_model.state_dict(),
"cifar10_model_state_dict_{}_epoch.pth".format(i))
writer.close()
end_time = time.time()
print("耗时:{}".format(end_time - start_time))
模型验证
前面的小节中,我们已经将模型训练好了,且保存了每轮训练后的模型参数。现在我们选择一个在测试集上表现最好的模型进行恢复,然后在网上随便找些图片,看我们的模型能否分类正确。根据tensorboard的显示,表现最好的模型是在第18轮训练后的模型,能达到65%左右的正确率。预测图片如下:


根据CIFAR10数据集中定义,dog的target为5,airplane的target为0:

预测代码如下:
import torch
from PIL import Image
import torchvision
from _07_cifar10_model.cifar10_model import MyModel
dog_img_path = "dog.png"
airplane_img_path = "airplane.png"
dog_img_PIL = Image.open(dog_img_path)
airplane_img_PIL = Image.open(airplane_img_path)
# 将4通道RGBA转成3通道RGB
dog_img_PIL = dog_img_PIL.convert("RGB")
airplane_img_PIL = airplane_img_PIL.convert("RGB")
transform = torchvision.transforms.Compose([
torchvision.transforms.Resize((32, 32)),
torchvision.transforms.ToTensor()
])
dog_img_tensor = transform(dog_img_PIL)
airplane_img_tensor = transform(airplane_img_PIL)
# print(dog_img_tensor.shape)
dog_img_tensor = torch.reshape(dog_img_tensor, (-1, 3, 32, 32))
airplane_img_tensor = torch.reshape(airplane_img_tensor, (1, 3, 32, 32))
cifar10_model = MyModel()
cifar10_model.load_state_dict(torch.load(
"../_10_train_model/cifar10_model_state_dict_18_epoch.pth"))
cifar10_model.eval()
with torch.no_grad():
output = cifar10_model(dog_img_tensor)
print(output.argmax(1))
output = cifar10_model(airplane_img_tensor)
print(output.argmax(1))
输出如下:
tensor([7]) # 预测错误
tensor([0]) # 预测正确
Pytorch入门下 —— 其他的更多相关文章
- Pytorch入门随手记
Pytorch入门随手记 什么是Pytorch? Pytorch是Torch到Python上的移植(Torch原本是用Lua语言编写的) 是一个动态的过程,数据和图是一起建立的. tensor.dot ...
- pytorch入门2.2构建回归模型初体验(开始训练)
pytorch入门2.x构建回归模型系列: pytorch入门2.0构建回归模型初体验(数据生成) pytorch入门2.1构建回归模型初体验(模型构建) pytorch入门2.2构建回归模型初体验( ...
- pytorch入门2.1构建回归模型初体验(模型构建)
pytorch入门2.x构建回归模型系列: pytorch入门2.0构建回归模型初体验(数据生成) pytorch入门2.1构建回归模型初体验(模型构建) pytorch入门2.2构建回归模型初体验( ...
- Pytorch入门——手把手教你MNIST手写数字识别
MNIST手写数字识别教程 要开始带组内的小朋友了,特意出一个Pytorch教程来指导一下 [!] 这里是实战教程,默认读者已经学会了部分深度学习原理,若有不懂的地方可以先停下来查查资料 目录 MNI ...
- Pytorch入门上 —— Dataset、Tensorboard、Transforms、Dataloader
本节内容参照小土堆的pytorch入门视频教程.学习时建议多读源码,通过源码中的注释可以快速弄清楚类或函数的作用以及输入输出类型. Dataset 借用Dataset可以快速访问深度学习需要的数据,例 ...
- Pytorch入门中 —— 搭建网络模型
本节内容参照小土堆的pytorch入门视频教程,主要通过查询文档的方式讲解如何搭建卷积神经网络.学习时要学会查询文档,这样会比直接搜索良莠不齐的博客更快.更可靠.讲解的内容主要是pytorch核心包中 ...
- [pytorch] Pytorch入门
Pytorch入门 简单容易上手,感觉比keras好理解多了,和mxnet很像(似乎mxnet有点借鉴pytorch),记一记. 直接从例子开始学,基础知识咱已经看了很多论文了... import t ...
- pytorch 入门指南
两类深度学习框架的优缺点 动态图(PyTorch) 计算图的进行与代码的运行时同时进行的. 静态图(Tensorflow <2.0) 自建命名体系 自建时序控制 难以介入 使用深度学习框架的优点 ...
- 超简单!pytorch入门教程(五):训练和测试CNN
我们按照超简单!pytorch入门教程(四):准备图片数据集准备好了图片数据以后,就来训练一下识别这10类图片的cnn神经网络吧. 按照超简单!pytorch入门教程(三):构造一个小型CNN构建好一 ...
随机推荐
- mybatis判断集合长度
使用mybatis框架在写sql的时候碰到一个异常: 1064 - You have an error in your SQL syntax; check the manual that corres ...
- tomcat指定特定版本的jdk
我是通过修改两个文件: setclasspath.bat和catalina.bat文件 linux在文件开头各自加上 export JAVA_HOME=/home/jdk/Java\jdk7\jdk1 ...
- MySQL的B+树索引和hash索引的区别
简述一下索引: 索引是数据库表中一列或多列的值进行排序的一种数据结构:索引分为聚集索引和非聚集索引,聚集索引查询类似书的目录,快速定位查找的数据,非聚集索引查询一般需要再次回表查询一次,如果不使用索引 ...
- FFT/NTT复习笔记&多项式&生成函数学习笔记Ⅰ
众所周知,tzc 在 2019 年(12 月 31 日)就第一次开始接触多项式相关算法,可到 2021 年(1 月 1 日)才开始写这篇 blog. 感觉自己开了个大坑( 多项式 多项式乘法 好吧这个 ...
- 贪心/构造/DP 杂题选做Ⅲ
颓!颓!颓!(bushi 前传: 贪心/构造/DP 杂题选做 贪心/构造/DP 杂题选做Ⅱ 51. CF758E Broken Tree 讲个笑话,这道题是 11.3 模拟赛的 T2,模拟赛里那道题的 ...
- [USACO07MAR]Face The Right Way G
发现选定一个长度后,怎么翻转是固定的. 那我们直接选定一个长度去操作就行. 优化操作过程 类似于堆里打持久化标记一样的感觉. [USACO07MAR]Face The Right Way G // P ...
- Codeforces 446C - DZY Loves Fibonacci Numbers(斐波那契数列+线段树)
Codeforces 题目传送门 & 洛谷题目传送门 你可能会疑惑我为什么要写 *2400 的题的题解 首先一个很明显的想法是,看到斐波那契数列和 \(10^9+9\) 就想到通项公式,\(F ...
- annovar 注释除人类以外的SNP
1. 准备文件: ref.fa ref.gtf或者gff3,最好是gtf3,可将gff3转化为gtf sample.vcf 2. 用gff3ToGenePred与gtfToGenePred工具将gtf ...
- Atom编辑器速查
简介 Atom 是 Github 开源的文本编辑器,相当于半个IDE.其特点如下: (1)免费开源,多平台支持(Windows.Mac.Linux): (2)界面美观.现代化,使用舒适: (3)多文件 ...
- 56-Remove Linked List Elements
Remove Linked List Elements My Submissions QuestionEditorial Solution Total Accepted: 61924 Total Su ...