ROS中发布IMU传感器消息
下面使用SYD Dynamics的9轴AHRS(Attitude and heading reference system),来发布sensor_msgs/Imu类型的消息。

将传感器用USB转串口接到Ubuntu系统上,可以用如下命令查看串口信息:
ls -l /dev/tty*
查询出串口名为“/dev/ttyUSB0”。根据官方给的传感器程序源文件和boost::asio库来实现串口发送request指令,并读取传感器返回的四元数信息。之后将其发送到/IMU_data的话题上:
// Step 1: Include Library Headers:
#include "EasyObjectDictionary.h"
#include "EasyProfile.h" #include <ros/ros.h>
#include <sensor_msgs/Imu.h> #include <boost/asio.hpp> // 包含boost库函数
#include <boost/bind.hpp>
using namespace boost::asio;
int main(int argc, char** argv)
{
// Step 2: Initialization:
EasyProfile_C_Interface_Init(); ros::init(argc, argv, "imu");
ros::NodeHandle n; ros::Publisher IMU_pub = n.advertise<sensor_msgs::Imu>("IMU_data", ); io_service io;
serial_port sp(io, "/dev/ttyUSB0"); // 定义传输的串口
sp.set_option(serial_port::baud_rate()); // 波特率
sp.set_option( serial_port::flow_control( serial_port::flow_control::none ) ); // 流量控制
sp.set_option( serial_port::parity( serial_port::parity::none ) ); // 奇偶校验
sp.set_option( serial_port::stop_bits( serial_port::stop_bits::one ) ); // 停止位
sp.set_option( serial_port::character_size( ) ); // 数据位 ros::Rate loop_rate();
while(ros::ok())
{
// Step 3 and Step 4 are optional, only if you want to use the request-response communication pattern
// Step 3: Request quaternion Data from TransdcuerM
uint16 toId = ; // Node ID
char* txData;
int txSize;
if(EP_SUCC_ == EasyProfile_C_Interface_TX_Request(toId, EP_CMD_Q_S1_E_, &txData, &txSize))
{
write(sp, buffer(txData, txSize)); // Step 4: Send the request via Serial Port.
} char rxData[];
boost::system::error_code err; sp.read_some(buffer(rxData, ),err); // Read from serial port buffer
if (err)
{
ROS_INFO("Serial port read_some Error!");
return -;
} Ep_Header header; // Then let the EasyProfile do the rest such as data assembling and checksum verification.
if( EP_SUCC_ == EasyProfile_C_Interface_RX((char*)rxData, , &header))
{
// Quanternion received
unsigned int timeStamp = ep_Q_s1_e.timeStamp;
float q1 = ep_Q_s1_e.q[]; // Note 1, ep_Q_s1_e is defined in the EasyProfile library as a global variable
float q2 = ep_Q_s1_e.q[]; // Note 2, for the units and meaning of each value, refer to EasyObjectDictionary.h
float q3 = ep_Q_s1_e.q[];
float q4 = ep_Q_s1_e.q[];
ROS_INFO("Q: %f %f %f %f\n", q1, q2, q3, q4); sensor_msgs::Imu imu_data;
imu_data.header.stamp = ros::Time::now();
imu_data.header.frame_id = "base_link";
imu_data.orientation.x = q3;
imu_data.orientation.y = -q2;
imu_data.orientation.z = -q1;
imu_data.orientation.w = q4; IMU_pub.publish(imu_data);
} io.run();
ros::spinOnce();
loop_rate.sleep();
} return ;
}
在CMakeLists中添加:
add_compile_options(-std=c99) aux_source_directory(./src DIR_SRCS)
add_executable(imu ${DIR_SRCS} )
target_link_libraries(imu ${catkin_LIBRARIES})
使用catkin_make编译后,source ./devel/setup.bash,然后运行rosrun imu imu。这时可能会出现无法打开串口的错误,给串口添加权限后再次运行:
sudo chmod /dev/ttyUSB0
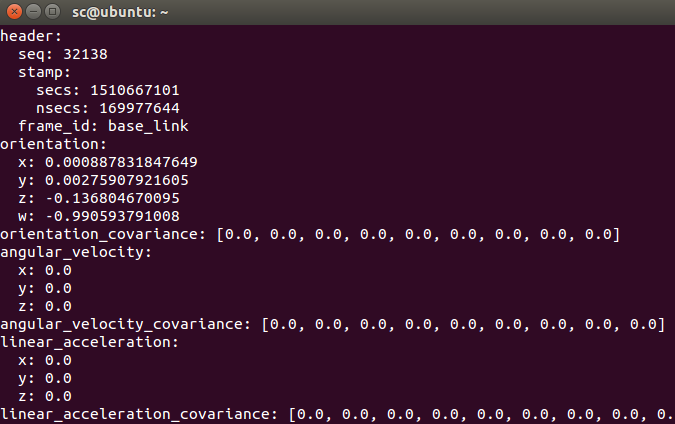
无问题后可以输入下面的指令查看话题,转动IMU可以看到orientation的四个分量一直在变化:
rostopic echo /IMU_data
为了更形象的显示IMU姿态,可以下载rviz_imu_plugin插件并安装。The rviz_imu_plugin package is used to display sensor_msgs/Imu messages in rviz. Once you download and compile the package, it should be visible as a plugin. It displays the orientation of the IMU using a box as well as and coordinate axes. The acceleration can be visualized using a vector.
Make sure you have git installed:
sudo apt-get install git-core
Download the stack from our repository into your catkin workspace
git clone -b indigo https://github.com/ccny-ros-pkg/imu_tools.git
Compile the stack:
cd ~/catkin_ws
catkin_make
装好后打开rviz,可以看到rviz_imu_plugin与rviz中默认自带的rviz_plugin_tutorials并不一样:
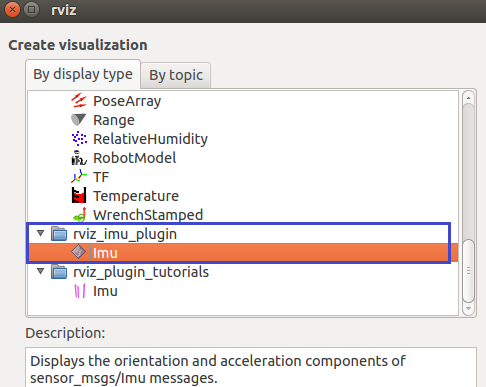
在rviz_imu_plugin下添加imu,修改Fixed Frame为base_link,IMU下面的Topic选为/IMU_data,转动IMU rviz中的虚拟立方体和坐标轴会跟着转动(可以更改box三个方向尺寸的比例):

参考:
Serial Cross-platform, Serial Port library written in C++
ROS中发布IMU传感器消息的更多相关文章
- ROS中发布激光扫描消息
激光雷达工作时会先在当前位置发出激光并接收反射光束,解析得到距离信息,而后激光发射器会转过一个角度分辨率对应的角度再次重复这个过程.限于物理及机械方面的限制,激光雷达通常会有一部分“盲区”.使用激光雷 ...
- ROS中利用V-rep进行地图构建仿真
V-rep中显示激光扫描点 在VREP自带的场景中找到practicalPathPlanningDemo.ttt文件,删除场景中多余的物体只保留静态的地图.然后在Model browser→comp ...
- 对比几种在ROS中常用的几种SLAM算法
在此因为要总结写一个文档,所以查阅资料,将总结的内容记录下来,欢迎大家指正! 文章将介绍使用的基于机器人操作系统(ROS)框架工作的SLAM算法. 在ROS中提供的五种基于2D激光的SLAM算法分别是 ...
- 将ROS中的/sensor_msgs/NavSatFix数据导入google earth显示轨迹
将ros中的gps_msg数据导入google earth显示轨迹 [TOC] 1. 获取GPS数据 将ros中发布的gps topic输出到文本中 rostopic echo -p /gpsData ...
- [转]ROS 传感器消息及RVIZ可视化Laserscan和PointCloud
https://blog.csdn.net/yangziluomu/article/details/79576508 https://answers.ros.org/question/60239/ho ...
- ROS中的日志(log)消息
学会使用日志(log)系统,做ROS大型项目的主治医生 通过显示进程的运行状态是好的习惯,但需要确定这样做不会影响到软件的运行效率和输出的清晰度.ROS 日志 (log) 系统的功能就是让进程生成一些 ...
- ROS开发--在订阅话题的回调函数中发布话题
处理激光数据时,需要将处理后的激光数据再发布,需要保持一致的频率,所以必须在回调函数中发布激光数据信息. 代码参考:https://blog.csdn.net/heyijia0327/article/ ...
- ROS中测试机器人里程计信息
在移动机器人建图和导航过程中,提供相对准确的里程计信息非常关键,是后续很多工作的基础,因此需要对其进行测试保证没有严重的错误或偏差.实际中最可能发生错误的地方在于机器人运动学公式有误,或者正负号不对, ...
- ROS主题发布订阅
节点是一个可执行程序,它连接到了ROS的网络系统中.我们将会创建一个发布者,也就是说话者节点,它将会持续的广播一个信息. 改变目录到之前所建立的那个包下: cd ~/catkin_ws/src/beg ...
随机推荐
- C#多线程读写同一文件处理
在多线程访问读写同一个文件时,经常遇到异常:“文件正在由另一进程使用,因此该进程无法访问此文件”. 多线程访问统一资源的异常, 解决方案1,保证读写操作单线程执行,可以使用lock 解决方案2,使用S ...
- python模块uuid产生唯一id
使用版本4:uuid4就可以了 UUID4缺点:糟糕的随机数发生器使得它更有可能发生碰撞,但是概率真的很小 UUID1缺点:暴露隐私 If all you want is a unique ID, y ...
- window.parent window.top window.parent.location.pathname 没权限
跨域问题啊,如果只是测试的话,放到服务器去测试,本地的(http://localhost/)就算是在同一个文件下,都会被认为跨域的.如果不需要支持低版本IE浏览,可以使用postMessage处理这个 ...
- NOI 2015 Bless All!
明天day1,加油!RP++! (话说出题人貌似是dyf&lyd?好虚啊……
- PHP通用返回值设置
遇到一个不错的php代码.记录一下. 在写php代码时,经常会遇到需要返回值的情况,可以统一设置一下返回值的格式.下面就是一个不错的例子. 配置类Return.conf.php <?php de ...
- Nutch1.7学习笔记:基本环境搭建及使用
Nutch1.7学习笔记:基本环境搭建及使用 作者:雨水,时间:2013-10-31博客地址:http://blog.csdn.net/gobitan 说明:Nutch有两个主版本1.x和2.x,它们 ...
- 八一八android与Linux的关系
Linux与Androld的关系 虽然Android基于Linux内核,但是它与Linux之间还是有很大的差别,比如Android在Linux内核的基础上添加了自己所特有的驱动程序.下面我们就来分析一 ...
- Openstack中为虚拟机使用CDROM光驱设备
在Libvirt里处理 在nova里处理 实际效果 怎么卸载 在Libvirt里处理 尝试了下面有几种方法,为虚拟机载入光盘文件: 1.使用ide方式挂载: virsh attach-disk {in ...
- 【Git】Git-add之后-忽略部分文件的方法
Git-add之后-忽略部分文件的方法 SparkKafkaDemo - Streaming Statistics git add 部分_百度搜索 (1 封私信)git 中如何撤销部分修改? - 知乎 ...
- Hadoop2.2.0安装配置手册!完全分布式Hadoop集群搭建过程~(心血之作啊~~)
http://blog.csdn.net/licongcong_0224/article/details/12972889 历时一周多,终于搭建好最新版本hadoop2.2集群,期间遇到各种问题,作为 ...