内存布局------c++程序设计基础、编程抽象与算法策略

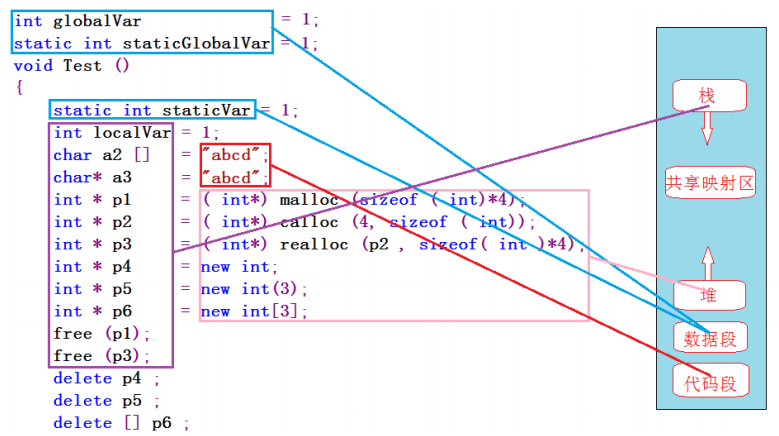
图中给出了在一个典型c++程序中如何组织内存的框架。程序中的指令(在底层都是按位存储的)、全局变量、静态对象和只读常量往往被存储在静态去(static area)(第二个图中的数据段、代码段。值得注意的一点是:代码段中存储的是可执行的代码和只读常量,很多人看到代码段就认为里面只有代码,数据段里面才是存储数据的,其实不是这样的。),该区域位于地址编址号较小的接近机器地址空间的开始处。该区域所分配的内存量在程序运行期间不会发生改变。关于全局对象,是在main()函数执行前就分配好了的。其实,在main()函数中的显示代码执行之前,会调用一个由编译器生成的_main()函数,而_main()函数会进行所有全局对象的的构造及初始化工作。而在main()函数结束之前,会调用由编译器生成的exit函数,来释放所有的全局对象。比如下面的代码:
int main()
{
… …// 显式代码
}
实际上,被转化成这样:
int main()
{
_main(); //隐式代码,由编译器产生,用以构造所有全局对象
… … // 显式代码
… …
exit() ; // 隐式代码,由编译器产生,用以释放所有全局对象
}
刚才讲的是静态存储区中的全局对象,那么,局部静态对象了?局部静态对象通常也是在函数中定义的,就像栈对象一样,只不过,其前面多了个static关键字。局部静态对象的生命期是从其所在函数第一次被调用,更确切地说,是当第一次执行到该静态对象的声明代码时,产生该静态局部对象,直到整个程序结束时,才销毁该对象。
还有一种静态对象,那就是它作为class的静态成员。考虑这种情况时,就牵涉了一些较复杂的问题。
第一个问题是class的静态成员对象的生命期,class的静态成员对象在初始化静态成员对象就产生了,直到整个程序结束时,才销毁该对象。
第二个问题是,当出现下列情况时:
#include<iostream>
using namespace std;
class a {public:static int* g; };
int* a::g = new int;
class b : public a{};
class c : public b{};
int main() {
cout << a::g << endl;
cout << b::g << endl;
cout << c::g << endl;
}
输出结果
00E89F10
00E89F10
00E89F10
继承类和基类共用一个静态成员变量。
内存中的最高地址区表示栈区(stack area)。当你的程序每调用一个函数或者方法,计算机(编译器自动管理)就会在这个内存区创建一个新的栈帧。当函数返回时,所创建的栈帧会被撤销,以为后续的函数调用所需的栈帧释放内存。通常栈空间容量比较小,一般是1MB~2MB,可设置大小。栈是机器系统提供的数据结构,计算机会在底层对栈提供支持:分配专门的寄存器存放栈的地址,压栈出栈都有专门的指令执行,这就决定了栈的效率比较高。栈内存的分配是连续的,类似于平时我们所说的栈,如果还不清楚,那么就把它想成数组,它的内存分配是连续分配的,即,所分配的内存是在一块连续的内存区域内.当我们声明变量时,那么编译器会自动接着当前栈区的结尾来分配内存.栈向下,向低地址方向增长。对于栈,它是一个先进后出的队列,进出一一对应,不会产生碎片。只要栈的剩余空间大于所申请空间,系统将为程序提供内存,否则将报异常提示栈溢出。
处于栈区和静态区之间的内存区域被称为堆区(heap area)。(程序员手工管理)该区域会在程序运行时请求更多内存的时候发挥作用。唯一的方法是用new(malloc)。相比于栈空间,堆的容量要大得多。一般来讲在32位系统下,堆内存可以达到4G的空间。堆则是C/C++函数库提供的,它的机制是很复杂的,例如为了分配一块内存,库函数会按照一定的算法(具体的算法可以参考数据结构/操作系统)在堆内存中搜索可用的足够大小的空间,如果没有足够大小的空间(可能是由于内存碎片太多),就有可能调用系统功能去增加程序数据段的内存空间,这样就有机会分到足够大小的内存,然后进行返回。显然,堆的效率比栈要低得多。操作系统有一个记录空闲内存地址的链表,当系统收到程序的申请时, 会遍历该链表,寻找第一个空间大于所申请空间的堆结点,然后将该结点从空闲结点链表中删除,并将该结点的空间分配给程序,另外,对于大多数系统,会在这块 内存空间中的首地址处记录本次分配的大小,这样,代码中的delete语句才能正确的释放本内存空间。另外,由于找到的堆结点的大小不一定正好等于申请的 大小,系统会自动的将多余的那部分重新放入空闲链表中。频繁的new/delete会造成大量碎片,使程序效率降低。堆向上,向高地址方向增长。用malloc 或new 申请内存之后,应该立即检查指针值是否为NULL。防止使用指针值为NULL 的内存。
内联函数的临时变量存在main的栈上,相当于main的临时变量。
这是一个前辈写的,非常详细
//main.cpp
int a = 0; 全局初始化区
char *p1; 全局未初始化区
main()
{
int b; 栈
char s[] = “abc”; 栈
char *p2; 栈
char *p3 = “123456”; 123456\0在常量区,p3在栈上。
static int c =0; 全局(静态)初始化区
p1 = (char *)malloc(10);
p2 = (char *)malloc(20);
分配 得来得10和20字节的区域就在堆区。
strcpy(p1, “123456”); 123456\0放在常量区,编译器可能会将它与p3所指向的”123456”优化成一个地方。
}
c++程序设计基础、编程抽象与算法策略
另有说法是5个区
作者:Acjx
来源:知乎
著作权归作者所有。商业转载请联系作者获得授权,非商业转载请注明出处。
1.在网上查资料看到:两种说法,一种是分为 栈,堆,自由存储区,全局,常量;第二,堆,栈,全局,常量,程序代码区,到底哪一个是对的呢?我个人一直是理解堆和自由存储区是一种东西,请解答一下疑惑
2,另外一个问题:类的成员函数,存放在什么地方呢?
1 .rodata段:存放只读数据,比如printf语句中的格式字符串和开关语句的跳转表。也就是你所说的常量区。
例如,全局作用域中的 const int ival = 10,ival存放在.rodata段
再如,函数局部作用域中的printf("Hello world %d\n", c);语句中的格式字符串"Hello world %d\n",也存放在.rodata段
2 .text段:存放已编译程序的机器代码。
注意:程序加载运行时,.rodata段和.text段通常合并到一个Segment(Text Segment)中,操作系统将这个Segment的页面只读保护起来,防止意外的改写。
3 .data段:存放已初始化的全局变量。而局部变量在运行时保存在栈中,既不出现在.data段,也不出现在.bss段中。就是你所说的全局区。
例如:全局作用域中的int ival = 10,static int a = 30,以及局部作用域中的static int b = 30,这3个变量均存放在.data段中。注意,局部作用域中的static变量的生命周期和其余栈变量的生命周期是不同的。
4 .bss段:存放未初始化的全局变量。在目标文件中这个段不占据实际的空间,它仅仅是一个占位符,在加载时这个段用0填充。目标文件区分初始化和未初始化变量是为了空间效率:在目标文件中,未初始化变量不需要占据任何实际的磁盘空间。全局变量如果不初始化则初值为0,同理可以推断,static变量(不管是函数里的还是函数外的)如果不初始化则初值也是0,也分配在.bss段。
例如,全局作用域中的int ival; ival显然存放在.bss段
注意:.data和.bss在加载时合并到一个Segment(Data Segment)中,这个Segment是可读可写的。
5. 栈:函数的参数和局部变量是分配在栈上(但不包括static声明的变量)。在函数被调用时,栈用来传递参数和返回值。由于栈的后进先出特点,所以栈特别方便用来保存/恢复调用现场。
6. 堆:用于存放进程运行中被动态分配的内存段,它的大小并不固定,可动态扩张或缩减。当进程调用malloc/free等函数分配内存时,新分配的内存就被动态添加到堆上(堆被扩张)/释放的内存从堆中被剔除(堆被缩减)
现在回答你第二个问题,类的成员函数存放在代码段。
在C++中,如果类中有虚函数,那么它就会有一个虚函数表的指针__vfptr,在类对象最开始的内存数据中。之后是类中的成员变量的内存数据。注意要考虑对齐。

内存布局------c++程序设计基础、编程抽象与算法策略的更多相关文章
- 声明函数指针、回调函数、函数对象------c++程序设计基础、编程抽象与算法策略
声明函数指针 #include<iostream> using namespace std; double a(double aa) { return aa; } int main() { ...
- Anatomy of a Program in Memory.剖析程序的内存布局
原文标题:Anatomy of a Program in Memory 原文地址:http://duartes.org/gustavo/blog/ [注:本人水平有限,只好挑一些国外高手的精彩文章翻译 ...
- 探讨C++ 变量生命周期、栈分配方式、类内存布局、Debug和Release程序的区别
探讨C++ 变量生命周期.栈分配方式.类内存布局.Debug和Release程序的区别(一) 今天看博客园的文章,发现博问栏目中有一个网友的问题挺有趣的,就点进去看了下,标题是“C++生存期问题”,给 ...
- C语言程序内存布局
C语言程序内存布局 如有转载,请注明出处:http://blog.csdn.net/embedded_sky/article/details/44457453 作者:super_bert@csdn 一 ...
- ESP32应用程序的内存布局
应用程序内存布局 ESP32芯片具有灵活的内存映射功能.本节介绍ESP-IDF在默认情况下如何使用这些功能. ESP-IDF中的应用程序代码可以放置在以下内存区域之一中. IRAM(指令RAM) ES ...
- UNIX高级环境编程(8)进程环境(Process Environment)- 进程的启动和退出、内存布局、环境变量列表
在学习进程控制相关知识之前,我们需要了解一个单进程的运行环境. 本章我们将了解一下的内容: 程序运行时,main函数是如何被调用的: 命令行参数是如何被传入到程序中的: 一个典型的内存布局是怎样的: ...
- 一起talk C栗子吧(第一百三十一回:C语言实例--C程序内存布局三)
各位看官们,大家好.上一回中咱们说的是C程序内存布局的样例,这一回咱们继续说该样例.闲话休提,言归正转.让我们一起talk C栗子吧. 看官们,关于C程序内存布局的样例,我们在前面的两个章回都介绍过了 ...
- 用一个词(TASPK)牢记C程序内存布局
一个典型的C程序内存布局,从低地址到高地址分别为: 1. text (正文段,即代码段 Code Segment) 2. data (已经初始化的数据段) 3. bss (未被初始化的数据段 Bloc ...
- C语言程序的内存布局
C语言程序的内存布局 一:C语言程序的存储区域 C语言编写的程序经过编绎-链接后,将形成一个统一的文件,它由几个部分组成,在程序运行时又会产生几个其他部分,各个部分代表了不同的存储区域: 1.代码段( ...
随机推荐
- PHP中GD库的使用
1.基本步骤 <?php /** * Created by PhpStorm. * User: jiqing * Date: 18-4-9 * Time: 上午9:34 * 熟悉步骤 */ // ...
- 缓存 memcached 与 redis
Memcached Memcached 是一个高性能的分布式内存对象缓存系统,用于动态Web应用以减轻数据库负载.它通过在内存中缓存数据和对象来减少读取数据库的次数,从而提高动态.数据库驱动网站的速度 ...
- 虚拟机在 OpenStack 里没有共享存储条件下的在线迁移
虚拟机在 OpenStack 里没有共享存储条件下的在线迁移 本文尝试回答与 Live migration 相关的几个问题:Live migration 是什么?为什么要做 Live migratio ...
- springboot成神之——ioc容器(依赖注入)
springboot成神之--ioc容器(依赖注入) spring的ioc功能 文件目录结构 lang Chinese English GreetingService MyRepository MyC ...
- java 删除文件夹 / 删除某文件夹下的所有文件
import java.io.File; /*************************删除文件夹delFolder / 删除文件夹中的所有文件delAllFile *start******** ...
- 第九章 整合Mybatis(待续)
··········
- Protege4.3使用入门(二)
1.支持OWLViz 利用OWLViz查看我们构建Class的结构图.如果尚未安装,请到http://www.graphviz.org/pub/graphviz/stable/windows/grap ...
- Android使用简单的Service
首先要自定义一个Service,设定它在后台要干什么. public class MyService extends Service { @Nullable @Override public IBin ...
- JAVA简单的文件I/O操作实例
如果只是对文件进行普通的读写,可以不用文件流. 以下是实例: File file = new File("test1.txt"); //向文件写入数据的 PrintWriter p ...
- Android独立交叉编译环境搭建
我们经常需将一些C/C++源码编译成本地二进制,直接在android的linux内核上运行,这是就需要进行交叉编译.由于Android的运行环境核普通Linux又区别,所以常规方式针对ARM进行交叉编 ...